一种扫地机器人及防碰撞方法与流程
本发明属于扫地机器人,具体涉及一种扫地机器人及防碰撞方法。
背景技术:
1、扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。
2、然而传统的装置在使用时还存在以下问题:
3、无法对扫地机器人本体进行防护,若扫地机器人在工作过程中触碰到物体或受到物体撞击时,可能会使扫地机器人内部零件损坏,从而造成损失,最终导致机器人无法正常工作。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供一种扫地机器人及防碰撞方法,具备可以防护扫地机器人本体,避免扫地机器人本体受到外界撞击而导致内部零件损坏的优点。
2、为实现上述目的,本发明提供如下技术方案:一种扫地机器人,包括机器人本体,所述机器人本体的顶部外壁固定安装有感应器,所述机器人本体的侧边外壁均匀固定连接有多个安装座,所述安装座开设有两侧内壁相连通的矩形开口,所述矩形开口的长度大于宽度,所述矩形开口的内部设置有安装机构,所述安装座的顶部外壁活动连接有防撞壳,所述防撞壳的顶部设置有防撞机构,所述防撞机构包括动力组件和收缩组件。
3、优选的,所述防撞壳的顶部外壁固定连接有固定连接板,所述固定连接板的另一端外壁固定连接有固定圆,所述防撞壳的顶部外壁和固定圆的顶部外壁分别开设有第一滑槽和第二滑槽,所述第一滑槽的内壁和第二滑槽的内壁均活动连接有多个滚动轮。
4、优选的,两个所述滚动轮的顶部外壁固定连接有同一个运动连接板,所述运动连接板的顶部外壁和固定连接板的顶部外壁均固定连接有固定块,所述固定块的顶部外壁固定连接有组合块。
5、优选的,所述收缩组件包括组合块、转动轴杆、被动齿轮、连杆、运动连接板、运动组合块、遮挡板、第一开合件和第二开合件,所述第一开合件的底部外壁和第二开合件的底部外壁均与两个滚动轮的顶部外壁固定连接,所述第一开合件、第二开合件、组合块和运动组合块均开设有两侧内壁相连通的圆口,所述组合块和运动组合块上的圆口对称设置有两个,所述转动轴杆的外壁与圆口的内壁活动连接,所述被动齿轮的内壁与转动轴杆靠近机器人本体的一端外壁固定连接,所述连杆的两端均与被动齿轮的外壁固定连接,两个所述齿轮的侧边外壁与同一个遮挡板的外壁固定连接。
6、优选的,所述运动组合块位于两个所述运动连接板之间或一个运动连接板和固定连接板之间,两个所述被动齿轮的外壁相互啮合连接。
7、优选的,所述动力组件包括双向电机、蜗杆、涡轮和主动转动轴,所述双向电机的外壁与固定连接板的顶部外壁固定连接,所述蜗杆的底部外壁与双向电机的输出轴固定连接,所述蜗杆的外壁与涡轮固定连接,涡轮的内壁与主动转动轴的外壁固定连接,所述主动转动轴穿过圆口与被动齿轮固定连接。
8、优选的,所述防撞壳的顶部内壁固定连接有保护气囊,所述保护气囊的底部外壁固定连接有充气口。
9、优选的,所述安装机构包括插板、复位弹簧、连接块、轴承、转动件、两个卡接槽和卡接凸块,两个所述卡接槽开设在安装座的底部外壁,所述插板的侧边外壁与矩形开口的内壁卡接,所述矩形开口的顶部外壁与防撞壳的顶部内壁固定连接,所述复位弹簧的顶端外壁与插板的底部外壁固定连接,所述复位弹簧的底端外壁与连接块的顶部外壁固定连接,所述连接块的底部外壁开设有圆槽,所述轴承的外轴套与圆槽的内壁固定连接,所述轴承的内轴套与转动件的顶部外壁固定连接,所述转动件的底部外壁与两个卡接凸块固定连接,所述卡接凸块的外壁与卡接槽的内壁卡接。
10、优选的,所述第一开合件的底部外壁固定连接有清理棉布,所述清理棉布的底部外壁与感应器的顶部外壁固定连接。
11、一种扫地机器人防碰撞方法,其基于上述任意一项所述的一种扫地机器人,包括以下步骤:
12、步骤一:将插板卡接进矩形开口内,随后拉动卡接凸块向下运动,此时弹簧被拉伸,随后转动卡接凸块,使卡接凸块的位置与卡接槽的位置对应,对应完毕后松开卡接凸块,复位弹簧立即复位,带动卡接凸块向上运动,与卡接槽卡接,通过复位弹簧的拉力作用,卡接凸块不易松动,从而快速完成防撞壳的快速安装;
13、步骤二:通过双向电机转动带动蜗杆转动,蜗杆转动带动涡轮转动,涡轮转动带动主动转动轴转动,主动转动轴转动带动与主动转动轴外壁固定连接的被动齿轮转动,一个被动齿轮转动带动与其啮合连接的被动齿轮反方向转动,两个被动齿轮转动带动连杆向下运动,一个连杆向下运动将带动与其靠近的连杆向下运动,依次类推,连杆将通过被动齿轮的作用带动第一开合件和第二开合件相互靠近并贴合,使多个遮挡板在机器人本体的上方形成一个圆以保护机器人本体,当上方不再检测到硬性物体时,双向电机反方向转动,双向电机转动带动连杆折叠,从而带动遮挡板折叠,此时,机器人本体的上方只有部分面积被遮挡,有利于机器人本体的散热;
14、步骤三;通过第一开合件的来回转动带动清理棉布在感应器的表面来回擦拭,以清理感应器表面的灰尘。
15、与现有技术相比,本发明的有益效果是:
16、1、通过双向电机转动带动蜗杆转动,蜗杆转动带动涡轮转动,涡轮转动带动主动转动轴转动,主动转动轴转动带动与主动转动轴外壁固定连接的被动齿轮转动,一个被动齿轮转动带动与其啮合连接的被动齿轮反方向转动,两个被动齿轮转动带动连杆向下运动,一个连杆向下运动将带动与其靠近的连杆向下运动,依次类推,连杆将通过被动齿轮的作用带动第一开合件和第二开合件相互靠近并贴合,使多个遮挡板在机器人本体的上方形成一个圆以保护机器人本体,当上方不再检测到硬性物体时,双向电机反方向转动,双向电机转动带动连杆折叠,从而带动遮挡板折叠,此时,机器人本体的上方只有部分面积被遮挡,有利于机器人本体的散热,本发明通过防撞机构可以防护扫地机器人本体,避免扫地机器人本体受到外界撞击而导致内部零件损坏,从而造成损失。
17、2、通过将插板卡接进矩形开口内,随后拉动卡接凸块向下运动,此时弹簧被拉伸,随后转动卡接凸块,使卡接凸块的位置与卡接槽的位置对应,对应完毕后松开卡接凸块,复位弹簧立即复位,带动卡接凸块向上运动,与卡接槽卡接,通过复位弹簧的拉力作用,卡接凸块不易松动,从而快速完成防撞壳的快速安装,本发明通过安装机构可以快速完成防撞壳和防撞机构的安装,使机器人本体在不工作时的收纳和清理等问题更方便。
18、3、通过第一开合件的来回转动带动清理棉布在感应器的表面来回擦拭,以清理感应器表面的灰尘,避免感应器表面堆积灰尘而影响感应器灵敏度的问题。
技术特征:
1.一种扫地机器人,包括机器人本体(1),其特征在于:所述机器人本体(1)的顶部外壁固定安装有感应器(28),所述机器人本体(1)的侧边外壁均匀固定连接有多个安装座(2),所述安装座(2)开设有两侧内壁相连通的矩形开口(3),所述矩形开口(3)的长度大于宽度,所述矩形开口(3)的内部设置有安装机构,所述安装座(2)的顶部外壁活动连接有防撞壳(11),所述防撞壳(11)的顶部设置有防撞机构,所述防撞机构包括动力组件和收缩组件。
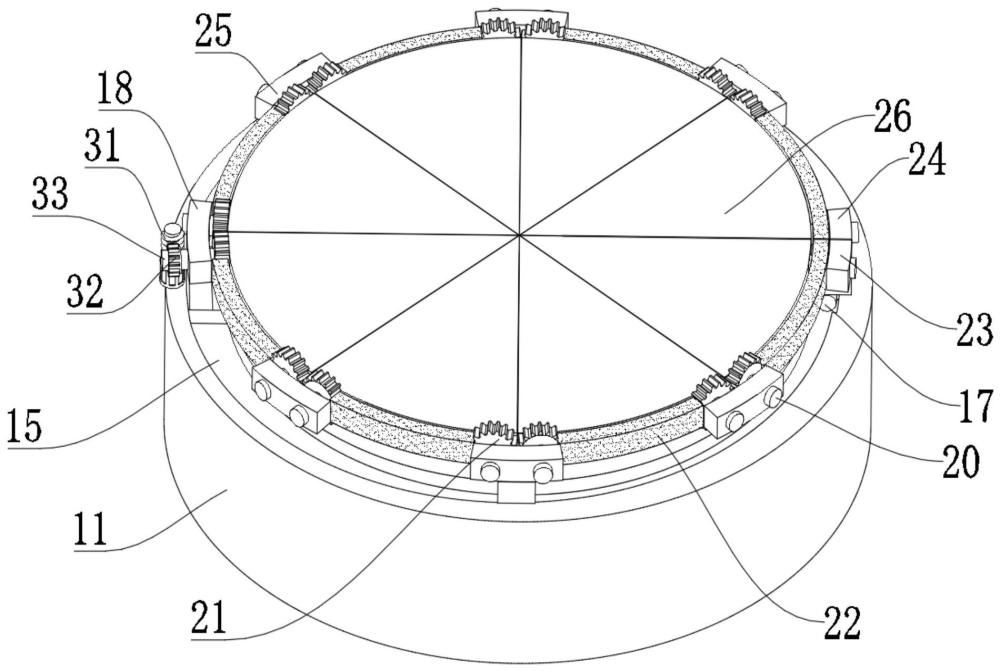
2.根据权利要求1所述的一种扫地机器人,其特征在于:所述防撞壳(11)的顶部外壁固定连接有固定连接板(13),所述固定连接板(13)的另一端外壁固定连接有固定圆(14),所述防撞壳(11)的顶部外壁和固定圆(14)的顶部外壁分别开设有第一滑槽(15)和第二滑槽(16),所述第一滑槽(15)的内壁和第二滑槽(16)的内壁均活动连接有多个滚动轮(17)。
3.根据权利要求2所述的一种扫地机器人,其特征在于:两个所述滚动轮(17)的顶部外壁固定连接有同一个运动连接板(34),所述运动连接板(34)的顶部外壁和固定连接板(13)的顶部外壁均固定连接有固定块(29),所述固定块(29)的顶部外壁固定连接有组合块(18)。
4.根据权利要求1所述的一种扫地机器人,其特征在于:所述收缩组件包括多个组合块(18)、转动轴杆(20)、被动齿轮(21)、连杆(22)、运动连接板(34)、运动组合块(25)、遮挡板(26)、第一开合件(23)和第二开合件(24),所述第一开合件(23)的底部外壁和第二开合件(24)的底部外壁均与两个滚动轮(17)的顶部外壁固定连接,所述第一开合件(23)、第二开合件(24)、组合块(18)和运动组合块(25)均开设有两侧内壁相连通的圆口(19),所述组合块(18)和运动组合块(25)上的圆口(19)对称设置有两个,所述转动轴杆(20)的外壁与圆口(19)的内壁活动连接,所述被动齿轮(21)的内壁与转动轴杆(20)靠近机器人本体(1)的一端外壁固定连接,所述连杆(22)的两端均与被动齿轮(21)的外壁固定连接,两个所述齿轮的侧边外壁与同一个遮挡板(26)的外壁固定连接。
5.根据权利要求4所述的一种扫地机器人,其特征在于:所述运动组合块(25)位于两个所述运动连接板(34)之间或一个运动连接板(34)和固定连接板(13)之间,两个所述被动齿轮(21)的外壁相互啮合连接。
6.根据权利要求1所述的一种扫地机器人,其特征在于:所述动力组件包括双向电机(30)、蜗杆(31)、涡轮(32)和主动转动轴(33),所述双向电机(30)的外壁与固定连接板(13)的顶部外壁固定连接,所述蜗杆(31)的底部外壁与双向电机(30)的输出轴固定连接,所述蜗杆(31)的外壁与涡轮(32)固定连接,涡轮(32)的内壁与主动转动轴(33)的外壁固定连接,所述主动转动轴(33)穿过圆口(19)与被动齿轮(21)固定连接。
7.根据权利要求1所述的一种扫地机器人,其特征在于:所述防撞壳(11)的顶部内壁固定连接有保护气囊(12),所述保护气囊(12)的底部外壁固定连接有充气口(35)。
8.根据权利要求4所述的一种扫地机器人,其特征在于:所述安装机构包括插板(5)、复位弹簧(6)、连接块(7)、轴承(8)、转动件(9)、两个卡接槽(4)和卡接凸块(10),两个所述卡接槽(4)开设在安装座(2)的底部外壁,所述插板(5)的侧边外壁与矩形开口(3)的内壁卡接,所述矩形开口(3)的顶部外壁与防撞壳(11)的顶部内壁固定连接,所述复位弹簧(6)的顶端外壁与插板(5)的底部外壁固定连接,所述复位弹簧(6)的底端外壁与连接块(7)的顶部外壁固定连接,所述连接块(7)的底部外壁开设有圆槽,所述轴承(8)的外轴套与圆槽的内壁固定连接,所述轴承(8)的内轴套与转动件(9)的顶部外壁固定连接,所述转动件(9)的底部外壁与两个卡接凸块(10)固定连接,所述卡接凸块(10)的外壁与卡接槽(4)的内壁卡接。
9.根据权利要求4所述的一种扫地机器人,其特征在于:所述第一开合件(23)的底部外壁固定连接有清理棉布(27),所述清理棉布(27)的底部外壁与感应器(28)的顶部外壁固定连接。
10.一种扫地机器人防碰撞方法,其基于上述权利要求书1-9中任意一项所述的一种扫地机器人,包括以下步骤:
技术总结
本发明公开了一种扫地机器人,包括机器人本体,机器人本体的顶部外壁固定安装有感应器,机器人本体的侧边外壁均匀固定连接有多个安装座,安装座开设有矩形开口,矩形开口的长度大于宽度,矩形开口的内部设置有安装机构,安装座的顶部外壁活动连接有防撞壳,防撞壳的顶部设置有防撞机构,通过双向电机转动带动蜗杆转动,蜗杆转动带动涡轮转动,涡轮转动带动被动齿轮转动,被动齿轮转动带动连杆向下运动,一个连杆向下运动将带动与其靠近的连杆向下运动,依次类推,连杆将带动第一开合件和第二开合件相互靠近并贴合,使多个遮挡板在机器人本体的上方形成一个圆以保护机器人本体,避免扫地机器人本体受到外界撞击而导致内部零件损坏,从而造成损失。
技术研发人员:吴义平
受保护的技术使用者:湖州经宁信息科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!