清洁机器人及其控制方法与流程
本公开涉及清洁设备,具体涉及一种清洁机器人及其控制方法。
背景技术:
1、清洁机器人,是智能家用清洁电器的一种,能凭借一定的人工智能,自动在地面上完成清扫、吸尘、擦地工作。随着科学技术的进步和人们生活品质的提升,清洁机器人已经走进越来越多人的生活。
2、市面上的清洁机器人在贴近墙边工作时,往往难以实现零距离贴边,从而导致存在清洁死角。现有技术中,可以通过电机带动机械臂将例如抹布盘的清洁器摆动至运动底盘的外侧,从而实现拖地到边的目的。然而,摆动至运动底盘外侧的清洁器容易撞击或剐蹭障碍物,这导致了用户的体验较差。提供一种能够提前避障的清洁机器人是本公开亟待解决的技术问题。
技术实现思路
1、本公开为了解决现有技术中存在的问题,提供了一种清洁机器人及其控制方法。
2、根据本公开的第一方面,提供了一种清洁机器人,所述清洁机器人包括:
3、运动底盘,所述运动底盘被配置为在工作面上行走;
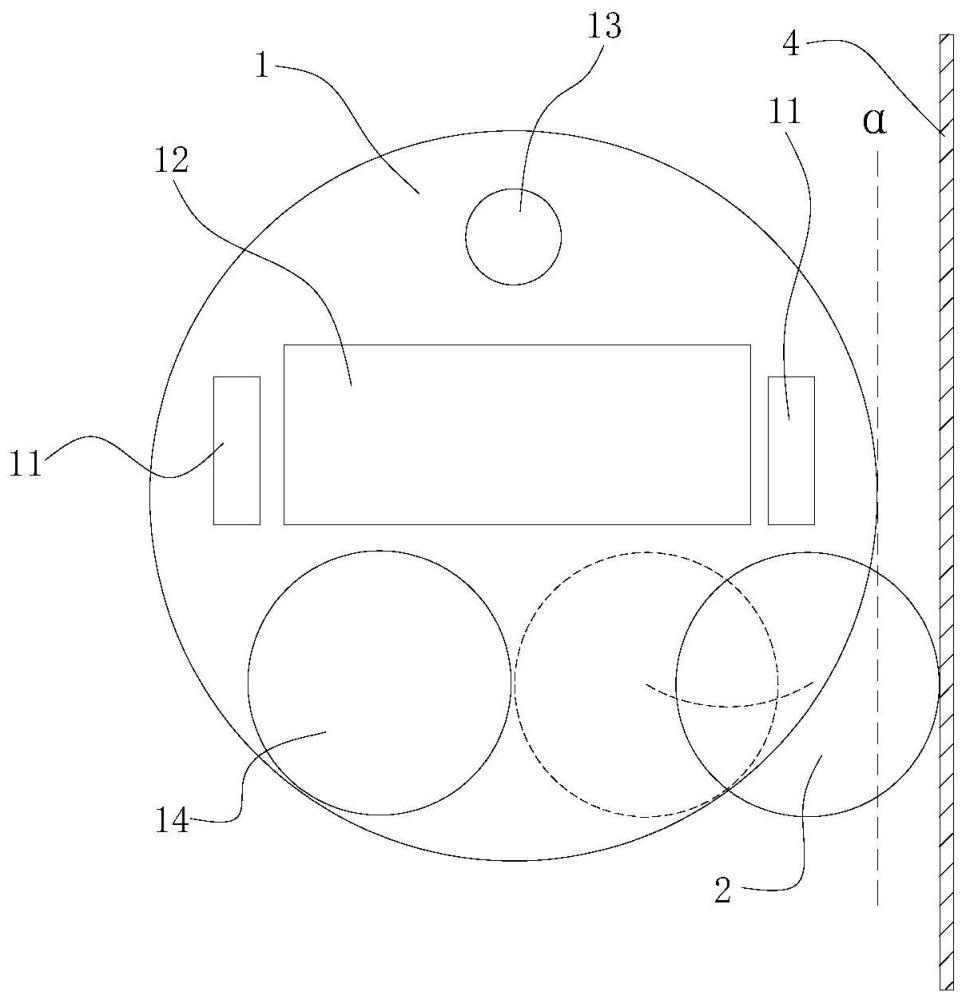
4、可动清洁器,所述可动清洁器被配置为能够相对运动底盘在第一位置和第二位置之间运动;可动清洁器位于第一位置时,其至少部分边缘位于运动底盘的边缘投影区域内,且被构造为能够相对于运动底盘向外摆动至第二位置;
5、探测单元,所述探测单元被配置为用于探测清洁机器人工作环境中的环境信息;
6、控制单元,所述控制单元被配置为基于所述探测单元探测的环境信息确定障碍物信息在清洁机器人的原始移动路径上,控制所述可动清洁器提前往第一位置的方向运动,以及控制所述清洁机器人提前往偏离障碍物的方向行走。
7、在本公开的一个实施例中,所述运动底盘的底部设置有两个驱动轮,所述控制单元被配置为控制两个驱动轮的轮速差,以使所述清洁机器人转向;或者是,所述控制单元被配置为控制清洁机器人后退,以偏离所述障碍物。
8、在本公开的一个实施例中,所述控制单元被配置为控制清洁机器人转向并以至少部分环绕所述障碍物的方式进行移动。
9、在本公开的一个实施例中,在确定障碍物在清洁机器人的原始移动路径上之后,所述控制单元被配置为控制所述清洁机器人按照原始移动路径行走预定距离后,控制所述可动清洁器提前往第一位置的方向运动,以及控制所述清洁机器人提前往偏离障碍物的方向行走。
10、在本公开的一个实施例中,位于第一位置时,所述可动清洁器的边缘位于运动底盘的边缘投影区域内;位于所述第二位置时,所述可动清洁器的至少部分边缘位于运动底盘的边缘投影区域外。
11、在本公开的一个实施例中,所述运动底盘的外轮廓具有在前进方向上的最大边缘,位于所述第二位置时,所述可动清洁器的至少部分边缘位于运动底盘的最大边缘外。
12、在本公开的一个实施例中,所述控制单元被配置为在确定障碍物在清洁机器人的原始移动路径上之后,控制所述可动清洁器往第一位置的方向至少运动至使其外侧边缘位于所述运动底盘的最大边缘内。
13、在本公开的一个实施例中,所述控制单元被配置为在确定障碍物在清洁机器人的原始移动路径上之后,控制所述可动清洁器运动至第一位置,或者运动至位于第一位置与第二位置之间的其它位置。
14、在本公开的一个实施例中,所述清洁机器人离开基站后,所述控制单元被配置为控制可动清洁器以第二位置作为正常的工作姿态在工作面上进行清洁作业。
15、在本公开的一个实施例中,所述清洁机器人的相对两侧分别记为第一侧、第二侧;在所述清洁机器人的第一侧设置有固定清洁器,所述固定清洁器的边缘位于运动底盘的边缘投影区域内;所述可动清洁器设置在第二侧;
16、所述控制单元被配置为控制清洁机器人以可动清洁器面向所述障碍物的方式进行转向。
17、在本公开的一个实施例中,所述可动清洁器往第一位置的方向运动之后,所述控制单元被配置为在预定时间内或者清洁机器人行走预定距离后控制所述可动清洁器复位至第二位置;和/或
18、在所述清洁机器人往偏离障碍物的方向行走之后,所述控制单元被配置为在预定时间内或者清洁机器人行走预定距离后控制所述清洁机器人按照原始移动路径行走。
19、在本公开的一个实施例中,所述控制单元被配置为响应于返回信号,控制可动清洁器运动至第一位置,以使清洁机器人作为维护姿态停靠在基站中。
20、根据本公开的第二方面,还提供了一种清洁机器人的控制方法,所述方法包括如下步骤:
21、在第二位置下,控制清洁机器人在工作面上行走以对工作面进行清洁;
22、控制单元被配置为基于所述探测单元探测的环境信息确定障碍物在清洁机器人的原始移动路径上,控制所述可动清洁器提前往第一位置的方向运动,以及控制所述清洁机器人提前往偏离障碍物的方向行走。
23、本公开的一个有益效果在于,当清洁机器人的移动路径上存在障碍物时,控制单元能够控制清洁机器人转向,以使清洁机器人整体避障;此外,控制单元还能够控制可动清洁器提前往第一位置的方向运动,以使可动清洁器内收避障。本公开实现了协同两种避障行为,降低了碰撞发生的概率,延长了清洁机器人的使用寿命,提升了用户的使用体验。可动清洁器能够在第一位置和第二位置之间运动,运动至第二位置时有效增加了清洁机器人的清洁覆盖范围,实现了全面清洁。
24、通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
技术特征:
1.一种清洁机器人,其特征在于,所述清洁机器人包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述运动底盘(1)的底部设置有两个驱动轮(11),所述控制单元被配置为控制两个驱动轮(11)的轮速差,以使所述清洁机器人转向;或者是,所述控制单元被配置为控制清洁机器人后退,以偏离所述障碍物。
3.根据权利要求1所述的清洁机器人,其特征在于,所述控制单元被配置为控制清洁机器人转向并以至少部分环绕所述障碍物的方式进行移动。
4.根据权利要求1所述的清洁机器人,其特征在于,在确定障碍物在清洁机器人的原始移动路径上之后,所述控制单元被配置为控制所述清洁机器人按照原始移动路径行走预定距离后,控制所述可动清洁器(2)提前往第一位置的方向运动,以及控制所述清洁机器人提前往偏离障碍物的方向行走。
5.根据权利要求1所述的清洁机器人,其特征在于,位于第一位置时,所述可动清洁器(2)的边缘位于运动底盘(1)的边缘投影区域内;位于所述第二位置时,所述可动清洁器(2)的至少部分边缘位于运动底盘(1)的边缘投影区域外。
6.根据权利要求1所述的清洁机器人,其特征在于,所述运动底盘(1)的外轮廓具有在前进方向上的最大边缘,位于所述第二位置时,所述可动清洁器(2)的至少部分边缘位于运动底盘(1)的最大边缘外。
7.根据权利要求6所述的清洁机器人,其特征在于,所述控制单元被配置为在确定障碍物在清洁机器人的原始移动路径上之后,控制所述可动清洁器(2)往第一位置的方向至少运动至使其外侧边缘位于所述运动底盘(1)的最大边缘内。
8.根据权利要求7所述的清洁机器人,其特征在于,所述控制单元被配置为在确定障碍物在清洁机器人的原始移动路径上之后,控制所述可动清洁器(2)运动至第一位置,或者运动至位于第一位置与第二位置之间的其它位置。
9.根据权利要求1所述的清洁机器人,其特征在于,所述清洁机器人离开基站后,所述控制单元被配置为控制可动清洁器(2)以第二位置作为正常的工作姿态在工作面上进行清洁作业。
10.根据权利要求9所述的清洁机器人,其特征在于,所述清洁机器人的相对两侧分别记为第一侧、第二侧;在所述清洁机器人的第一侧设置有固定清洁器(14),所述固定清洁器(14)的边缘位于运动底盘(1)的边缘投影区域内;所述可动清洁器(2)设置在第二侧;
11.根据权利要求1所述的清洁机器人,其特征在于,所述可动清洁器(2)往第一位置的方向运动之后,所述控制单元被配置为在预定时间内或者清洁机器人行走预定距离后控制所述可动清洁器(2)复位至第二位置;和/或
12.根据权利要求1所述的清洁机器人,其特征在于,所述控制单元被配置为响应于返回信号,控制可动清洁器(2)运动至第一位置,以使清洁机器人作为维护姿态停靠在基站中。
13.一种根据权利要求1至12任意一项所述清洁机器人的控制方法,其特征在于,所述方法包括如下步骤:
技术总结
本公开涉及一种清洁机器人及其控制方法,清洁机器人包括:运动底盘、可动清洁器、探测单元和控制单元。运动底盘在工作面上行走;可动清洁器能够相对运动底盘在第一位置和第二位置之间运动;可动清洁器位于第一位置时,其至少部分边缘位于运动底盘的边缘投影区域内,且被构造为能够相对于运动底盘向外摆动至第二位置;探测单元被配置为用于探测清洁机器人工作环境中的环境信息;控制单元被配置为基于环境信息确定障碍物信息在清洁机器人的原始移动路径上,控制可动清洁器提前往第一位置的方向运动,以及控制清洁机器人提前往偏离障碍物的方向行走。本公开实现了协同两种避障行为,降低了碰撞发生的概率。
技术研发人员:钱东奇
受保护的技术使用者:科沃斯家用机器人有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!