清洁机器人及清洁机器人的控制方法与流程
本发明涉及清洁设备,特别涉及一种清洁机器人及清洁机器人的控制方法。
背景技术:
1、清洁机器人是一种可以自动或半自动地对各种表面进行清洁的清洁设备。例如,有的清洁机器人可以对地面进行扫地、拖地、吸尘等,有的清洁机器人可以对墙壁、窗户、天花板等进行擦拭、喷洒等。
2、其中,擦窗机是一种可以对窗户玻璃进行清洁的清洁机器人。擦窗机能够在垂直的玻璃表面上稳定地吸附和移动,以完成清洁任务。现有的擦窗机大多采用负压装置来实现吸附功能,即在清洁机器人的主体设置负压风机或负压泵,负压风机或负压泵产生负压使清洁机器人的清洁盘与玻璃表面紧密贴合,以对玻璃表面进行擦拭。
3、然而,清洁盘一般为圆形或椭圆形,由于清洁盘的形状限制,清洁机器人在清洁窗户的边角时,往往会出现漏擦的情况,导致清洁效果不佳。
技术实现思路
1、本发明的主要目的在于提出一种清洁机器人,能够增大清洁机器人的清洁范围,以减少漏擦的情况,提升清洁效果。
2、为实现上述目的,本发明采用了如下的技术方案:
3、一种清洁机器人,包括:
4、机器人主体;
5、第一类清洁组件,可转动地连接于所述机器人主体,所述第一类清洁组件转动以带动所述机器人主体移动并清洁待清洁面;
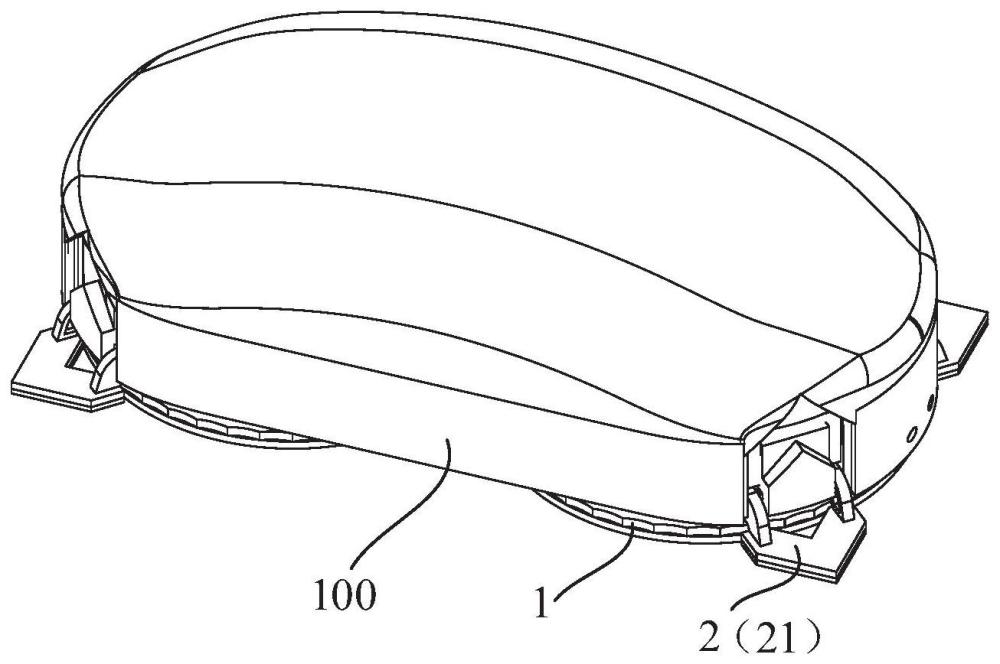
6、第二类清洁组件,设于所述机器人主体,且用于凸出于所述机器人主体,以增大所述清洁机器人的清洁范围。
7、在一些实施例中,所述第二类清洁组件具有凸出状态和收起状态,所述第二类清洁组件可在所述凸出状态与所述收起状态之间切换,所述第二类清洁组件在所述凸出状态与所述收起状态下至少一个可增大所述清洁机器人的清洁范围。
8、在一些实施例中,所述第二类清洁组件在凸出状态下可伸入到待清洁面的角落区域以对待清洁面的角落区域进行清洁;
9、所述第二类清洁组件在收起状态下可接触到待清洁面的边框区域以对待清洁面的边框区域进行清洁。
10、在一些实施例中,所述凸出状态包括:所述第二类清洁组件从所述机器人主体上脱离后直至翻转到待清洁面上的任一状态;
11、或者,所述凸出状态包括:所述第二类清洁组件从所述机器人主体内部开始伸出到外界直至完全伸出到外界的任一状态。
12、在一些实施例中,所述第二类清洁组件在所述凸出状态下,且所述第二类清洁组件与待清洁面接触后,所述第二类清洁组件还用于在所述待清洁面上沿着不同的方向进行往复擦拭运动;
13、或者,所述第二类清洁组件在所述收起状态下,且所述第二类清洁组件与边框区域接触后,所述第二类清洁组件还用于在所述边框区域上沿着不同的方向进行往复擦拭运动。
14、在一些实施例中,所述清洁机器人还包括调节组件,所述调节组件用于根据所述清洁机器人的运行状态控制所述第二类清洁组件在所述凸出状态与所述收起状态之间切换。
15、在一些实施例中,所述第二类清洁组件设置多个,多个第二类清洁组件设置在所述机器人主体的不同朝向上,多个所述第二类清洁组件用于清洁待清洁面的不同位置,以增大所述清洁机器人不同方向的清洁范围。
16、在一些实施例中,所述调节组件包括万向结构,所述万向结构用于控制不同朝向的至少两个第二类清洁组件同时凸出所述机器人主体。
17、在一些实施例中,所述第二类清洁组件包括清洁件,所述清洁件包括至少两个相互接触或相互连接的清洁边,至少两个所述清洁边之间于接触处或连接处形成有夹角,以可适应伸入到不同形态的待清洁面,以增大清洁机器人的清洁范围。
18、在一些实施例中,所述第一类清洁组件包括:
19、行走盘,可转动地连接于所述机器人主体,所述行走盘转动以带动所述机器人主体移动;
20、清洁盘,设于所述行走盘的周侧,所述清洁盘转动以对待清洁面进行清洁。
21、在一些实施例中,所述第一类清洁组件上形成有吸附空间,所述清洁机器人还包括:负压组件,用于对所述吸附空间抽负压,使清洁机器人吸附于待清洁面。
22、本发明还提出一种清洁机器人的控制方法,所述清洁机器人包括:机器人主体;
23、第一类清洁组件,可转动地连接于所述机器人主体,所述第一类清洁组件转动以带动所述机器人主体移动并清洁待清洁面;
24、第二类清洁组件,设于所述机器人主体,且可凸出于所述机器人主体;
25、所述控制方法包括:
26、控制所述第一类清洁组件转动以使所述清洁机器人行走并清洁待清洁面;
27、在识别到所述待清洁面的角落区域时,控制所述第二类清洁组件凸出于所述机器人主体,使第二类清洁组件与待清洁面角落区域接触,以对待清洁面的角落区域进行清洁。
28、在一些实施例中,所述控制方法包括:在识别到所述待清洁面的边框区域时,控制所述第二类清洁组件与待清洁面边框区域接触,以对待清洁面的角落区域进行清洁。
29、在一些实施例中,所述控制方法还包括:所述第二类清洁组件与待清洁面接触后,控制所述第二类清洁组件在待清洁面上沿着不同的方向进行往复擦拭运动;
30、或者,所述第二类清洁组件与边框区域接触后,控制所述第二类清洁组件在边框区域上沿着不同的方向进行往复擦拭运动。
31、本发明还提出另一种清洁机器人,包括:
32、机器人主体;
33、第一类清洁组件,连接于所述机器人主体,所述第一类清洁组件以第一类清洁方式清洁待清洁面;
34、第二类清洁组件,连接于所述机器人主体,所述第二类清洁组件以第二类清洁方式清洁待清洁面;
35、第一类清洁方式与第二类清洁方式不同。
36、在一些实施例中,所述第一类清洁方式与所述第二类清洁方式均包括平动清洁、转动清洁以及抖动清洁的至少一种。
37、在一些实施例中,第一类清洁组件可转动地连接于所述机器人主体,所述第一类清洁方式包括:所述第一类清洁组件以转动式状态清洁待清洁面;所述第二类清洁组件可凸出于所述清洁机器人主体,所述第二类清洁方式包括:所述第二类清洁组件以运动式状态清洁待清洁面。
38、在一些实施例中,所述第二类清洁组件具有凸出状态和收起状态,所述第二类清洁组件可在所述凸出状态与所述收起状态之间切换,所述第二类清洁组件在所述凸出状态和所述收起状态的任一状态均可以第二类清洁方式进行清洁。
39、本发明的清洁机器人中,第一类清洁组件可转动带动机器人主体行走的同时清洁待清洁面,在机器人主体靠近待清洁面的边角时,例如窗户玻璃的边角,第二类清洁组件可凸出于机器人主体,以增大清洁机器人的清洁范围,使得第二类清洁组件能够接触待清洁面的边角,并对待清洁面的边角进行清洁,进而减少漏擦的情况,提升清洁效果。
技术特征:
1.一种清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述第二类清洁组件具有凸出状态和收起状态,所述第二类清洁组件可在所述凸出状态与所述收起状态之间切换,所述第二类清洁组件在所述凸出状态与所述收起状态下至少一个可增大所述清洁机器人的清洁范围。
3.根据权利要求2所述的清洁机器人,其特征在于,所述第二类清洁组件在凸出状态下可伸入到待清洁面的角落区域以对待清洁面的角落区域进行清洁;
4.根据权利要求2所述的清洁机器人,其特征在于,所述凸出状态包括:所述第二类清洁组件从所述机器人主体上脱离后直至翻转到待清洁面上的任一状态;
5.根据权利要求2所述的清洁机器人,其特征在于,所述第二类清洁组件在所述凸出状态下,且所述第二类清洁组件与待清洁面接触后,所述第二类清洁组件还用于在所述待清洁面上沿着不同的方向进行往复擦拭运动;
6.根据权利要求2所述的清洁机器人,其特征在于,所述清洁机器人还包括调节组件,所述调节组件用于根据所述清洁机器人的运行状态控制所述第二类清洁组件在所述凸出状态与所述收起状态之间切换。
7.根据权利要求6所述的清洁机器人,其特征在于,所述第二类清洁组件设置多个,多个第二类清洁组件设置在所述机器人主体的不同朝向上,多个所述第二类清洁组件用于清洁待清洁面的不同位置,以增大所述清洁机器人不同方向的清洁范围。
8.根据权利要求7所述的清洁机器人,其特征在于,所述调节组件包括万向结构,所述万向结构用于控制不同朝向的至少两个第二类清洁组件同时凸出所述机器人主体。
9.根据权利要求1-8任一项所述的清洁机器人,其特征在于,所述第二类清洁组件包括清洁件,所述清洁件包括至少两个相互接触或相互连接的清洁边,至少两个所述清洁边之间于接触处或连接处形成有夹角,以可适应伸入到不同形态的待清洁面,以增大清洁机器人的清洁范围。
10.根据权利要求1所述的清洁机器人,其特征在于,所述第一类清洁组件包括:
11.根据权利要求1所述的清洁机器人,其特征在于,所述第一类清洁组件上形成有吸附空间,所述清洁机器人还包括:负压组件,用于对所述吸附空间抽负压,使清洁机器人吸附于待清洁面。
12.一种清洁机器人的控制方法,其特征在于,所述清洁机器人包括:
13.根据权利要求12所述的清洁机器人的控制方法,其特征在于,所述控制方法包括:在识别到所述待清洁面的边框区域时,控制所述第二类清洁组件与待清洁面边框区域接触,以对待清洁面的角落区域进行清洁。
14.根据权利要求12所述的清洁机器人的控制方法,其特征在于,所述控制方法还包括:所述第二类清洁组件与待清洁面接触后,控制所述第二类清洁组件在待清洁面上沿着不同的方向进行往复擦拭运动;
15.一种清洁机器人,其特征在于,包括:
16.根据权利要求15所述的清洁机器人,其特征在于,所述第一类清洁方式与所述第二类清洁方式均包括平动清洁、转动清洁以及抖动清洁的至少一种。
17.根据权利要求16所述的清洁机器人,其特征在于,第一类清洁组件可转动地连接于所述机器人主体,所述第一类清洁方式包括:所述第一类清洁组件以转动式状态清洁待清洁面;所述第二类清洁组件可凸出于所述清洁机器人主体,所述第二类清洁方式包括:所述第二类清洁组件以运动式状态清洁待清洁面。
18.根据权利要求15所述的清洁机器人,其特征在于,所述第二类清洁组件具有凸出状态和收起状态,所述第二类清洁组件可在所述凸出状态与所述收起状态之间切换,所述第二类清洁组件在所述凸出状态和所述收起状态的任一状态均可以第二类清洁方式进行清洁。
技术总结
本发明公开了一种清洁机器人及清洁机器人的控制方法,涉及清洁设备技术领域。其中,清洁机器人包括机器人主体、第一类清洁组件和第二类清洁组件。第一类清洁组件可转动地连接于机器人主体,第一类清洁组件转动以带动机器人主体移动并清洁待清洁面;第二类清洁组件设于机器人主体,且可凸出于机器人主体,以增大所述清洁机器人的清洁范围。在机器人主体靠近待清洁面的边角时,例如窗户玻璃的边角,第二类清洁组件可凸出于机器人主体,以增大清洁机器人的清洁范围,使得第二类清洁组件能够接触待清洁面的边角,并对待清洁面的边角进行清洁,进而减少漏擦的情况,提升清洁效果。
技术研发人员:鲁晓昆,韩卫庆,游延伟,牛立群,蒲勇,剧锦斌,陶铸,赵婧
受保护的技术使用者:山西嘉世达机器人技术有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!