一种可自动洗拖布的扫地机器人的制作方法
本技术涉及卫生清洁辅助产品,具体是一种可自动洗拖布的扫地机器人。
背景技术:
1、在中国专利发布号为cn105769059a中,本发明公开了一种扫地机器人,包括:用于清扫和储存垃圾的主清洁机,主清洁机包括第一发射装置;用于移动垃圾的子清洁机,子清洁机可分离地装设于主清洁机上,子清洁机与主清洁机之间进行无线通讯,子清洁机包括用于接收第一发射装置发出的第一信号的第一接收装置,其中子清洁机的尺寸小于主清洁机的尺寸。根据本发明的扫地机器人,可以将传统的扫地机器人无法扫到的地方清扫到,使扫地机器人的清扫覆盖率大,从而使得扫地机器人实现了全面清扫功能,实用性强。
2、现有的自动洗拖布的扫地机器人存在清洗杆上的清洗柱较少,不能对拖布本体的清洗进行彻底,并且清洗转盘没有清洗的结构,导致清洗转盘与拖布本体相重合的位置遗漏清洗,清洗过程中扫地机器人主体或者拖布安装面板会出现滑动的情况,影响了清洗的进度与质量的问题。
3、因此,针对上述问题提出一种可自动洗拖布的扫地机器人。
技术实现思路
1、为了弥补现有技术的不足,解决了清洗杆上的清洗柱较少,不能对拖布本体的清洗进行彻底,并且清洗转盘没有清洗的结构,导致清洗转盘与拖布本体相重合的位置遗漏清洗,清洗过程中扫地机器人主体或者拖布安装面板会出现滑动的情况,影响了清洗的进度与质量的问题。
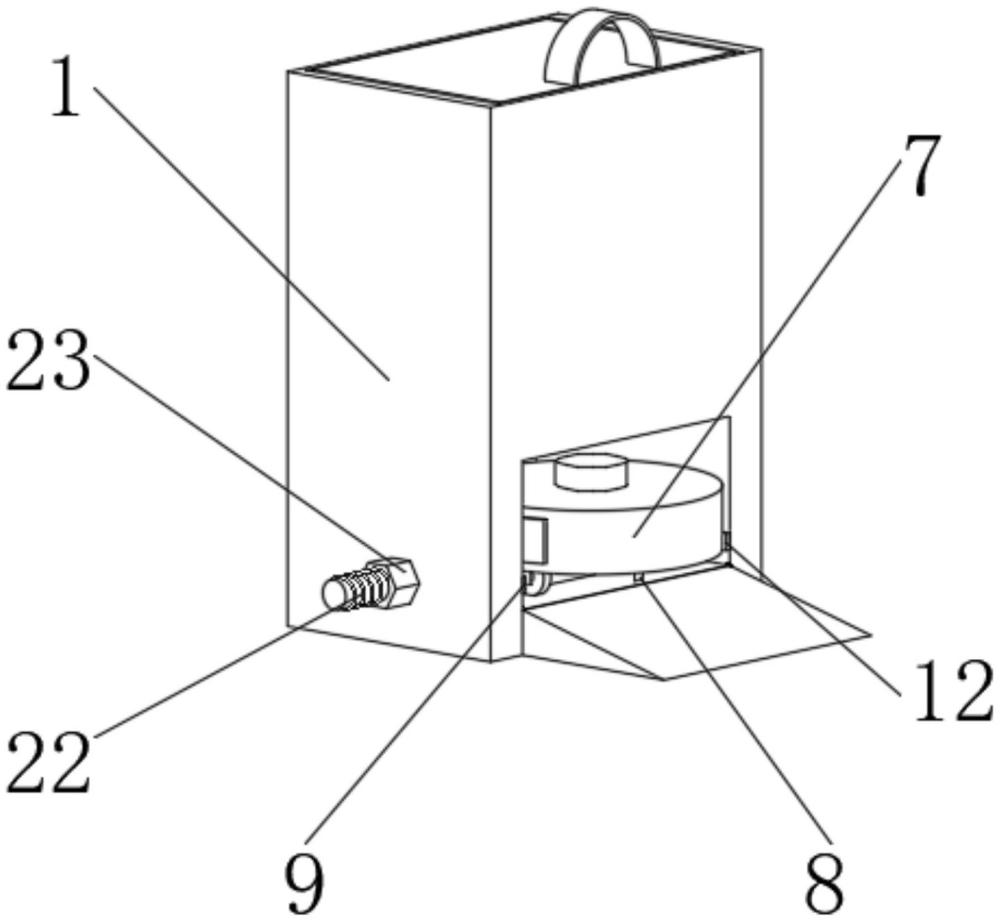
2、本实用新型解决其技术问题所采用的技术方案是:本实用新型所述的一种可自动洗拖布的扫地机器人,包括清洗基站和挡片,所述清洗基站的底部内壁紧密贴合有清洗槽,且清洗槽的内部安装有清洗转盘,所述清洗转盘的外壁焊接连接有清洗杆,且清洗转盘的顶部焊接连接有凸点,并且清洗杆的外壁焊接连接有清洗柱,所述清洗基站的内部设置有扫地机器人主体,且扫地机器人主体的底部安装有第一传感器,所述清洗基站的一侧内壁安装有第二传感器,且第二传感器的边侧设置有第一伸缩杆,并且第一伸缩杆的端部焊接连接有左夹片,所述清洗基站的另一侧内壁安装有第三传感器,且第三传感器的边侧设置有第二伸缩杆,且第二伸缩杆的端部焊接连接有右夹片,所述挡片设置于第一传感器的边侧,且挡片的内部活动连接有活动柱,并且活动柱的端部嵌套有弹簧,所述活动柱的一端外壁紧密贴合有滑片,且滑片的底部焊接连接有拖布安装面板,并且拖布安装面板的底部粘接连接有拖布本体。
3、优选的,所述清洗槽的外壁紧密贴合有固定片,且固定片的另一侧外壁焊接连接有螺杆,并且螺杆的外部螺纹连接有螺帽。
4、优选的,所述清洗柱关于清洗杆的外壁等间距等角度排列设置,且清洗杆关于清洗转盘的外壁等间距等角度排列设置。
5、优选的,所述扫地机器人主体通过第一传感器与第二传感器、第三传感器构成电性连接,且扫地机器人主体通过左夹片、右夹片与清洗基站构成夹紧结构,所述左夹片通过第一传感器、第二传感器与第一伸缩杆构成电性连接,且右夹片通过第一传感器、第三传感器与第二伸缩杆构成电性连接。
6、优选的,所述滑片通过活动柱、弹簧与挡片构成弹性结构,且挡片与滑片之间为滑动连接。
7、优选的,所述清洗槽通过固定片、螺杆、螺帽与清洗基站构成可拆卸结构,且螺杆与清洗基站之间为嵌套连接。
8、本实用新型的有益之处在于:
9、1.本实用新型通过设置有第一伸缩杆、左夹片与第二伸缩杆、右夹片,当扫地机器人主体完成扫地与拖地的命令后,会在激光导航下自动回到清洗基站的内部,当扫地机器人主体底部的第一传感器与第二传感器、第三传感器位于同一高度时,第二传感器、第三传感器分别控制第一伸缩杆、左夹片与第二伸缩杆、右夹片向着扫地机器人主体所在的方向对其进行固定,左夹片与右夹片的形状贴合于扫地机器人主体的,能够将扫地机器人主体固定于清洗基站的内部,防止在清晰地过程中扫地机器人主体发生移动,不能对拖布本体进行更好的清洁;
10、2.本实用新型通过设置有清洗杆、清洗柱与凸点,清洗槽内部的清洗转盘带动清洗杆、清洗柱对拖布本体进行清洗,清洗杆外壁设置的多个清洗柱是为了更好的将拖布本体上的脏污清洗下来,并且清洗转盘顶部的凸点能够对拖布本体的中间位置进行清洗,加大了清洗面积,使得拖布本体被清洗的更完全;
11、3.本实用新型通过设置有清洗杆、清洗柱与凸点,拖布本体是粘接在拖布安装面板的底部的,拖布安装面板的顶部焊接连接有滑片,拖布安装面板通过滑片、挡片、活动柱、弹簧与扫地机器人主体进行固定,此结构能够更好的固定拖布安装面板与拖布本体,防止在清洗拖布本体的过程中,拖布安装面板发生移动,对拖布本体的清洗区域有遗漏,提高了装置的实用性效果。
技术特征:
1.一种可自动洗拖布的扫地机器人,其特征在于:包括清洗基站(1)和挡片(15),所述清洗基站(1)的底部内壁紧密贴合有清洗槽(2),且清洗槽(2)的内部安装有清洗转盘(3),所述清洗转盘(3)的外壁焊接连接有清洗杆(4),且清洗转盘(3)的顶部焊接连接有凸点(6),并且清洗杆(4)的外壁焊接连接有清洗柱(5),所述清洗基站(1)的内部设置有扫地机器人主体(7),且扫地机器人主体(7)的底部安装有第一传感器(8),所述清洗基站(1)的一侧内壁安装有第二传感器(9),且第二传感器(9)的边侧设置有第一伸缩杆(10),并且第一伸缩杆(10)的端部焊接连接有左夹片(11),所述清洗基站(1)的另一侧内壁安装有第三传感器(12),且第三传感器(12)的边侧设置有第二伸缩杆(13),且第二伸缩杆(13)的端部焊接连接有右夹片(14),所述挡片(15)设置于第一传感器(8)的边侧,且挡片(15)的内部活动连接有活动柱(16),并且活动柱(16)的端部嵌套有弹簧(17),所述活动柱(16)的一端外壁紧密贴合有滑片(18),且滑片(18)的底部焊接连接有拖布安装面板(19),并且拖布安装面板(19)的底部粘接连接有拖布本体(20)。
2.根据权利要求1所述的一种可自动洗拖布的扫地机器人,其特征在于:所述清洗槽(2)的外壁紧密贴合有固定片(21),且固定片(21)的另一侧外壁焊接连接有螺杆(22),并且螺杆(22)的外部螺纹连接有螺帽(23)。
3.根据权利要求1所述的一种可自动洗拖布的扫地机器人,其特征在于:所述清洗柱(5)关于清洗杆(4)的外壁等间距等角度排列设置,且清洗杆(4)关于清洗转盘(3)的外壁等间距等角度排列设置。
4.根据权利要求1所述的一种可自动洗拖布的扫地机器人,其特征在于:所述扫地机器人主体(7)通过第一传感器(8)与第二传感器(9)、第三传感器(12)构成电性连接,且扫地机器人主体(7)通过左夹片(11)、右夹片(14)与清洗基站(1)构成夹紧结构,所述左夹片(11)通过第一传感器(8)、第二传感器(9)与第一伸缩杆(10)构成电性连接,且右夹片(14)通过第一传感器(8)、第三传感器(12)与第二伸缩杆(13)构成电性连接。
5.根据权利要求1所述的一种可自动洗拖布的扫地机器人,其特征在于:所述滑片(18)通过活动柱(16)、弹簧(17)与挡片(15)构成弹性结构,且挡片(15)与滑片(18)之间为滑动连接。
6.根据权利要求2所述的一种可自动洗拖布的扫地机器人,其特征在于:所述清洗槽(2)通过固定片(21)、螺杆(22)、螺帽(23)与清洗基站(1)构成可拆卸结构,且螺杆(22)与清洗基站(1)之间为嵌套连接。
技术总结
本技术属于卫生清洁辅助产品技术领域,具体地说是一种可自动洗拖布的扫地机器人,包括清洗基站和挡片,所述清洗基站的底部内壁紧密贴合有清洗槽,且清洗槽的内部安装有清洗转盘,所述清洗转盘的外壁焊接连接有清洗杆,且清洗转盘的顶部焊接连接有凸点,并且清洗杆的外壁焊接连接有清洗柱,所述清洗基站的内部安装有扫地机器人主体,且扫地机器人主体的底部安装有第一传感器;本技术清洗杆上的清洗柱设置较多,能够对拖布本体的清洗进行彻底,并且清洗转盘设置有清洗的结构,清洗转盘与拖布本体相重合的位置也能够被清洗,清洗过程中扫地机器人主体或者拖布安装面板不会出现滑动的情况,加快了清洗的进度,提高了清洗的质量。
技术研发人员:付浩,候亚伟,魏星君,孙延伟
受保护的技术使用者:陕西宏欣宁科技有限公司
技术研发日:20230704
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!