用于全面清淤的高效清淤机器人的制作方法
本技术涉及淤泥清理,尤其涉及一种用于全面清淤的高效清淤机器人。
背景技术:
1、随着我国城市化进程的加快,城市排水系统的规模也逐渐扩大,城市的排水管道、箱涵由于长时间的淤泥沉积,导致管路出现堵塞、污水溢流,进而引起“内涝”,急需定期清理。同时,城市化带来的环境污染问题使得污泥搜集和工厂无害化处理受到高度重视,河道、沟渠、污泥池等区域的污泥也需要定期搜集清理。隐蔽于地下的大型下水管道、箱涵一直采用人工清淤,但是人工清淤的作业难度大、安全性差,特别是箱涵中存在有毒气体极易造成人身安全事故,因此清淤行业急需能进行无人化作业的清淤设备。
2、公开号为cn212001552u的专利提供了一种暗渠清淤机器人,其结构如下:铲斗通过液压油缸与数控油泵连接,数控油泵与大臂控制液压油缸和油泵马达连接,油泵马达与驱动轮连接,驱动轮外设履带,驱动履带上安装有底盘,机舱罩安装在底盘上,大臂安装在机舱罩前外围,大臂与铲斗连接,大臂控制液压油缸与大臂连接,柴油发动机与数控油泵连接,液压油回流油箱通过油管与液压油缸连接、大臂控制液压油缸和油泵马达连接,单片机的信号输入端与遥控器连接,单片机的输出端与数控油泵和柴油发动机连接。该专利提供的机器人虽然能够在有限空间内进行涉水、远距离作业,但其铲斗只能够随着履带的前后运行进行清淤,无法左右转动清淤,清淤范围较窄;同时,该铲斗只能够对暗渠的底部进行铲挖,对于附着于暗渠顶部及侧壁上的部分淤积物则无法进行清理,清淤不够全面;并且,该机器人中缺乏收集淤泥的料斗,每次铲挖后都需要将铲斗内的淤泥等杂物运出后才能进行后续清淤,整体清淤效率较低。
3、有鉴于此,有必要设计一种能够更加全面高效地进行清淤的清淤机器人,以解决上述问题。
技术实现思路
1、针对上述现有技术的缺陷,本实用新型的目的在于提供一种用于全面清淤的高效清淤机器人,通过设置旋转装置驱动支撑平台进行旋转,使铲斗能够对暗涵底部各个方向的淤积物进行有效清理,同时利用冲洗装置对顶部及侧壁上的淤积物进行冲刷,简便高效地实现全面清淤。
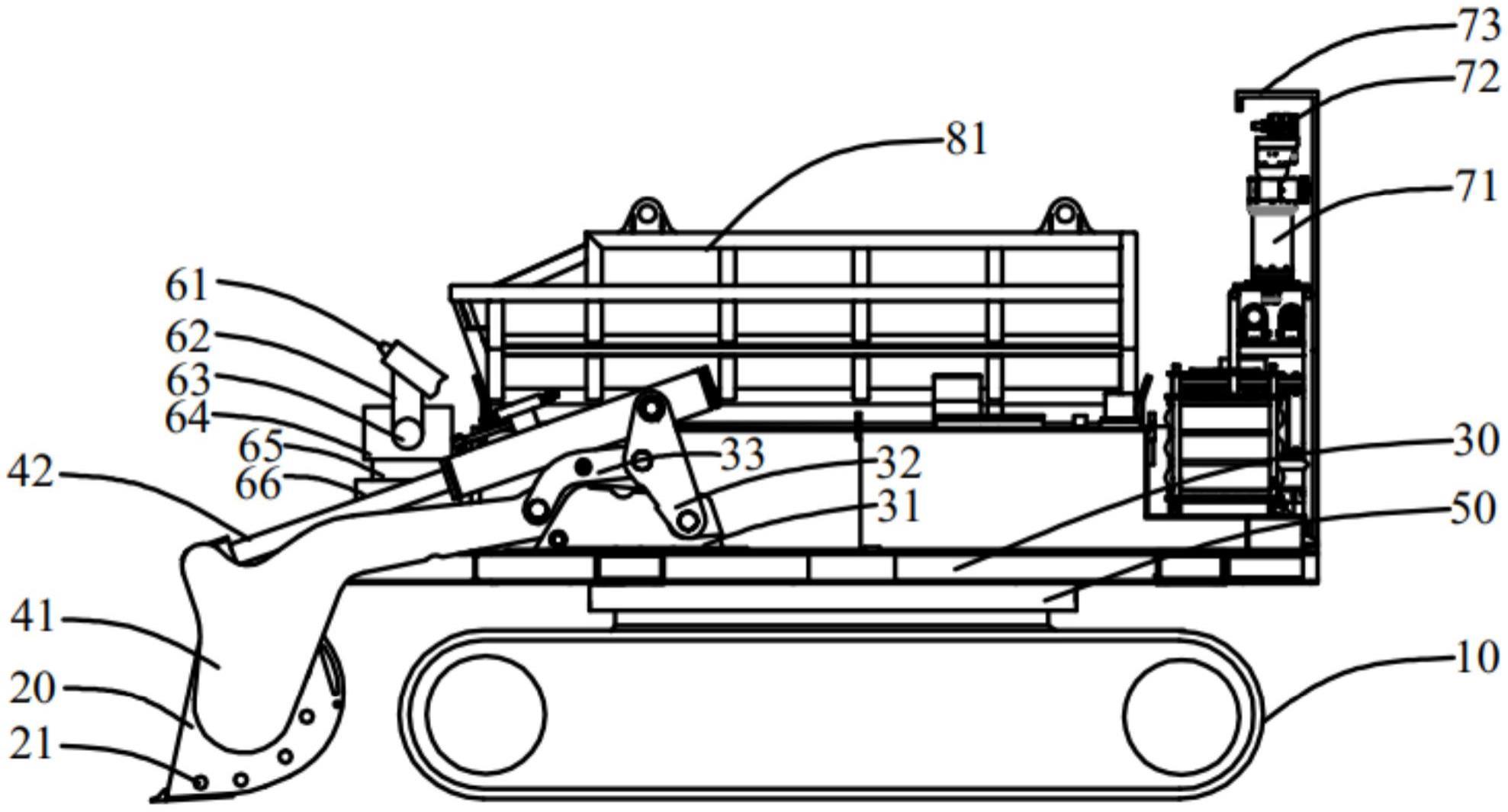
2、为实现上述目的,本实用新型提供了一种用于全面清淤的高效清淤机器人,包括履带行走装置、设置于所述履带行走装置前方的铲斗、设置于所述履带行走装置上方的支撑平台、设置于所述支撑平台两侧的机械臂以及设置于所述履带行走装置和所述支撑平台之间的用于驱动所述支撑平台旋转的旋转装置;所述支撑平台上靠近所述铲斗的一端设置有冲洗装置,所述冲洗装置包括与外部高压水管相连通的冲洗喷头以及用于调节所述冲洗喷头的冲洗角度的调节装置。
3、作为本实用新型的进一步改进,所述调节装置包括与所述冲洗喷头的底部连接的用于驱动所述冲洗喷头沿竖直方向转动的竖直角度调节组件、设置于所述竖直角度调节组件与所述支撑平台之间的水平角度调节组件。
4、作为本实用新型的进一步改进,所述竖直角度调节组件包括与所述冲洗喷头连接的连接杆、带动所述连接杆沿竖直方向转动的转轴以及驱动所述转轴转动的第一电机;所述水平角度调节组件包括设置于所述竖直角度调节组件底部的水平转盘以及用于驱动所述水平转盘转动的第二电机。
5、作为本实用新型的进一步改进,所述支撑平台上远离所述铲斗的一端设置有用于固定摄像装置的云台;所述摄像装置设置于所述云台上,所述摄像装置的观测方向根据所述云台的转动进行变化。
6、作为本实用新型的进一步改进,所述摄像装置上方设置有挡板,用于防止冲洗后顶部残留的水滴影响所述摄像装置的运行。
7、作为本实用新型的进一步改进,所述支撑平台上设置有支撑组件;所述机械臂的一端与所述铲斗连接,另一端与所述支撑组件连接。
8、作为本实用新型的进一步改进,所述机械臂通过直线液压缸进行旋转调节,所述直线液压缸一端与所述机械臂连接,另一端与所述支撑组件连接。
9、作为本实用新型的进一步改进,所述铲斗的侧壁设置有若干个用于沥水的小孔。
10、作为本实用新型的进一步改进,所述支撑平台上方设置有用于装料的料斗。
11、作为本实用新型的进一步改进,所述料斗与所述支撑平台之间设置有用于控制所述料斗高度的伸缩架。
12、本实用新型的有益效果是:
13、本实用新型提供的用于全面清淤的高效清淤机器人,通过在履带行走装置和支撑平台之间设置旋转装置,能够驱动支撑平台相对履带行走装置进行水平旋转,进而带动支撑平台两侧的机械臂整体进行旋转,使铲斗不仅能够对前方的淤积物进行清理,还能够通过水平旋转对两侧的淤积物进行清理,具有较宽的清淤范围,以便实现对暗涵底部各个方向的淤积物进行有效清理。同时,本实用新型还通过在支撑平台上设置冲洗装置,能够对铲斗无法铲挖的暗涵顶部及侧壁的淤积物进行局部冲刷,从而简便高效地实现全面清淤。
技术特征:
1.一种用于全面清淤的高效清淤机器人,其特征在于:包括履带行走装置、设置于所述履带行走装置前方的铲斗、设置于所述履带行走装置上方的支撑平台、设置于所述支撑平台两侧的机械臂以及设置于所述履带行走装置和所述支撑平台之间的用于驱动所述支撑平台旋转的旋转装置;所述支撑平台上靠近所述铲斗的一端设置有冲洗装置,所述冲洗装置包括与外部高压水管相连通的冲洗喷头以及用于调节所述冲洗喷头的冲洗角度的调节装置。
2.根据权利要求1所述的用于全面清淤的高效清淤机器人,其特征在于:所述调节装置包括与所述冲洗喷头的底部连接的用于驱动所述冲洗喷头沿竖直方向转动的竖直角度调节组件、设置于所述竖直角度调节组件与所述支撑平台之间的水平角度调节组件。
3.根据权利要求2所述的用于全面清淤的高效清淤机器人,其特征在于:所述竖直角度调节组件包括与所述冲洗喷头连接的连接杆、带动所述连接杆沿竖直方向转动的转轴以及驱动所述转轴转动的第一电机;所述水平角度调节组件包括设置于所述竖直角度调节组件底部的水平转盘以及用于驱动所述水平转盘转动的第二电机。
4.根据权利要求1所述的用于全面清淤的高效清淤机器人,其特征在于:所述支撑平台上远离所述铲斗的一端设置有用于固定摄像装置的云台;所述摄像装置设置于所述云台上,所述摄像装置的观测方向根据所述云台的转动进行变化。
5.根据权利要求4所述的用于全面清淤的高效清淤机器人,其特征在于:所述摄像装置上方设置有挡板,用于防止冲洗后顶部残留的水滴影响所述摄像装置的运行。
6.根据权利要求1所述的用于全面清淤的高效清淤机器人,其特征在于:所述支撑平台上设置有支撑组件;所述机械臂的一端与所述铲斗连接,另一端与所述支撑组件连接。
7.根据权利要求6所述的用于全面清淤的高效清淤机器人,其特征在于:所述机械臂通过直线液压缸进行旋转调节,所述直线液压缸的一端与所述机械臂连接,另一端与所述支撑组件连接。
8.根据权利要求1所述的用于全面清淤的高效清淤机器人,其特征在于:所述铲斗的侧壁设置有若干个用于沥水的小孔。
9.根据权利要求1所述的用于全面清淤的高效清淤机器人,其特征在于:所述支撑平台上方设置有用于装料的料斗。
10.根据权利要求9所述的用于全面清淤的高效清淤机器人,其特征在于:所述料斗与所述支撑平台之间设置有用于控制所述料斗高度的伸缩架。
技术总结
本技术提供了一种用于全面清淤的高效清淤机器人,包括履带行走装置、设置于所述履带行走装置前方的铲斗、设置于所述履带行走装置上方的支撑平台、设置于所述支撑平台两侧的机械臂以及设置于所述履带行走装置和所述支撑平台之间的用于驱动所述支撑平台旋转的旋转装置;所述支撑平台上靠近所述铲斗的一端设置有冲洗装置,所述冲洗装置包括与外部高压水管相连通的冲洗喷头以及用于调节所述冲洗喷头的冲洗角度的调节装置。通过上述方式,本技术能够利用旋转装置驱动支撑平台进行旋转,使铲斗能够对暗涵底部各个方向的淤积物进行有效清理,同时利用冲洗装置对暗涵顶部及侧壁上的淤积物进行冲刷,简便高效地实现全面清淤。
技术研发人员:林刚,汤丁丁,刘学进,湛德,汪小东,秦长金,郭二卫,赵皇,史诗乐,王媛
受保护的技术使用者:中建三局绿色产业投资有限公司
技术研发日:20221221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!