扫地机器人的制作方法
本申请涉及家用电器,特别是涉及一种扫地机器人。
背景技术:
1、现有扫地机器人内部设有激光雷达、激光探测器等其他传感器,透过前撞镜片探测外界信息。当扫地机器人工作完一段时间后,前撞镜片内部易粘附灰尘,需要用户及时清洁,否则会影响前撞镜片判断前方障碍信息。现有前撞镜片直接通过卡扣扣合在前撞上,不方便拆卸。当前撞镜片反复多次拆卸过程时,容易导致卡扣损坏等。
技术实现思路
1、本申请提供一种扫地机器人,以解决现有扫地机器人中前撞镜片直接通过卡扣扣合在前撞上,不方便拆卸;反复多次拆卸以及安装过程时,容易导致卡扣损坏等技术问题。
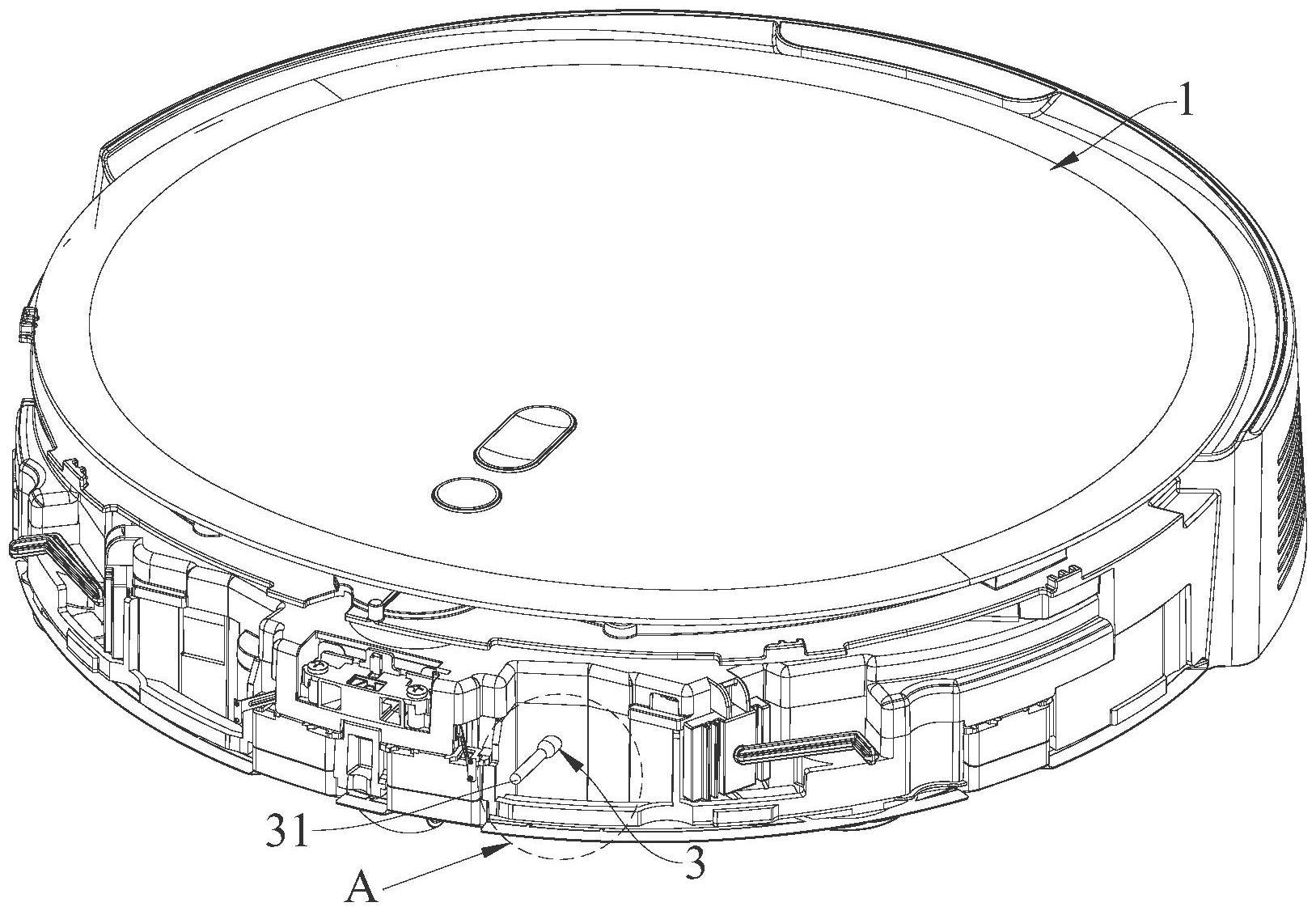
2、为解决上述技术问题,本申请提出一种扫地机器人,包括:主机本体;前撞组件,包括前撞本体以及前撞镜片,前撞镜片可拆卸设置于前撞本体内,前撞本体设置于主机本体部分外周表面;顶升组件,包括驱动组件以及推杆,驱动组件设置于主机本体内,推杆可伸缩设置于主机本体朝向前撞组件的一侧面,驱动组件连接推杆,用于驱动推杆将前撞镜片顶出。
3、其中,推杆远离主机本体的一端设置有柔性件。
4、其中,推杆远离主机本体的一端呈弧形。
5、其中,前撞镜片可吸附于前撞本体。
6、其中,前撞镜片朝向前撞本体的一侧面设置有若干个第一磁性件,第一磁性件插接并吸附于前撞本体。
7、其中,前撞本体朝向前撞镜片的一侧面开设有若干个定位孔,主机本体内设置有第二磁性件,第二磁性件位于定位孔内,在第一磁性件插接于定位孔时,第一磁性件与第二磁性件磁性连接。
8、其中,前撞镜片朝向前撞本体的一侧面环设有若干个第一磁性件,相邻第一磁性件之间间隔设置。
9、其中,前撞镜片朝向前撞本体的一侧外表面环设有第一磁性密封件,前撞本体靠近前撞镜片连接处环设有第二磁性密封件,第一磁性密封件和第二磁性密封件磁性且密封连接。
10、其中,前撞镜片包括相对设置的第一端和第二端,第一端和第二端中至少一个设置扣手部。
11、其中,主机本体设置有雷达组件,前撞本体设置有雷达视窗,雷达组件形成的雷达激光通过雷达视窗透射;和/或,前撞本体设置有至少一个线激光组件,前撞本体设置有线激光视窗,线激光组件形成的线激光通过线激光视窗透射。
12、本申请的有益效果是:区别于现有技术的情况,本申请提供一种扫地机器人。扫地机器人包括主机本体、前撞组件以及顶升组件,前撞组件包括前撞本体以及前撞镜片。前撞镜片可拆卸设置于前撞本体内。前撞本体设置于主机本体部分外周表面。顶升组件包括驱动组件以及推杆。驱动组件设置于主机本体内。推杆可伸缩设置于主机本体朝向前撞组件的一侧面。驱动组件连接推杆,用于驱动推杆将前撞镜片顶出。通过上述方式,实现前撞镜片快速拆卸,进而方便用户清理前撞镜片内部粘附灰尘,提升扫地机器人判断前方障碍信息的准确性。
技术特征:
1.一种扫地机器人,其特征在于,包括:
2.根据权利要求1所述的扫地机器人,其特征在于,所述推杆远离所述主机本体的一端设置有柔性件。
3.根据权利要求1所述的扫地机器人,其特征在于,所述推杆远离所述主机本体的一端呈弧形。
4.根据权利要求1所述的扫地机器人,其特征在于,所述前撞镜片可吸附于所述前撞本体。
5.根据权利要求4所述的扫地机器人,其特征在于,所述前撞镜片朝向所述前撞本体的一侧面设置有若干个第一磁性件,所述第一磁性件插接并吸附于所述前撞本体。
6.根据权利要求5所述的扫地机器人,其特征在于,所述前撞本体朝向所述前撞镜片的一侧面开设有若干个定位孔,所述主机本体内设置有第二磁性件,所述第二磁性件位于所述定位孔内,在所述第一磁性件插接于所述定位孔时,所述第一磁性件与所述第二磁性件磁性连接。
7.根据权利要求5所述的扫地机器人,其特征在于,所述前撞镜片朝向所述前撞本体的一侧面环设有若干个所述第一磁性件,相邻所述第一磁性件之间间隔设置。
8.根据权利要求4或5所述的扫地机器人,其特征在于,所述前撞镜片朝向所述前撞本体的一侧外表面环设有第一磁性密封件,所述前撞本体靠近所述前撞镜片连接处环设有第二磁性密封件,所述第一磁性密封件和所述第二磁性密封件磁性且密封连接。
9.根据权利要求1-7任一项所述的扫地机器人,其特征在于,所述前撞镜片包括相对设置的第一端和第二端,所述第一端和所述第二端中至少一个设置扣手部。
10.根据权利要求1-7任一项所述的扫地机器人,其特征在于,所述主机本体设置有雷达组件,所述前撞本体设置有雷达视窗,所述雷达组件形成的雷达激光通过所述雷达视窗透射;
技术总结
本申请公开了一种扫地机器人,包括:主机本体;前撞组件,包括前撞本体以及前撞镜片,前撞镜片可拆卸设置于前撞本体内,前撞本体设置于主机本体部分外周表面;顶升组件,包括驱动组件以及推杆,驱动组件设置于主机本体内,推杆可伸缩设置于主机本体朝向前撞组件的一侧面,驱动组件连接推杆,用于驱动推杆将前撞镜片顶出。本申请扫地机器人能够实现前撞镜片快速拆卸,进而方便用户清理前撞镜片内部粘附灰尘,提升扫地机器人判断前方障碍信息的准确性。
技术研发人员:石沛,施博爱,金晨浩,刘征宇,韩川,田攀,艾凯凯,宋永航,邓鹏
受保护的技术使用者:杭州华橙软件技术有限公司
技术研发日:20230505
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!