一种扫地机器人用便于拆卸边刷结构的制作方法
本技术涉及扫地机器人领域,具体为一种扫地机器人用便于拆卸边刷结构。
背景技术:
1、机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透,扫地机器人长时间工作后,起到清扫作用的边刷因长时间的磨损需要更换,现有的便于拆卸的边刷结构如公开号cn218684133u的一种便于扫地机器人刷体更换的结构,包括机器人本体以及安装在其底面的边刷;拆卸件,设置于边刷的内部,拆卸件包括转动连接在导向杆内部的圆轴,圆轴的下端固定安装有转盘,且转盘通过连接件与导向杆的内壁进行连接,转盘的表面开设有多组滑槽,滑槽通过限位柱滑动连接有卡块,卡块的表面开设有第二斜面。
2、边刷通常是安装在驱动边刷的基点上的,边刷在使用过程中是转动的,而边刷在转动过程中,可能会带动转盘转动,导致凸起脱离凹槽,使得边刷会松动,影响机器人工作效果,为此我们提出一种扫地机器人用便于拆卸边刷结构。
技术实现思路
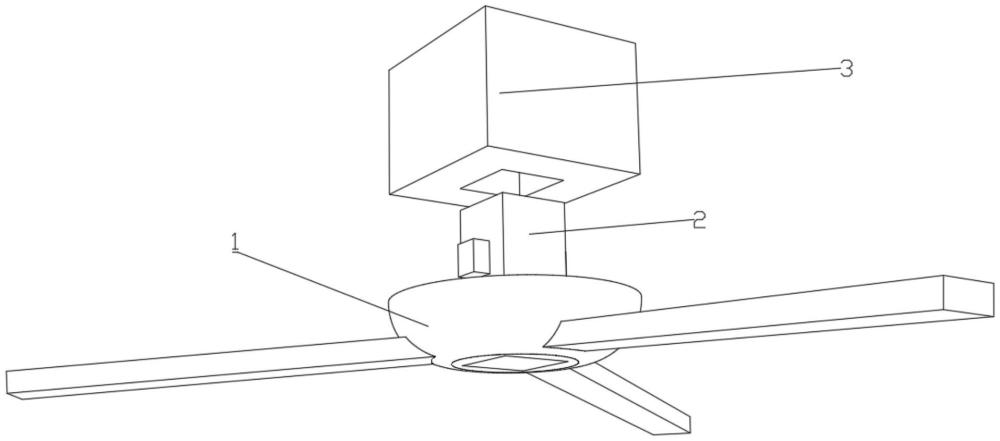
1、本实用新型的目的在于提供一种扫地机器人用便于拆卸边刷结构,包括边刷,所述边刷内侧固定安装有固定盒,所述固定盒活动卡接在定位盒中,所述定位盒可拆卸安装在机器人的驱动边刷的基点上,所述固定盒内壁上转动连接转轴,所述转轴上固定套接齿轮,所述齿轮上齿合驱动组件,所述齿轮上齿合固定组件。
2、优选的:所述驱动组件包括挤压板,所述挤压板固定连接两组齿条一的一端,所述齿条一的另一端固定连接弹簧一的一端,所述弹簧一的另一端固定连接固定盒内壁,两组所述齿条一均齿合齿轮。
3、优选的:所述固定组件包括两组固定块,两组所述固定块相靠近的一端均固定连接一组齿条二,所述齿条二的一端固定连接限位条,所述限位条可滑动贯穿一组固定块内侧并延伸到固定块内部,两组所述固定块之间安装有多组弹簧二,两组所述齿条二均齿合齿轮,所述固定块均活动贯穿固定盒。
4、优选的:所述齿条一侧壁上均固定连接导向条,所述导向条内侧活动贯穿设有导向杆,所述导向杆的两端均固定连接在固定盒内壁上。
5、优选的:所述固定块的顶部和底部均固定连接一组限位块,同一高度的两组所述限位块内侧活动贯穿设有同一组限位杆,所述限位杆的两端均互动连接在固定盒内壁上。
6、优选的:所述挤压板活动贯穿固定盒内侧,所述挤压板位于固定盒的一端上固定连接磁块一,所述磁块一可吸附连接磁块二,所述磁块二固定连接在固定盒内壁上。
7、优选的:两组所述固定块可分别卡进定位盒内侧开设的两组固定槽中。
8、与现有技术相比,本实用新型的有益效果是:
9、本实用新型通过按压挤压板,带动两组齿条一位移,齿条一位移会带动齿轮转动,齿轮转动带动两组齿条二位移,齿条二位移带动两组固定块相互靠近位移,使得固定块脱离固定槽,从而可以将固定盒从定位盒抽出来,从而将边刷拆卸下来;重新安装边刷时,同样挤压挤压板,使得固定块收缩,方便将固定盒插入定位盒中,然后松开挤压板,此时压缩状态下的弹簧一和弹簧二会自动复位,从而将固定块插入固定槽中,使得固定盒与定位盒之间被稳定固定住;磁块一可吸附连接磁块二,使得安装后的挤压板结构稳定,再通过多组弹簧一和弹簧二的支撑,使得边刷在转动过程中,固定盒不会从定位盒脱离出来,影响扫地机器人的正常工作。
技术特征:
1.一种扫地机器人用便于拆卸边刷结构,包括边刷(1),其特征在于:所述边刷(1)内侧固定安装有固定盒(2),所述固定盒(2)活动卡接在定位盒(3)中,所述定位盒(3)可拆卸安装在机器人的驱动边刷的基点上,所述固定盒(2)内壁上转动连接转轴(4),所述转轴(4)上固定套接齿轮(5),所述齿轮(5)上齿合驱动组件(6),所述齿轮(5)上齿合固定组件(7)。
2.根据权利要求1所述的一种扫地机器人用便于拆卸边刷结构,其特征在于:所述驱动组件(6)包括挤压板(601),所述挤压板(601)固定连接两组齿条一(602)的一端,所述齿条一(602)的另一端固定连接弹簧一(603)的一端,所述弹簧一(603)的另一端固定连接固定盒(2)内壁,两组所述齿条一(602)均齿合齿轮(5)。
3.根据权利要求1所述的一种扫地机器人用便于拆卸边刷结构,其特征在于:所述固定组件(7)包括两组固定块(701),两组所述固定块(701)相靠近的一端均固定连接一组齿条二(702),所述齿条二(702)的一端固定连接限位条(703),所述限位条(703)可滑动贯穿一组固定块(701)内侧并延伸到固定块(701)内部,两组所述固定块(701)之间安装有多组弹簧二(704),两组所述齿条二(702)均齿合齿轮(5),所述固定块(701)均活动贯穿固定盒(2)。
4.根据权利要求2所述的一种扫地机器人用便于拆卸边刷结构,其特征在于:所述齿条一(602)侧壁上均固定连接导向条(8),所述导向条(8)内侧活动贯穿设有导向杆(9),所述导向杆(9)的两端均固定连接在固定盒(2)内壁上。
5.根据权利要求3所述的一种扫地机器人用便于拆卸边刷结构,其特征在于:所述固定块(701)的顶部和底部均固定连接一组限位块(10),同一高度的两组所述限位块(10)内侧活动贯穿设有同一组限位杆(11),所述限位杆(11)的两端均互动连接在固定盒(2)内壁上。
6.根据权利要求2所述的一种扫地机器人用便于拆卸边刷结构,其特征在于:所述挤压板(601)活动贯穿固定盒(2)内侧,所述挤压板(601)位于固定盒(2)的一端上固定连接磁块一(12),所述磁块一(12)可吸附连接磁块二(13),所述磁块二(13)固定连接在固定盒(2)内壁上。
7.根据权利要求3所述的一种扫地机器人用便于拆卸边刷结构,其特征在于:两组所述固定块(701)可分别卡进定位盒(3)内侧开设的两组固定槽(14)中。
技术总结
本技术涉及扫地机器人领域,具体为一种扫地机器人用便于拆卸边刷结构,包括边刷,所述边刷内侧固定安装有固定盒,所述固定盒活动卡接在定位盒中,所述定位盒可拆卸安装在机器人的驱动边刷的基点上,所述固定盒内壁上转动连接转轴,所述转轴上固定套接齿轮,所述齿轮上齿合驱动组件,所述齿轮上齿合固定组件,本技术通过按压挤压板,带动两组齿条一位移,齿条一位移会带动齿轮转动,齿轮转动带动两组齿条二位移,齿条二位移带动两组固定块相互靠近位移,使得固定块脱离固定槽,从而将边刷拆卸下来;磁块一可吸附连接磁块二,再通过多组弹簧一和弹簧二的支撑,使得边刷在转动过程中,固定盒不会从定位盒脱离出来。
技术研发人员:邹历
受保护的技术使用者:微智盛科技(深圳)有限公司
技术研发日:20230705
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!