一种窗帘机器人的制作方法
本技术涉及智能家居,特别是涉及一种窗帘机器人。
背景技术:
1、居家窗帘一般可通过吊环悬挂于u形导轨上,窗帘带动吊环沿u形导轨滑动即可实现窗帘的收拢或散开。随着通信、互联网、物联网、家电、家居等行业的迅速发展,家居智能化越来越流行。为了使窗帘能够自动化、智能化,需要通过窗帘机器人对窗帘进行控制,可将窗帘机器人悬挂于u形导轨上,窗帘机器人通过滚轮带动窗帘沿u形导轨的延伸方向移动,实现窗帘收拢和散开,从而提升窗帘开合的便利性。
2、但是现有的窗帘机器人在带动窗帘沿u形导轨移动的过程中,窗帘机器人容易跑偏,导致滚轮掉入u形导轨的凹槽中,从而造成窗帘机器人移动阻力增大,影响窗帘机器人的使用效果。
3、因此,有必要提供一种窗帘机器人,从而确保窗帘机器人不会跑偏,增强窗帘机器人的使用效果。
技术实现思路
1、为了解决上述问题,本申请提出一种窗帘机器人,用于防止滚轮偏离导轨的延伸方向滚动,避免滚轮伸入导轨的凹槽内而导致窗帘机器人无法正常使用。
2、本申请通过以下技术方案实现的:
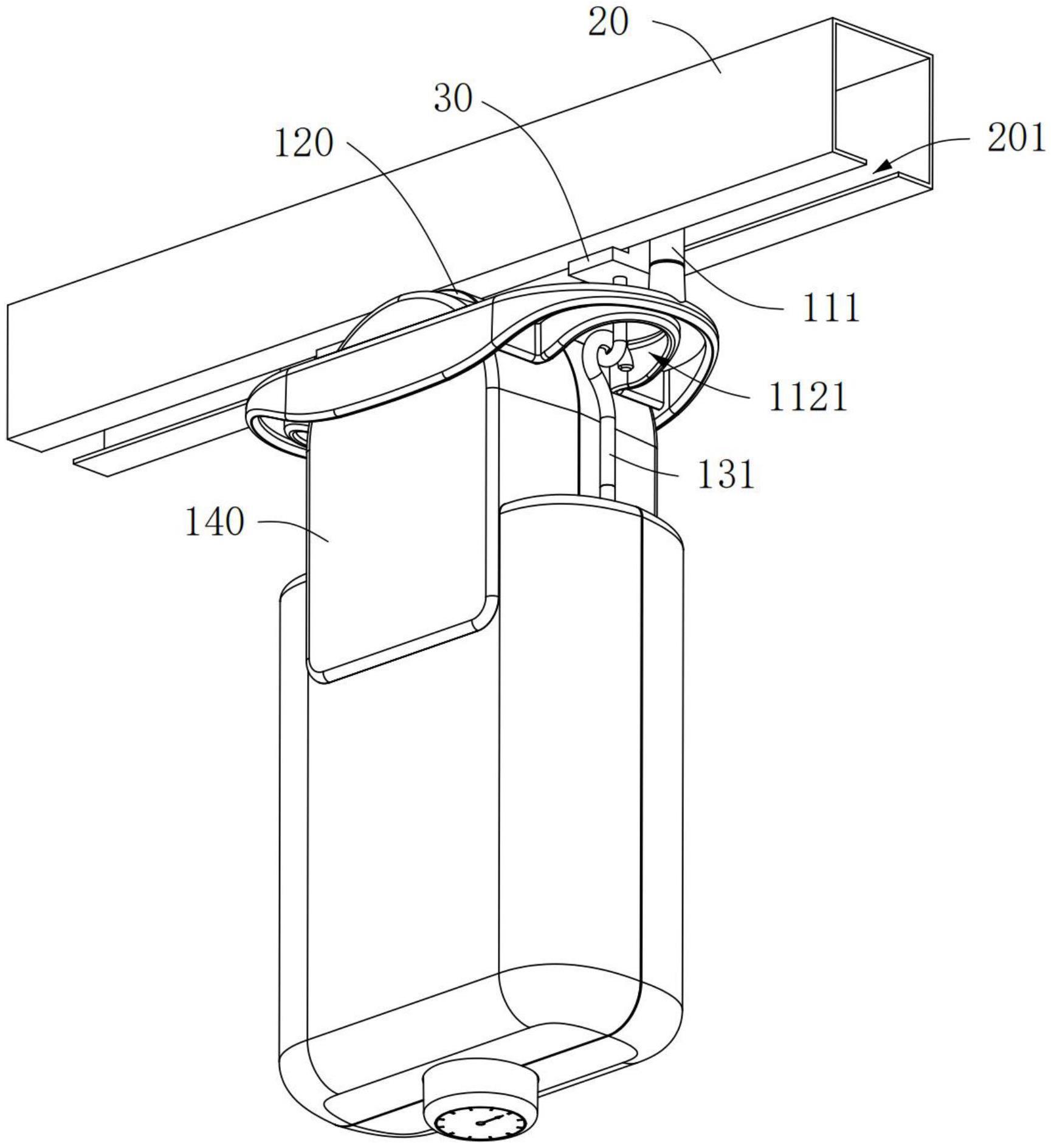
3、本申请提出一种窗帘机器人,包括挂件组、限位组以及滚轮,所述挂件组与导轨凹槽中的窗帘挂钩相连接;所述限位组和所述挂件组设置于导轨的延伸方向;所述滚轮设于所述挂件组之间;所述滚轮与导轨有凹槽的一面贴合,所述滚轮可沿导轨的延伸方向滚动,所述限位组伸入导轨的凹槽内,以防止滚轮偏离导轨的长度方向滚动。
4、在本申请的一实施例中,所述限位组包括至少两根限位柱,两根所述限位柱伸入导轨的凹槽内。
5、在本申请的一实施例中,两根所述限位柱可转动地设于导轨的凹槽内,且两根所述限位柱与导轨凹槽的槽口具有间距。
6、在本申请的一实施例中,两根所述限位柱设置于滚轮两端,其中一根所述限位柱设于滚轮的一端,另一根所述限位柱设于滚轮的另一端。
7、在本申请的一实施例中,定义一所述滚轮周向面的中间并垂直于滚轮滚动方向的面为截面,两根限位柱的径向和截面一致。
8、在本申请的一实施例中,所述挂件组包括至少两个挂件,两个所述挂件与导轨凹槽中的窗帘挂钩相连接。
9、在本申请的一实施例中,窗帘机器人还包括主体,所述滚轮和所述两个挂件设于主体上,其中一个所述挂件设于滚轮的一端,另一个所述挂件设于滚轮的另一端。
10、在本申请的一实施例中,所述限位组包括一个连接件,所述连接件设于主体上,两根所述限位柱设于连接件上,两根所述限位柱可相对于连接件转动。
11、在本申请的一实施例中,所述连接件开设有穿孔,所述滚轮和两个所述挂件穿过所述连接件。
12、在本申请的一实施例中,窗帘机器人还包括第一驱动机构,设于主体内,第一驱动机构与挂件组固定连接,第一驱动机构可驱使挂件组朝向导轨的方向运动,或远离导轨的方向运动。
13、本申请的有益效果:挂件组与导轨凹槽中的窗帘挂钩相连接,限位组和挂件组设置于导轨的延伸方向,滚轮设于挂件组之间,滚轮与导轨有凹槽的一面贴合,滚轮可沿导轨的延伸方向滚动,限位组伸入导轨的凹槽内,滚轮沿导轨的延伸方向滚动,以将窗帘机器人沿导轨的延伸方向运动,滚轮沿导轨的延伸方向滚动过程中,由于限位组伸入导轨的凹槽内,防止滚轮偏离导轨的延伸方向滚动,从而防止帘机器人偏离导轨的延伸方向。
技术特征:
1.一种窗帘机器人,其特征在于,包括:
2.根据权利要求1所述的窗帘机器人,其特征在于,所述限位组包括至少两根限位柱,两根所述限位柱伸入导轨的凹槽内。
3.根据权利要求2所述的窗帘机器人,其特征在于,两根所述限位柱可转动地设于导轨的凹槽内,且两根所述限位柱与导轨凹槽的槽口具有间距。
4.根据权利要求2或3所述的窗帘机器人,其特征在于,两根所述限位柱设置于滚轮两端,其中一根所述限位柱设于滚轮的一端,另一根所述限位柱设于滚轮的另一端。
5.根据权利要求4所述的窗帘机器人,其特征在于,定义一所述滚轮周向面的中间并垂直于滚轮滚动方向的面为截面,两根限位柱的径向和截面一致。
6.根据权利要求2所述的窗帘机器人,其特征在于,所述挂件组包括至少两个挂件,两个所述挂件与导轨凹槽中的窗帘挂钩相连接。
7.根据权利要求6所述的窗帘机器人,其特征在于,窗帘机器人还包括:
8.根据权利要求7所述的窗帘机器人,其特征在于,所述限位组包括一个连接件,所述连接件设于主体上,两根所述限位柱设于连接件上,两根所述限位柱可相对于连接件转动。
9.根据权利要求8所述的窗帘机器人,其特征在于,所述连接件开设有穿孔,所述滚轮和两个所述挂件穿过所述连接件。
10.根据权利要求7所述的窗帘机器人,其特征在于,窗帘机器人还包括:
技术总结
本申请提出一种窗帘机器人,包括挂件组、限位组以及滚轮,挂件组与导轨凹槽中的窗帘挂钩相连接;限位组和挂件组设置于导轨的延伸方向;滚轮设于挂件组之间;滚轮与导轨有凹槽的一面贴合,滚轮可沿导轨的延伸方向滚动,限位组伸入导轨的凹槽内,以防止滚轮偏离导轨的长度方向滚动。当滚轮沿导轨的延伸方向滚动,以将窗帘机器人沿导轨的延伸方向运动,滚轮沿导轨的延伸方向滚动过程中,由于限位组伸入导轨的凹槽内,防止滚轮偏离导轨的延伸方向滚动,从而防止帘机器人偏离导轨的延伸方向。
技术研发人员:成铁芳
受保护的技术使用者:深圳市东汇智能电子有限公司
技术研发日:20230330
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!