作业区域设定系统和操作目标检测系统的制作方法
本发明涉及一种作业区域设定系统和一种操作目标检测系统。
背景技术:
1、关于在作业机器的自动驱动技术中检测操作目标的技术,专利文献1叙述了一种基于三维测量装置的测量数据来计算从轮式装载机到作为挖掘目标的自然地面的距离或自然地面的休止角的技术。
2、[引文列表]
3、[专利文献]
4、[专利文献1]日本特许公开专利公报第2019-178599号
技术实现思路
1、[技术问题]
2、假设例如在三维测量装置的检测区域内存在多个自然地面。在这种情况下,难以通过专利文献1中叙述的技术来指定挖掘目标的计算目标范围。结果,可能难以执行作业机器的自动驱动控制。
3、本发明的目的是提供一种作业区域设定系统,其促进作业机器的自动驱动控制。
4、[问题的解决方案]
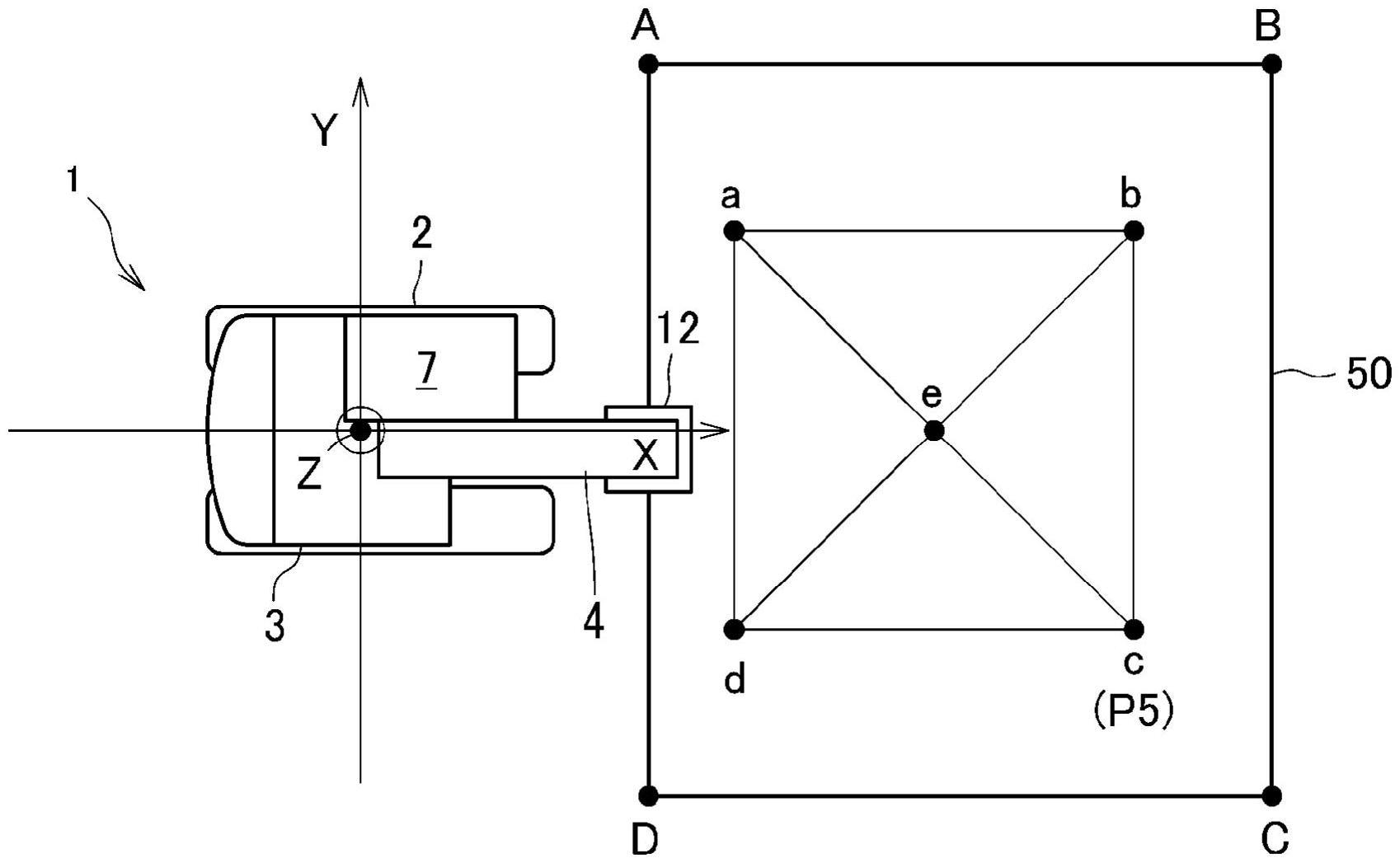
5、一种作业区域设定系统包括区域设定单元,该区域设定单元被构造成设定作业区域的预定范围,作业机器的操作目标被堆叠在作业区域处。
6、[本发明的有利效果]
7、这种布置进一步促进作业机器的自动驱动控制。
技术特征:
1.一种作业区域设定系统,其包括区域设定单元,所述区域设定单元被构造成设定作业区域的预定范围,作业机器的操作目标被堆叠在作业区域处。
2.根据权利要求1所述的作业区域设定系统,其中,
3.根据权利要求2所述的作业区域设定系统,其中,
4.根据权利要求3所述的作业区域设定系统,其中,
5.根据权利要求1至4中任一项所述的作业区域设定系统,其进一步包括:
6.根据权利要求5所述的作业区域设定系统,其中,
7.根据权利要求1至6中任一项所述的作业区域设定系统,其进一步包括:
8.一种操作目标检测系统,其包括:
9.根据权利要求8所述的操作目标检测系统,其中,
10.根据权利要求8或9所述的操作目标检测系统,其进一步包括:
11.根据权利要求10所述的操作目标检测系统,其进一步包括:
技术总结
提供了一种用于进一步促进作业机器的自动驱动控制的技术。作业区域设定系统包括区域设定单元(24)。区域设定单元(24)被提供来设定作业区域(50)。作业区域(50)是作业机器(1)的操作目标(100)被堆叠在其中的预定范围。
技术研发人员:野田大辅,福尾展弘,秋山将贵,藤原翔
受保护的技术使用者:神钢建机株式会社
技术研发日:
技术公布日:2024/1/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1