一种扫地机器人用便于拆装拖布的制作方法
本技术涉及扫地机器人,具体是一种扫地机器人用便于拆装拖布。
背景技术:
1、依托智能化技术的发展,智能家居概念越来越热,各种自动扫地机器人不断涌现,扫地机器人能凭借一定的人工智能,自动在房间内完成地板清理工作,给用户带来了极大的便利,很大程度上解决了用户因工作忙没时间打扫卫生的问题,但是扫地机器人的清扫拖布在长时间清理工作后,需要更换拖布,而且需要向储水盒中添水,但是现有的扫地机器人更换拖布以及加水的方式较为烦琐。
2、现有技术中的专利号为cn213345511 u的专利公开了一种便于更换拖布的扫地机器人,包括机器人本体,所述机器人本体四周可拆卸连接有若干个等距分布的缓冲层,所述机器人本体底面设有六个环形分布的吸尘口,所述机器人本体底面设有铲灰圈,所述机器人本体底面中间位置可拆卸连接有拖地盘,所述固定盘上端面固定连接有六个环形分布的插接弧板,所述机器人本体底面开设有六个与所述插接弧板相配合的限位盲槽;机器人本体边缘通过缓冲层的保护,吸尘口遗漏的灰尘颗粒通过铲灰圈进行推动,使灰尘始终位于吸尘口下方,进而使吸尘口可以吸附,只需要将固定盘顺时针转动,即可将拖地盘与机器人本体进行分离,提高了拆卸速度。
3、但是现有技术中的专利存在以下缺点:拖布结构通过转动卡接的方式和扫地机器人连接,可能会在使用过程中,扫地机器人移动使得拖布结构和地面接触摩擦导致拖布结构掉落,无法使用。
技术实现思路
1、本实用新型要解决的技术问题就是克服以上的技术缺陷,提供一种扫地机器人用便于拆装拖布方便安装拆卸拖布和集尘箱,便于清洁扫地机器人。
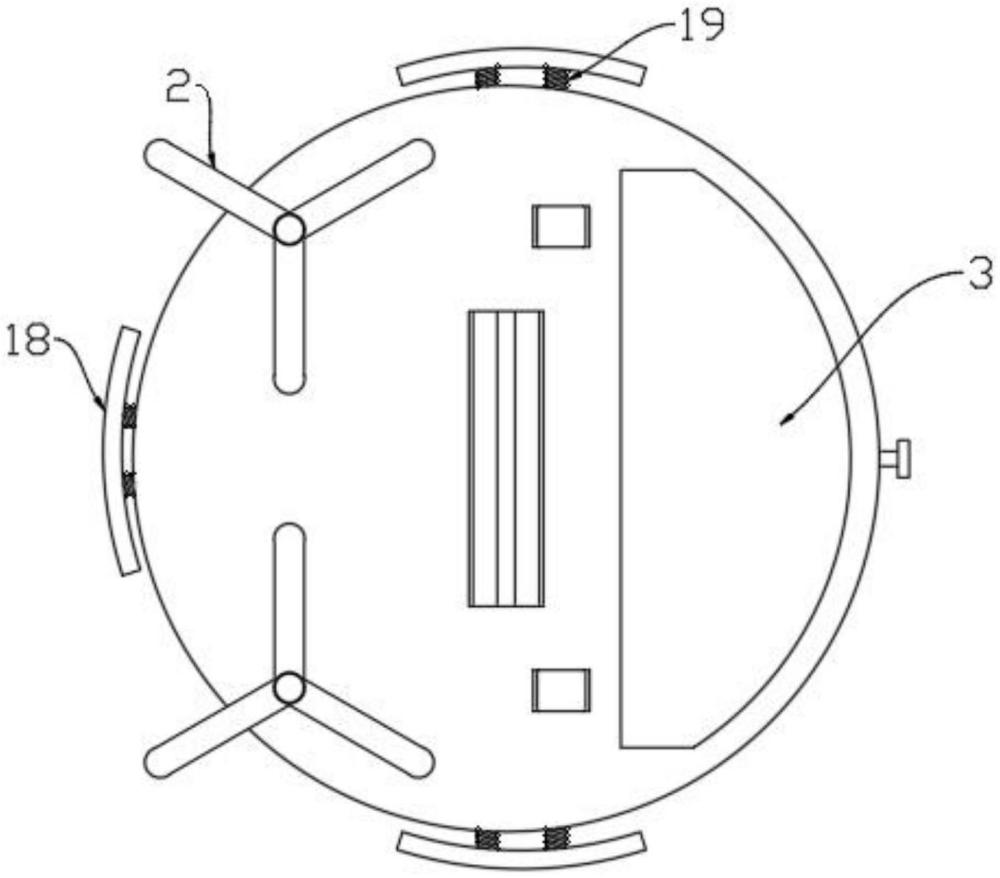
2、为了解决上述问题,本实用新型的技术方案为:一种扫地机器人用便于拆装拖布,包括扫地机器人本体,所述扫地机器人本体,所述扫地机器人本体下端一侧对称设有清洁刷,所述扫地机器人本体下端另一侧设有拖布,所述拖布上端设有集尘箱,所述拖布上端粘接集尘箱下端,所述集尘箱上端设有凹槽,所述凹槽内部两端设有限位板,两个所述限位板内部设有连接槽,所述连接槽内部设有插杆,所述插杆插接集尘箱,两个所述插杆相互靠近一端设有连接块,所述插杆表面设有弹簧一,两个所述连接块之间设有压块,所述压块上端设有移动柱,所述移动柱内部设有螺杆,所述螺杆上端设有连接杆,所述连接杆上端转动连接扫地机器人本体内部上端,所述扫地机器人本体靠近集尘箱处设有调节结构。
3、进一步,所述调节结构包括转动杆,所述转动杆贯穿扫地机器人本体,所述转动杆位于扫地机器人本体外部一端设有转盘,所述转动杆另一端设有主动锥齿轮,所述连接杆上端外端套设有从动锥齿轮。
4、进一步,所述扫地机器人本体侧端设有防护板,所述防护板有三个,三个所述防护板和扫地机器人本体之间设有弹簧二。
5、进一步,所述弹簧一一端固定连接限位板,所述弹簧一另一端固定连接于连接块。
6、进一步,所述压块截面为等腰梯形,两个所述连接块靠近压块一端为斜面,所述压块与连接块相互贴合。
7、进一步,所述主动锥齿轮啮合连接从动锥齿轮。
8、本实用新型与现有的技术相比的优点在于:本实用新型通过安装插杆、连接块、弹簧一、压块可以使得集尘箱和拖布安装更加稳定,不易发生掉落,通过安装转盘、转动杆、主动锥齿轮、从动锥齿轮可以方便集尘箱和拖布的安装拆卸,方便清理集尘箱和更换拖布。
技术特征:
1.一种扫地机器人用便于拆装拖布,其特征在于:包括扫地机器人本体(1),所述扫地机器人本体(1),所述扫地机器人本体(1)下端一侧对称设有清洁刷(2),所述扫地机器人本体(1)下端另一侧设有拖布(3),所述拖布(3)上端设有集尘箱(4),所述拖布(3)上端粘接集尘箱(4)下端,所述集尘箱(4)上端设有凹槽,所述凹槽内部两端设有限位板(5),两个所述限位板(5)内部设有连接槽,所述连接槽内部设有插杆(6),所述插杆(6)插接集尘箱(4),两个所述插杆(6)相互靠近一端设有连接块(7),所述插杆(6)表面设有弹簧一(8),两个所述连接块(7)之间设有压块(9),所述压块(9)上端设有移动柱(10),所述移动柱(10)内部设有螺杆(12),所述螺杆(12)上端设有连接杆(11),所述连接杆(11)上端转动连接扫地机器人本体(1)内部上端,所述扫地机器人本体(1)靠近集尘箱(4)处设有调节结构(13)。
2.根据权利要求1所述的一种扫地机器人用便于拆装拖布,其特征在于:所述调节结构(13)包括转动杆(15),所述转动杆(15)贯穿扫地机器人本体(1),所述转动杆(15)位于扫地机器人本体(1)外部一端设有转盘(14),所述转动杆(15)另一端设有主动锥齿轮(16),所述连接杆(11)上端外端套设有从动锥齿轮(17)。
3.根据权利要求1所述的一种扫地机器人用便于拆装拖布,其特征在于:所述扫地机器人本体(1)侧端设有防护板(18),所述防护板(18)有三个,三个所述防护板(18)和扫地机器人本体(1)之间设有弹簧二(19)。
4.根据权利要求1所述的一种扫地机器人用便于拆装拖布,其特征在于:所述弹簧一(8)一端固定连接限位板(5),所述弹簧一(8)另一端固定连接于连接块(7)。
5.根据权利要求1所述的一种扫地机器人用便于拆装拖布,其特征在于:所述压块(9)截面为等腰梯形,两个所述连接块(7)靠近压块(9)一端为斜面,所述压块(9)与连接块(7)相互贴合。
6.根据权利要求2所述的一种扫地机器人用便于拆装拖布,其特征在于:所述主动锥齿轮(16)啮合连接从动锥齿轮(17)。
技术总结
本技术公开了一种扫地机器人用便于拆装拖布,包括扫地机器人本体,扫地机器人本体,扫地机器人本体下端一侧对称设有清洁刷,扫地机器人本体下端另一侧设有拖布,拖布上端设有集尘箱,拖布上端粘接集尘箱下端,集尘箱上端设有凹槽,凹槽内部两端设有限位板,两个限位板内部设有连接槽,连接槽内部设有插杆,插杆插接集尘箱,两个插杆相互靠近一端设有连接块,插杆表面设有弹簧一,两个连接块之间设有压块,压块上端设有移动柱,移动柱内部设有螺杆,螺杆上端设有连接杆,扫地机器人本体靠近集尘箱处设有调节结构。本技术与现有的技术相比的优点在于:方便安装拆卸拖布和集尘箱,便于清洁扫地机器人。
技术研发人员:谯正云
受保护的技术使用者:东莞市合杰精密模具有限公司
技术研发日:20230807
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!