一种智能化水面清洁机器人的制作方法
本发明应用于水面清洁机器人背景,名称是一种智能化水面清洁机器人。
背景技术:
1、在人们日常生活区域中,尤其是在村镇,会存在河道和鱼塘,水面上由于漂浮垃圾,容易造成水质污染,也可能会导致大量生物死亡,比如鱼、虾之类的。当水面的垃圾多时,一般是通过打捞船对水面的垃圾进行打捞,可以讲较大或者较多的垃圾打捞出来,但是还会有一些小型垃圾漂浮在水面的边缘,人们难以打捞,因此会使用到水面清洁机器人。
2、然而现有的水面清洁机器人,在水面遇到水浪时难以保持平稳,很容易被水浪吹离要清洁的水面,从而影响清洁效率。
3、故,有必要提供一种智能化水面清洁机器人,可以达到提高水面清洁机器人平稳性的作用。
技术实现思路
1、本发明的目的在于提供一种智能化水面清洁机器人,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:一种智能化水面清洁机器人,包含壳体、换向组件、平稳组件和水面机器人控制系统,其中:
3、所述壳体的左右两侧开设有穿孔,所述壳体的顶部中间固定有两组固定杆,所述平稳组件设置于穿孔的内部;
4、所述平稳组件包括有第二安装板、第二连接桶、折弯板、安装块、第二驱动、增氧管,其中:
5、所述第二安装板与固定杆固定,所述第二连接桶与第二安装板通过这弯板固定,所述第二驱动设置于第二安装板的下方,所述第二驱动与第二安装板通过安装块固定,所述第二驱动的顶部固定有第二旋转柱,所述第二旋转柱的表面固定有四组第二叶片,所述第二驱动的底部固定有增氧管,所述增氧管的表面开设有若干增氧孔。
6、在一个实施例中,所述壳体的两侧固定有收集筒,所述收集筒的表面开设有若干滤孔,所述壳体的下方设置有漂浮桶,所述壳体的前后两侧均固定有固定架,所述固定架的两侧连接架,所述连接架与漂浮桶固定,所述换向组件设置于固定架的两侧。
7、在一个实施例中,所述换向组件包括有第一安装板、第一连接桶、第一驱动、第一旋转柱、连接块,其中:
8、所述第一安装板与连接架固定,所述第一连接桶固定于第一安装架的下方,所述第一驱动与第一连接桶通过连接块固定连接,所述第一旋转柱固定于第一驱动的输出轴上,所述第一旋转柱的表面固定四组第一叶片。
9、在一个实施例中,所述漂浮桶的后侧固定有第三驱动,所述第三驱动的输出轴固定有旋转轴,所述旋转轴的表面固定有螺旋片,所述收集筒的一侧设置有固定轴,所述固定轴的表面铰接有挡板。
10、在一个实施例中,所述壳体的顶部前后两侧分别固定有接收器和发射器,所述壳体的前后两端固定有摄像头,所述壳体的顶部中间固定有水平检测器。
11、在一个实施例中,所述面机器人控制系统包括有判断模块和控制模块,所述判断模块包括有路径规划子模块、定位子模块、接收子模块,所述接收子模块包括有分析单元和平衡识别单元,所述控制模块包括有第一控制子模块、第二控制子模块和第三控制子模块,所述接收子模块与摄像头和水平检测器为电连接,所述第一控制子模块与四组第一驱动为电连接,所述第二控制子模块与左侧的第二驱动为电连接,所述第三控制子模块与右侧的第二驱动为电连接。
12、与现有技术相比,本发明所达到的有益效果是:本发明通过设置有平稳组件,可以识别机器人在工作晃动程度大时,可以增加取稳定性,减少其晃动,提高收集垃圾的稳定性。
技术特征:
1.一种智能化水面清洁机器人,包含壳体(1)、换向组件、平稳组件和水面机器人控制系统,其中:
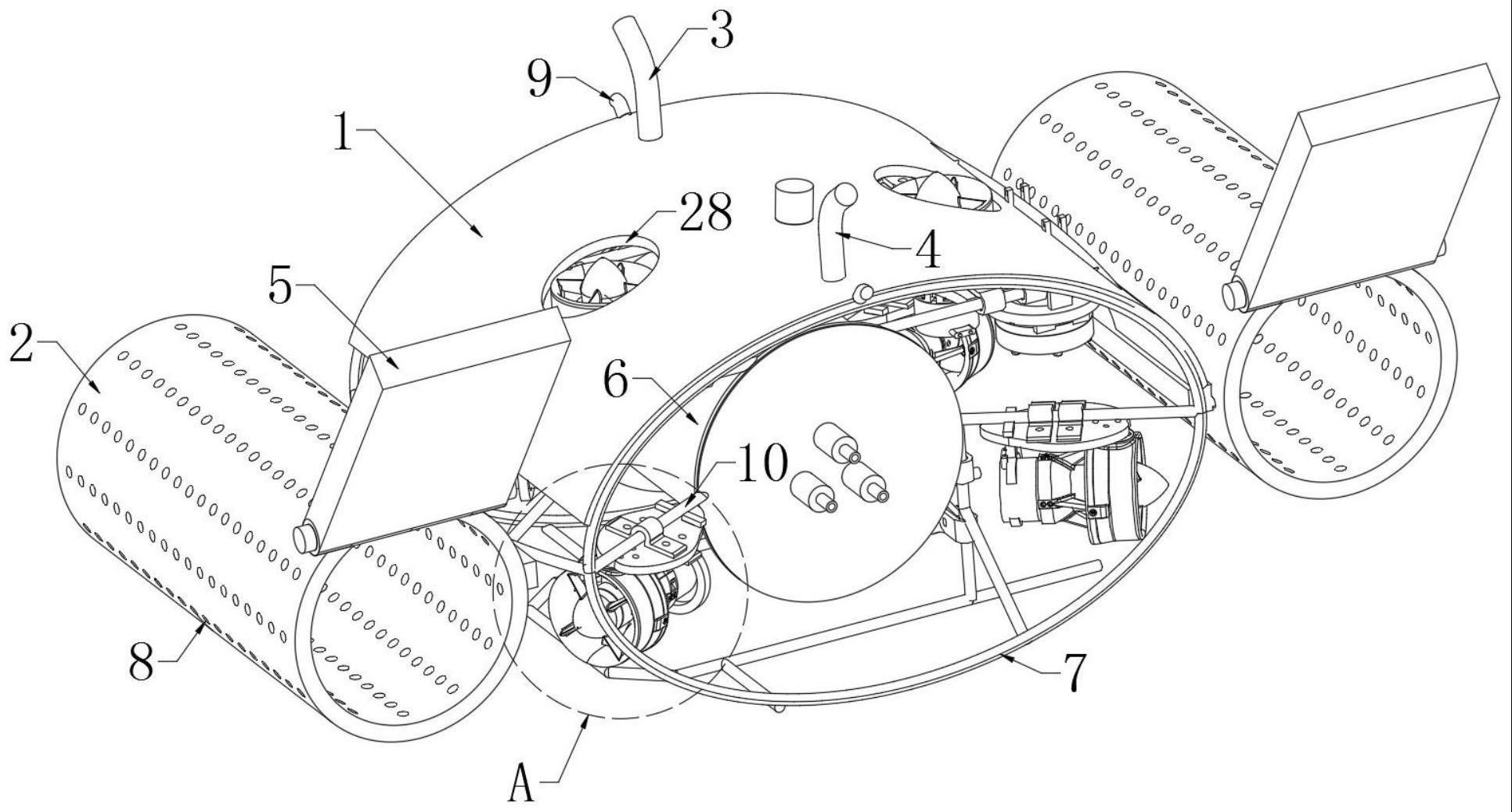
2.根据权利要求1所述的一种智能化水面清洁机器人,其特征在于:所述壳体(1)的两侧固定有收集筒(2),所述收集筒(2)的表面开设有若干滤孔(8),所述壳体(1)的下方设置有漂浮桶(6),所述壳体(1)的前后两侧均固定有固定架(7),所述固定架(7)的两侧连接架(10),所述连接架(10)与漂浮桶(6)固定,所述换向组件设置于固定架(7)的两侧。
3.根据权利要求2所述的一种智能化水面清洁机器人,其特征在于:所述换向组件包括有第一安装板(11)、第一连接桶(12)、第一驱动(14)、第一旋转柱(15)、连接块(13),其中:
4.根据权利要求3所述的一种智能化水面清洁机器人,其特征在于:所述漂浮桶(6)的后侧固定有第三驱动(17),所述第三驱动(17)的输出轴固定有旋转轴(18),所述旋转轴(18)的表面固定有螺旋片(19),所述收集筒(2)的一侧设置有固定轴,所述固定轴的表面铰接有挡板(5)。
5.根据权利要求4所述的一种智能化水面清洁机器人,其特征在于:所述壳体(1)的顶部前后两侧分别固定有接收器(3)和发射器(4),所述壳体(1)的前后两端固定有第一摄像头(9),所述壳体(1)的顶部中间固定有水平检测器。
6.根据权利要求5所述的一种智能化水面清洁机器人,其特征在于:所述面机器人控制系统包括有判断模块和控制模块,所述判断模块包括有路径规划子模块、定位子模块、接收子模块,所述接收子模块包括有分析单元和平衡识别单元,所述控制模块包括有第一控制子模块、第二控制子模块和第三控制子模块,所述接收子模块与第一摄像头(9)和水平检测器为电连接,所述第一控制子模块与四组第一驱动(14)为电连接,所述第二控制子模块与左侧的第二驱动(24)为电连接,所述第三控制子模块与右侧的第二驱动(24)为电连接。
7.根据权利要求6所述的一种智能化水面清洁机器人,其特征在于:所述面机器人控制系统包括以下具体操作步骤:
8.根据权利要求7所述的一种智能化水面清洁机器人,其特征在于:所述步骤b包括以下具体操作步骤:
技术总结
本发明公开了一种智能化水面清洁机器人,包含壳体、换向组件、平稳组件和水面机器人控制系统,其中:所述壳体的左右两侧开设有穿孔,所述壳体的顶部中间固定有两组固定杆,所述平稳组件设置于穿孔的内部;所述平稳组件包括有第二安装板、第二连接桶、折弯板、安装块、第二驱动、增氧管,其中:所述第二安装板与固定杆固定,所述第二连接桶与第二安装板通过这弯板固定,所述第二驱动设置于第二安装板的下方,所述第二驱动与第二安装板通过安装块固定,所述第二驱动的顶部固定有第二旋转柱,所述第二旋转柱的表面固定有四组第二叶片,所述第二驱动的底部固定有增氧管,本发明,便捷高效地实现了提高水面机器人清洁稳定功能。
技术研发人员:朱玥玥
受保护的技术使用者:朱玥玥
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!