作业机械的控制系统及作业机械的控制方法与流程
本公开涉及作业机械的控制系统及作业机械的控制方法。
背景技术:
1、专利文献1公开了作业机械的一个示例,该作业机械为了实现作业机械的作业自动化,而能够良好地测量其与作业对象的相对位置。在专利文献1中,基于三维测量装置的测量数据,来对轮式装载机与作业对象的相对位置进行测量。
2、专利文献1:日本特开2019-132068号公报
技术实现思路
1、在作业自动化中,需要对作业机械的作业对象的有无进行高精确度地检测。然而,三维测量装置容易受到例如粉尘、雨、灯光或直射日光等外部干扰的影响。
2、本公开的形态的目的在于更高精确度地检测作业对象的有无。
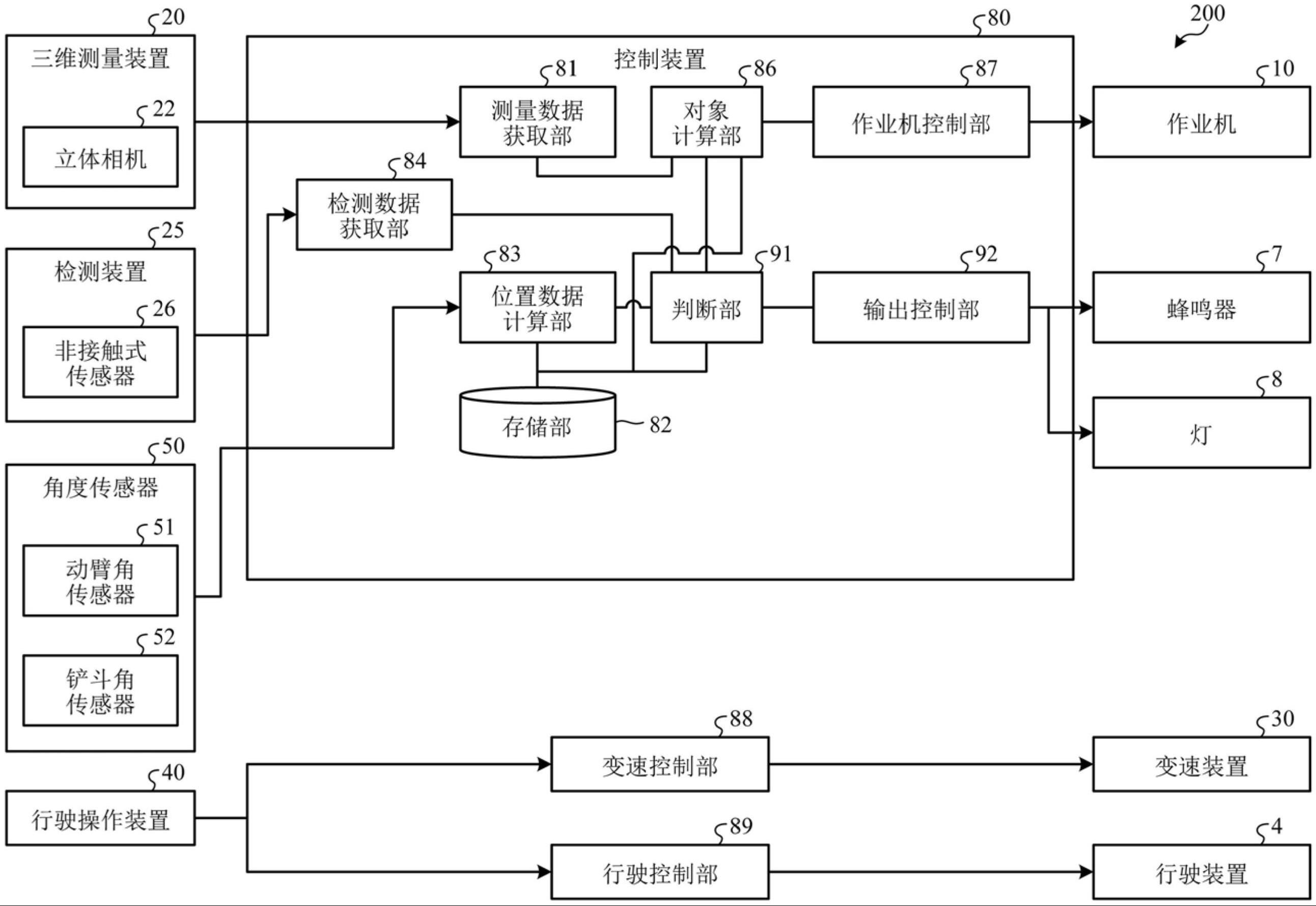
3、根据本公开的形态,提供一种作业机械的控制系统,其具备:三维测量装置,其用于测量作业机械的作业对象;检测装置,其用于检测所述作业对象;以及干预控制部,其在所述三维测量装置及所述检测装置双方均检测到所述作业对象时,进行作业机械的干预控制。
4、根据本公开的形态,提供一种作业机械的控制方法,其在用于测量作业机械的作业对象的三维测量装置以及用于检测所述作业对象的检测装置双方均检测到所述作业对象时,进行作业机械的干预控制。
5、根据本公开的形态,能够更高精确度地检测作业对象的有无。
技术特征:
1.一种作业机械的控制系统,其特征在于,具备:
2.根据权利要求1所述的作业机械的控制系统,其特征在于,
3.根据权利要求1或2所述的作业机械的控制系统,其特征在于,具备:
4.根据权利要求1至3中任一项所述的作业机械的控制系统,其特征在于,具备:
5.根据权利要求1至4中任一项所述的作业机械的控制系统,其特征在于,
6.根据权利要求1至5中任一项所述的作业机械的控制系统,其特征在于,
7.根据权利要求1至5中任一项所述的作业机械的控制系统,其特征在于,
8.根据权利要求1至7中任一项所述的作业机械的控制系统,其特征在于,
9.根据权利要求1至8中任一项所述的作业机械的控制系统,其特征在于,
10.一种作业机械的控制方法,其特征在于,
11.根据权利要求10所述的作业机械的控制方法,其特征在于,
12.根据权利要求10或11所述的作业机械的控制方法,其特征在于,
13.根据权利要求10至12中任一项所述的作业机械的控制方法,其特征在于,
14.根据权利要求10至13中任一项所述的作业机械的控制方法,其特征在于,
15.根据权利要求10至14中任一项所述的作业机械的控制方法,其特征在于,
16.根据权利要求10至15中任一项所述的作业机械的控制方法,其特征在于,
技术总结
作业机械的控制系统具备:三维测量装置(20),其用于测量作业机械(1)的作业对象;检测装置(25),其用于检测作业对象;以及作为干预控制部的作业机控制部(87),其在三维测量装置(20)及检测装置(25)双方均检测到作业对象时,进行作业机械(1)的干预控制。
技术研发人员:尾崎将崇,关洋平,草香孝二,细田佑树
受保护的技术使用者:株式会社小松制作所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!