一种雷达组件及机器人的制作方法
本技术涉及机器人,尤其涉及一种雷达组件及机器人。
背景技术:
1、扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家电的一种,能凭借人工智能,自动完成地面的清理工作,以将人们从繁琐的家务劳动中抽离出来,从而获得更多的娱乐与休闲时间。
2、建图导航与避障识别的能力是扫地机器人实现高效工作的重要基础,现阶段扫地机器人建图导航方式主要包括lds激光雷达导航、vslam视觉导航和dtof激光导航,避障识别方式主要包括线激光雷达避障、红外光源避障和3d tof避障。建图导航和避障识别通常是通过不同的雷达实现,成本较高,也有部分扫地机器人通过摄像头同时实现建图导航和避障识别,但是使用摄像头又会导致成本升高,且摄像头在夜间无法准确建图和避障。
技术实现思路
1、本实用新型实施例旨在提供一种雷达组件及机器人,以至少能够改善雷达组件成本高以及使用摄像头在夜间无法准确建图和避障的问题。
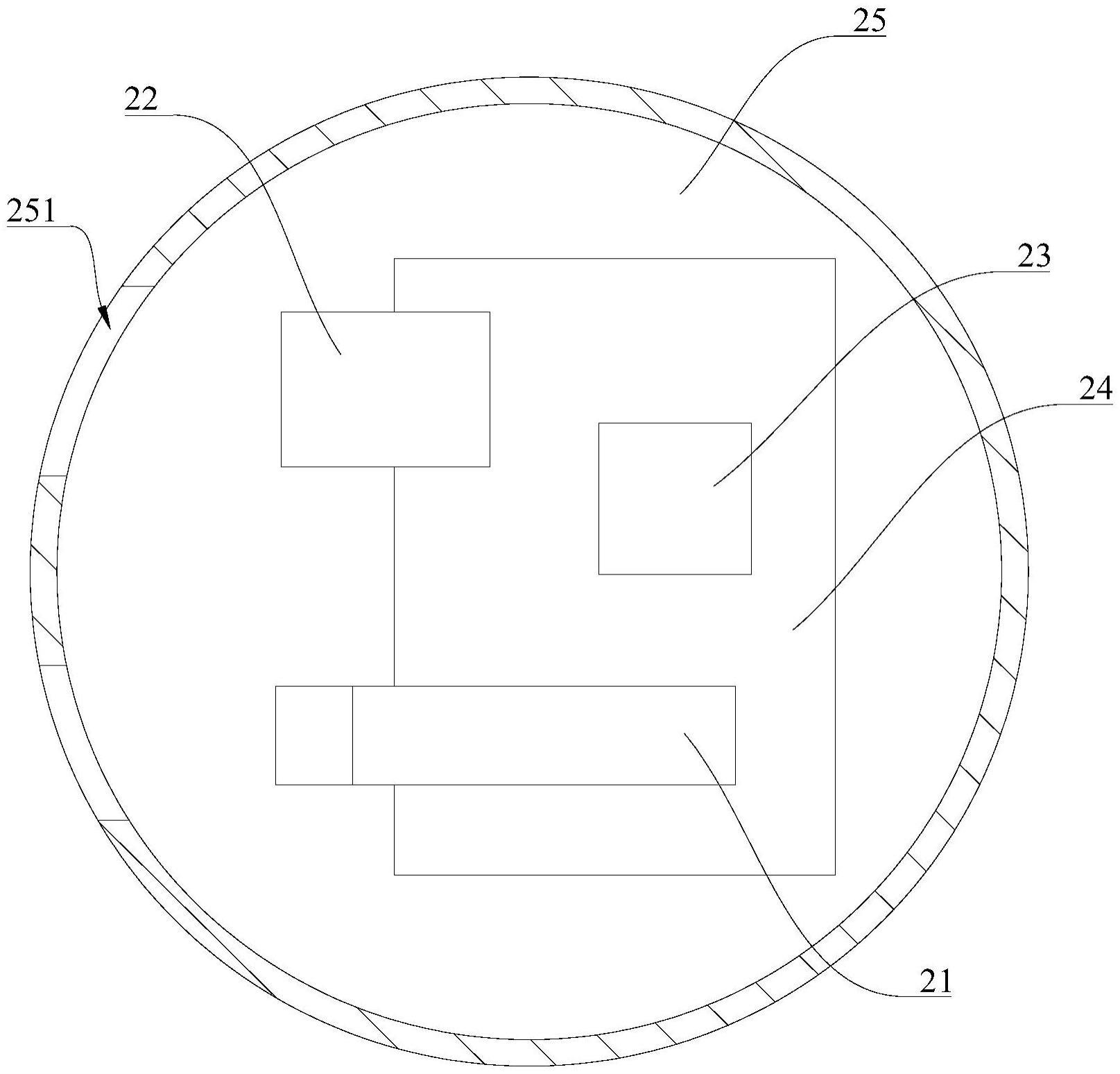
2、为解决上述技术问题,本实用新型实施方式采用的一个技术方案是:提供一种雷达组件,所述雷达组件包括发射单元、接收单元和处理单元,所述发射单元用于发射建图光线和避障光线;所述接收单元用于接收所述建图光线和所述避障光线经障碍物反射的光线;所述处理单元用于根据所述接收单元接收到的反射光线进行建图和避障。
3、在一些实施例中,所述发射单元包括发光件和分光件,所述分光件用于将所述发光件发出的光线分为至少两个子光线,至少两所述子光线包括所述建图光线和所述避障光线。
4、在一些实施例中,所述发射单元包括第一发光件和第二发光件,所述第一发光件用于发射所述建图光线,所述第二发光件用于发射所述避障光线。
5、在一些实施例中,所述第一发光件为点激光器,所述第二发光件为线激光器。
6、在一些实施例中,所述避障光线位于所述建图光线下方。
7、在一些实施例中,所述接收单元包括面阵式传感器。
8、在一些实施例中,所述面阵式传感器包括第一传感区域和第二传感区域,所述第一传感区域用于接收所述建图光线经障碍物反射的光线,所述第二传感区域用于接收所述避障光线经障碍物反射的光线。
9、在一些实施例中,所述接收单元包括第一传感器和第二传感器,所述第一传感器用于接收所述建图光线经障碍物反射的光线,所述第二传感器用于接收所述避障光线经障碍物反射的光线。
10、在一些实施例中,所述雷达组件还包括安装部,所述发射单元和所述接收单元均设置于所述安装部。
11、在一些实施例中,所述雷达组件还包括驱动部,所述驱动部与所述安装部连接,所述驱动部用于驱动所述安装部绕竖直轴线旋转运动。
12、为解决上述技术问题,本实用新型实施方式采用的另一个技术方案是:提供一种机器人,所述机器人包括上述的雷达组件。
13、区别于相关技术的情况,本实用新型实施例的雷达组件及机器人,包括发射单元、接收单元和处理单元,发射单元能够发射建图光线和避障光线,接收单元能够接收建图光线和避障光线经障碍物反射的光线,处理单元能够根据接收单元接收到的反射光线进行建图和避障,从而能够在一个雷达组件上完成建图和避障,降低雷达组件的成本,并且免于使用摄像头带来的增加成本和在夜间无法准确建图和避障的问题。
14、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种雷达组件,其特征在于,包括:
2.根据权利要求1所述的雷达组件,其特征在于,所述发射单元包括发光件和分光件,所述分光件用于将所述发光件发出的光线分为至少两个子光线,至少两所述子光线包括所述建图光线和所述避障光线。
3.根据权利要求1所述的雷达组件,其特征在于,所述发射单元包括第一发光件和第二发光件,所述第一发光件用于发射所述建图光线,所述第二发光件用于发射所述避障光线。
4.根据权利要求3所述的雷达组件,其特征在于,所述第一发光件为点激光器,所述第二发光件为线激光器。
5.根据权利要求1所述的雷达组件,其特征在于,所述接收单元包括面阵式传感器。
6.根据权利要求5所述的雷达组件,其特征在于,所述面阵式传感器包括第一传感区域和第二传感区域,所述第一传感区域用于接收所述建图光线经障碍物反射的光线,所述第二传感区域用于接收所述避障光线经障碍物反射的光线。
7.根据权利要求1所述的雷达组件,其特征在于,所述接收单元包括第一传感器和第二传感器,所述第一传感器用于接收所述建图光线经障碍物反射的光线,所述第二传感器用于接收所述避障光线经障碍物反射的光线。
8.一种机器人,其特征在于,包括:
技术总结
本技术涉及机器人技术领域,尤其涉及一种雷达组件及机器人,雷达组件包括发射单元、接收单元和处理单元,发射单元用于发射建图光线和避障光线;接收单元用于接收建图光线和避障光线经障碍物反射的光线;处理单元用于根据接收单元接收到的反射光线进行建图和避障。本技术实施例的雷达组件及机器人,能够在一个雷达组件上完成建图和避障,从而降低雷达组件的成本,并且免于使用摄像头带来的增加成本和在夜间无法准确建图和避障的问题。
技术研发人员:袁磊,郝树林,陈悦
受保护的技术使用者:深圳市欢创科技有限公司
技术研发日:20230419
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!