一种防撞的智能扫地机器人
本技术涉及扫地机器人,尤其涉及一种防撞的智能扫地机器人。
背景技术:
1、扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。
2、扫地机器人一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能,现有智能扫地机器人在工作时常会碰撞到其他地方,如碰撞到桌椅、墙角上等,由于碰撞会造成智能扫地机器人发生晃动会倾倒,导致智能扫地机器人的出现故障或清理工作停滞等。所以需要一种防撞的智能扫地机器人来解决上述问题。
技术实现思路
1、本实用新型的目的是为解决上述背景技术中提出的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
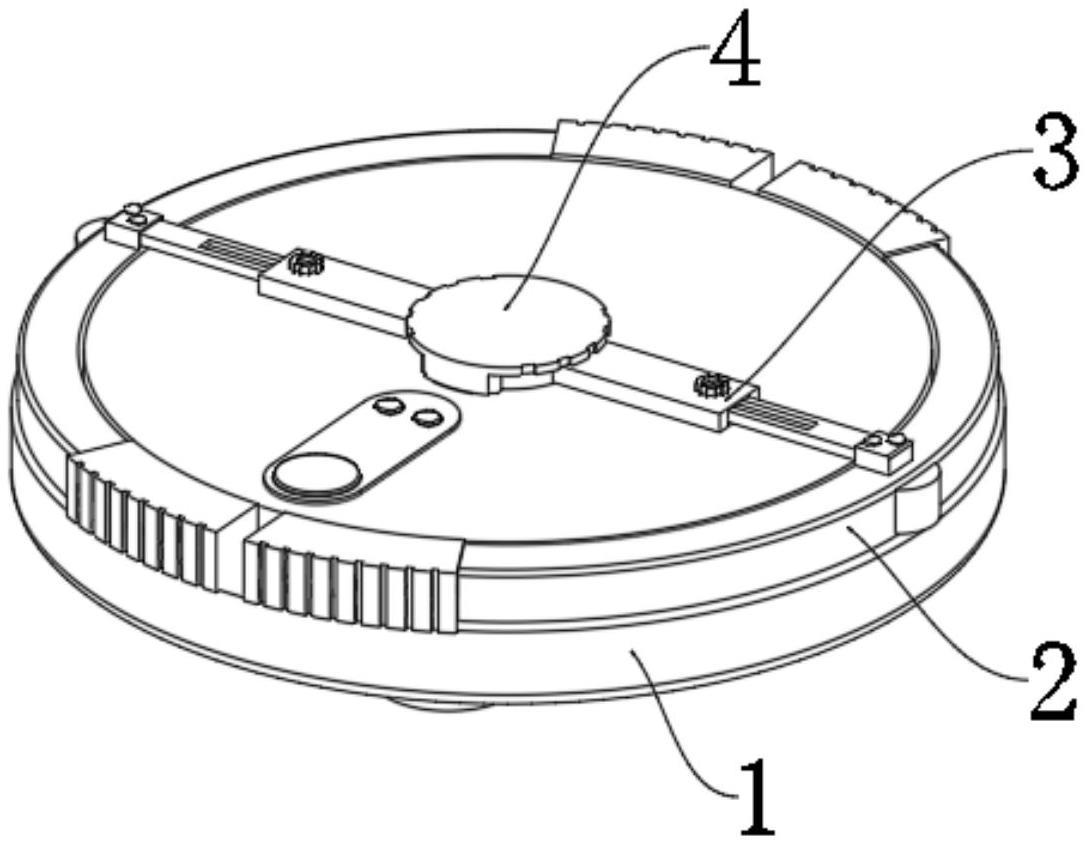
3、一种防撞的智能扫地机器人,包括扫地机器人本体,所述扫地机器人本体包括外壳,所述外壳顶端中心位置处连接有安装柱,且所述安装柱外侧套设安装有缓冲组件,所述缓冲组件包括卡环,所述卡环左右两侧对称连接有两个套板,且所述套板外侧插设有内板,所述内板左右两侧设置有防撞组件,所述防撞组件包括护栏,所述护栏呈c形结构设计。
4、优选的,所述护栏两端侧套设有橡胶套,所述橡胶套外侧等距开设有竖槽,所述护栏外侧中心位置处连接有橡胶块,所述护栏顶端连接有固定块,所述固定块通过螺栓与内板对接固定,通过护栏两端侧套设的橡胶套设计,可对护栏进行支撑,保证了护栏的冲击防撞效果。
5、优选的,所述套板顶端右侧通过螺纹孔插设有锁止螺栓,且所述锁止螺栓底端通过凹槽抵触在内板表面,通过锁止螺栓的轴端在套板的螺纹孔内部移动挤压在内板外侧,保证内板调节后的稳固性。
6、优选的,所述内板左侧连接有限位块,且所述限位块通过通槽内嵌在套板内部,所述限位块左侧连接有支撑弹簧,且所述支撑弹簧左侧与套板的通槽内壁相连接固定,通过套板的通槽可对限位块进行限位,避免内板在移动中脱离套板内部。
7、优选的,所述安装柱正反两侧对称连接有两个导向块,且所述导向块通过导槽插设在卡环内壁,安装柱两侧的导向块设计,可对卡环进行限位,保证卡环在安装中的稳定性。
8、优选的,所述安装柱顶端设置有支撑组件,所述支撑组件包括旋盖,所述旋盖底端边侧对称连接有两个卡板,且所述卡板通过卡槽内嵌在外壳内部,通过旋盖转动,可带动卡板在外壳的卡槽内部移动后锁止,保证了旋盖安装的稳固性。
9、优选的,所述旋盖底端中心位置处设置有稳撑部件,所述稳撑部件包括内轴,所述内轴底端通过通孔插设在轴套内部,所述内轴底端与轴套通孔内壁之间通过复位弹簧相连接固定,复位弹簧的回弹力可对内轴进行支撑,使内轴能够在移动对旋盖进行反撑,继而能够使卡板反扣在外壳的卡槽内部。
10、本实用新型至少具备以下有益效果:
11、1、通过设置防撞组件与缓冲组件,实现对扫地机器人本体的防护,相较于传统的结构,本装置通过卡环套设在安装柱外侧,使支撑弹簧的弹力对限位块进行支撑,限位块与套板内壁通槽之间形成缓冲空间,护栏设置在扫地机器人本体外侧,可对扫地机器人本体进行有效的撞击防护效果,避免造成外壳发生晃动会倾倒,同时,护栏外侧尽可能贴合在扫地机器人本体边侧,能够降低扫地机器人本体在墙边时的工作时的清理遗漏空间。
12、2、通过设置支撑组件,实现对卡环的快速组装,本装置通过卡环扣接在安装柱外侧,使导向块能够内嵌在卡环内壁的导槽内部,同时轴套插设在安装柱的通孔内部,使卡板插设在外壳的卡槽内部并转动,从而使旋盖对卡环进行扣押,保证了卡环安装后的稳固性。
技术特征:
1.一种防撞的智能扫地机器人,包括扫地机器人本体(1),其特征在于,所述扫地机器人本体(1)包括外壳(11),所述外壳(11)顶端中心位置处连接有安装柱(12),且所述安装柱(12)外侧套设安装有缓冲组件(3),所述缓冲组件(3)包括卡环(31),所述卡环(31)左右两侧对称连接有两个套板(32),且所述套板(32)外侧插设有内板(33),所述内板(33)左右两侧设置有防撞组件(2),所述防撞组件(2)包括护栏(21),所述护栏(21)呈c形结构设计。
2.根据权利要求1所述的一种防撞的智能扫地机器人,其特征在于,所述护栏(21)两端侧套设有橡胶套(24),所述橡胶套(24)外侧等距开设有竖槽,所述护栏(21)外侧中心位置处连接有橡胶块(22),所述护栏(21)顶端连接有固定块(23),所述固定块(23)通过螺栓与内板(33)对接固定。
3.根据权利要求1所述的一种防撞的智能扫地机器人,其特征在于,所述套板(32)顶端右侧通过螺纹孔插设有锁止螺栓(36),且所述锁止螺栓(36)底端通过凹槽抵触在内板(33)表面。
4.根据权利要求3所述的一种防撞的智能扫地机器人,其特征在于,所述内板(33)左侧连接有限位块(34),且所述限位块(34)通过通槽内嵌在套板(32)内部,所述限位块(34)左侧连接有支撑弹簧(35),且所述支撑弹簧(35)左侧与套板(32)的通槽内壁相连接固定。
5.根据权利要求1所述的一种防撞的智能扫地机器人,其特征在于,所述安装柱(12)正反两侧对称连接有两个导向块(13),且所述导向块(13)通过导槽插设在卡环(31)内壁。
6.根据权利要求1所述的一种防撞的智能扫地机器人,其特征在于,所述安装柱(12)顶端设置有支撑组件(4),所述支撑组件(4)包括旋盖(41),所述旋盖(41)底端边侧对称连接有两个卡板(43),且所述卡板(43)通过卡槽内嵌在外壳(11)内部。
7.根据权利要求6所述的一种防撞的智能扫地机器人,其特征在于,所述旋盖(41)底端中心位置处设置有稳撑部件(42),所述稳撑部件(42)包括内轴(421),所述内轴(421)底端通过通孔插设在轴套(422)内部,所述内轴(421)底端与轴套(422)通孔内壁之间通过复位弹簧(423)相连接固定。
技术总结
本技术涉及扫地机器人技术领域,尤其涉及一种防撞的智能扫地机器人,包括扫地机器人本体,所述扫地机器人本体包括外壳,所述外壳顶端中心位置处连接有安装柱,且所述安装柱外侧套设安装有缓冲组件,所述缓冲组件包括卡环,所述卡环左右两侧对称连接有两个套板,且所述套板外侧插设有内板,所述内板左右两侧设置有防撞组件,所述防撞组件包括护栏,所述护栏呈C形结构设计。本技术通过卡环套设在安装柱外侧,使支撑弹簧的弹力对限位块进行支撑,限位块与套板内壁通槽之间形成缓冲空间,护栏设置在扫地机器人本体外侧,可对扫地机器人本体进行有效的撞击防护效果,避免造成外壳发生晃动会倾倒。
技术研发人员:张睿扬,周伊凡,郭浩桐
受保护的技术使用者:中国计量大学
技术研发日:20230626
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!