一种可自动调节靠背的人体工学椅的制作方法
本技术涉及座椅领域,具体涉及一种可自动调节靠背的人体工学椅。
背景技术:
1、目前市场上的人体工学椅的靠背采用手动调节,而每当重量发生变化又需要手动重新调节靠背的倾角,即靠背倾角无法根据体重而自适应性调节。因此现有的人体工学椅对经常需要更换的坐姿或不同的体重的人使用并不方便,例如医师在进行手术操作前需要调节椅子的高低、靠背倾角、扶手的高低和角度等一些列的复杂操作,一方面浪费时间,二是医师坐姿改变后椅子的靠背无法随之改变倾角以支撑医师的腰背部,如果不重新调整,长时间使用使得腰部不舒适感明显加剧,日积月累造成腰椎损伤。另外,现有人体工学椅的扶手灵活度有限,在一定程度上限制了用户的使用,使用更为不便。
技术实现思路
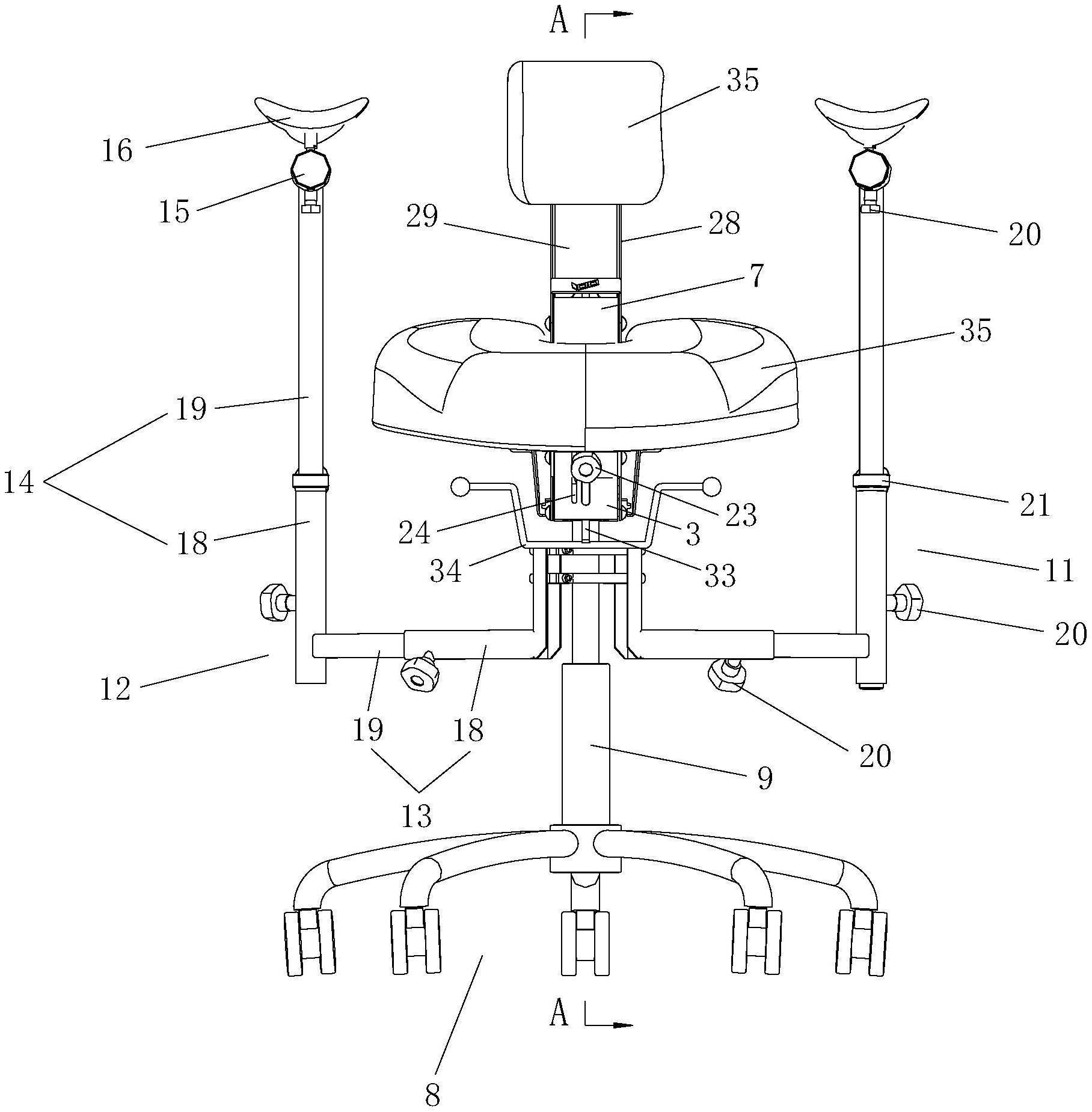
1、针对现有技术中的缺陷,以增加靠背的自适应调节功能和扶手的灵活性,提高对人体腰椎部位的保护。本实用新型提供了一种可自动调节靠背的人体工学椅,包括升降底座、调节机构、坐垫支撑件和靠背支撑件;所述调节机构包括第一摆臂、第二摆臂、第三摆臂和第一伸缩缸;所述第一摆臂、第二摆臂、第三摆臂和坐垫支撑件依次铰接并形成铰接四杆机构,其中第一摆臂和第二摆臂均位于坐垫支撑件的下方,以及第三摆臂的上端往上延伸且延伸部与靠背支撑件连接;
2、所述第一摆臂固定连接于升降底座的上端,所述第一伸缩缸的上端和下端分别铰接于坐垫支撑件与第一摆臂之间,通过下压坐垫支撑件,进而使铰接四杆机构和第一伸缩缸联动且靠背支撑件相应的往前倾斜。
3、本实用新型的有益效果在于:调节结构通过坐在坐垫支撑件的人体重量自适应地调节靠背支撑件的倾角,使靠背支撑件始终支撑住人体的腰部。特别适用于长期保持坐姿的医师,即使医师根据随意改变坐姿而改变压在坐垫支撑件上的压力,也能使背支撑件支撑其腰部,从而减少了因长时间乘坐座椅对医师大腿血管造成的压迫,提高对人体腰部、大腿等部位的保护,同时也省去了手动调节的麻烦,节约了大量宝贵时间,使用更加方便。
4、优选地,所述第一伸缩缸设有两个,两个第一伸缩缸平行铰接于坐垫支撑件与第一摆臂之间。两个第一伸缩缸的下端连接于位于第一摆臂内侧的滑块,且滑块设有可转动的第一螺杆旋钮;所述第一摆臂设有沿竖直方向延伸的条形滑槽,所述第一螺杆旋钮的螺杆从条形滑槽穿出,进而使第一螺杆旋钮的旋钮位于第一摆臂外侧。转动第一螺杆旋钮的旋钮,
5、使第一螺杆旋钮的螺杆伸长,沿条形滑槽向上滑动滑块减小调节结构的反作用力,即减小靠背支撑件的支撑力度;向下滑动滑块增加调节结构的反作用力,即增加靠背支撑件的支撑力度。使用者可以根据自身需要调节支撑力度,靠背支撑件的适应性更强。
6、优选地,所述第一摆臂的内侧设有限制坐垫支撑件最低点的限位件;所述限位件包括竖直支撑板和倾斜支撑板,所述竖直支撑板的下端与第一摆臂固定连接,所述倾斜支撑板的下面与竖直支撑板的上端固定连接,以及倾斜支撑板的上面设有增加接触面积抵紧件。当第一伸缩缸的压缩量达到最大值后,抵紧件抵紧于坐垫支撑件的下面,将压力通过倾斜支撑板、竖直支撑板和第一摆臂传递至升降底座,起到保护第一伸缩缸的作用。
7、优选地,所述升降底座包括万向滚轮支架和第二伸缩缸,所述第二伸缩缸的下端与万向滚轮支架固定连接,以及第二伸缩缸的上端与第一摆臂固定连接且第二伸缩缸上端的开关栓穿过第一摆臂伸入第一摆臂的内侧。所述竖直支撑板的中部与一杠杆铰接;所述杠杆的一端位于所述开关栓的上方,以及杠杆的另外一端伸出第一摆臂且伸出的一端设有把手。往上提把手,通过杠杆压下开关栓,实现第二伸缩缸的解锁,方便调节第二伸缩缸的伸缩量,与现有座椅的伸缩缸相同。
8、优选地,所述坐垫支撑件和靠背支撑件均设有缓冲垫。
9、优选地,所述第二伸缩缸的伸缩轴设有对称分布于坐垫支撑件两边的左扶手支架和右扶手支架;所述左扶手支架和右扶手支架的结构相同,且均包括水平伸缩组件、竖直伸缩组件、扶手伸缩组件和臂托;所述水平伸缩组件的伸缩筒与第二伸缩缸的伸缩轴固定连接,水平伸缩组件的伸缩杆与竖直伸缩组件的伸缩筒固定连接,竖直伸缩组件的伸缩杆与扶手伸缩组件的伸缩杆固定连接,以及所述臂托转动连接于扶手伸缩组件的伸缩筒的上面;所述扶手伸缩组件的伸缩筒与伸缩杆之间通过滑轨组件滑动连接;所述水平伸缩组件的伸缩筒、竖直伸缩组件的伸缩筒和扶手伸缩组件的伸缩筒均设有用于控制对应伸缩杆的定位螺栓。水平伸缩组件采用方形管,水平伸缩组件的定位螺栓拧紧后,其伸缩杆的无法伸缩。竖直伸缩组件和扶手伸缩组件均采用圆形管,其中竖直伸缩组件的定位螺栓拧紧后,其伸缩杆无法转动和无法伸缩。如果要使竖直伸缩组件的伸缩杆可转动,但不升降,则需要在竖直伸缩组件的伸缩杆上增加管套螺栓,管套螺栓拧紧且竖直伸缩组件的定位螺栓松开,则竖直伸缩组件的伸缩杆不能下降,但可转动。扶手伸缩组件的定位螺栓锁紧后,扶手伸缩组件的伸缩筒则无法伸缩,保持臂托始终朝上,但臂托通过销轴可水平面内朝任意方向转动,再结合竖直伸缩组件可在水平面内转动,使得左扶手支架和右扶手支架的调节非常方便。
10、优选地,所述靠背支撑件与延伸部之间通过滑板和伸缩板连接,滑板和伸缩板滑动连接;所述伸缩板与延伸部铰接,且伸缩板设有可转动的第二螺杆旋钮,通过第二螺杆旋钮的螺杆抵紧于延伸部的下面,进而调节滑板与延伸部之间的夹角。所述伸缩板设有可转动的第三螺杆旋钮,所述滑板设有沿着滑板长边方向延伸的条形限位孔,第三螺杆旋钮的螺杆穿过条形限位孔,通过第三螺杆旋钮的旋钮夹紧滑板,进而使滑板与伸缩板固定。第二螺杆旋钮和第三螺杆旋钮分别用于调节靠背支撑件的倾角和高低。
技术特征:
1.一种可自动调节靠背的人体工学椅,其特征在于:包括升降底座、调节机构、坐垫支撑件和靠背支撑件;所述调节机构包括第一摆臂、第二摆臂、第三摆臂和第一伸缩缸;所述第一摆臂、第二摆臂、第三摆臂和坐垫支撑件依次铰接并形成铰接四杆机构,其中第一摆臂和第二摆臂均位于坐垫支撑件的下方,以及第三摆臂的上端往上延伸且延伸部与靠背支撑件连接;
2.根据权利要求1所述的一种可自动调节靠背的人体工学椅,其特征在于:所述第一伸缩缸设有两个,两个第一伸缩缸平行铰接于坐垫支撑件与第一摆臂之间。
3.根据权利要求2所述的一种可自动调节靠背的人体工学椅,其特征在于:两个第一伸缩缸的下端连接于位于第一摆臂内侧的滑块,且滑块设有可转动的第一螺杆旋钮;所述第一摆臂设有沿竖直方向延伸的条形滑槽,所述第一螺杆旋钮的螺杆从条形滑槽穿出,进而使第一螺杆旋钮的旋钮位于第一摆臂外侧。
4.根据权利要求1所述的一种可自动调节靠背的人体工学椅,其特征在于:所述第一摆臂的内侧设有限制坐垫支撑件最低点的限位件;所述限位件包括竖直支撑板和倾斜支撑板,所述竖直支撑板的下端与第一摆臂固定连接,所述倾斜支撑板的下面与竖直支撑板的上端固定连接,以及倾斜支撑板的上面设有增加接触面积抵紧件。
5.根据权利要求4所述的一种可自动调节靠背的人体工学椅,其特征在于:所述升降底座包括万向滚轮支架和第二伸缩缸,所述第二伸缩缸的下端与万向滚轮支架固定连接,以及第二伸缩缸的上端与第一摆臂固定连接且第二伸缩缸上端的开关栓穿过第一摆臂伸入第一摆臂的内侧。
6.根据权利要求5所述的一种可自动调节靠背的人体工学椅,其特征在于:所述竖直支撑板的中部与一杠杆铰接;所述杠杆的一端位于所述开关栓的上方,以及杠杆的另外一端伸出第一摆臂且伸出的一端设有把手。
7.根据权利要求1所述的一种可自动调节靠背的人体工学椅,其特征在于:所述坐垫支撑件和靠背支撑件均设有缓冲垫。
8.根据权利要求5所述的一种可自动调节靠背的人体工学椅,其特征在于:所述第二伸缩缸的伸缩轴设有对称分布于坐垫支撑件两边的左扶手支架和右扶手支架;所述左扶手支架和右扶手支架的结构相同,且均包括水平伸缩组件、竖直伸缩组件、扶手伸缩组件和臂托;
9.根据权利要求1所述的一种可自动调节靠背的人体工学椅,其特征在于:所述靠背支撑件与延伸部之间通过滑板和伸缩板连接,滑板和伸缩板滑动连接;所述伸缩板与延伸部铰接,且伸缩板设有可转动的第二螺杆旋钮,通过第二螺杆旋钮的螺杆抵紧于延伸部的下面,进而调节滑板与延伸部之间的夹角。
10.根据权利要求9所述的一种可自动调节靠背的人体工学椅,其特征在于:所述伸缩板设有可转动的第三螺杆旋钮,所述滑板设有沿着滑板长边方向延伸的条形限位孔,第三螺杆旋钮的螺杆穿过条形限位孔,通过第三螺杆旋钮的旋钮夹紧滑板,进而使滑板与伸缩板固定。
技术总结
本技术公开了一种可自动调节靠背的人体工学椅,包括升降底座、调节机构、坐垫支撑件和靠背支撑件;所述调节机构包括第一摆臂、第二摆臂、第三摆臂和第一伸缩缸;所述第一摆臂、第二摆臂、第三摆臂和坐垫支撑件依次铰接并形成铰接四杆机构,其中第一摆臂和第二摆臂均位于坐垫支撑件的下方,以及第三摆臂的上端往上延伸且延伸部与靠背支撑件连接;所述第一摆臂固定连接于升降底座的上端,所述第一伸缩缸的上端和下端分别铰接于坐垫支撑件与第一摆臂之间,通过下压坐垫支撑件,进而使铰接四杆机构和第一伸缩缸联动且靠背支撑件相应的往前倾斜。本技术增加了靠背的自适应调节功能和扶手的灵活性,提高对人体腰椎部位的保护。
技术研发人员:肖明,姚依然
受保护的技术使用者:一佰(郑州)医疗科技有限公司
技术研发日:20230308
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!