挖掘系统的制作方法
本发明涉及用于利用铲斗对挖掘对象物进行挖掘的挖掘系统。
背景技术:
1、例如在专利文献1等中,记载了使工程机械自动驾驶并利用铲斗对挖掘对象物进行挖掘的技术。在该文献所记载的技术中,从上部回转体观察时,利用铲斗从前方的位置向后方沿着挖掘列进行挖掘。而且,挖掘结束后,上部回转体会进行回转,并在新的挖掘列中进行挖掘。
2、在仅通过一次的挖掘动作进行某个挖掘列中的挖掘的情况下,例如会发生尽管铲斗内已塞满了挖掘对象物但仍继续进行挖掘等挖掘动作从而成为多余动作的情况。另一方面,在通过多次的挖掘动作进行某个挖掘列中的挖掘的情况下,例如会发生尽管残留于该挖掘列的挖掘对象物很少但仍进行挖掘等挖掘动作从而成为多余动作的情况。因此,希望提高挖掘作业的效率。
3、现有技术文献
4、专利文献
5、专利文献1:日本发明专利公开公报特开2001-123479号
技术实现思路
1、因此,本发明的目的在于提供能够提高自动驾驶中的挖掘作业的效率的挖掘系统。
2、挖掘系统包括:下部主体(下部行走体)、上部回转体、附属装置及控制器。所述上部回转体可回转地搭载于所述下部行走体。所述附属装置安装于所述上部回转体。所述附属装置具有对挖掘对象物进行挖掘的铲斗。所述控制器在相对于所述上部回转体向前方隔开间隔的位置设定边界。所述控制器控制所述铲斗,使得所述铲斗沿着在所述上部回转体的前后方向上延伸的挖掘列,向靠近所述上部回转体的方向,自动地对所述挖掘对象物进行挖掘。所述控制器,在所述铲斗进行的一次挖掘结束时的所述铲斗的位置处于比所述边界位于前方的情况下,不变更所述挖掘列而使所述铲斗进行下一次挖掘。所述控制器,在所述铲斗进行的一次挖掘结束时的所述铲斗的位置处于与所述边界相同的位置或比所述边界位于后方的情况下,变更所述挖掘列,并使所述铲斗进行下一次挖掘。
3、根据上述结构,能够提高自动驾驶中的挖掘作业的效率。
技术特征:
1.一种挖掘系统,其特征在于包括:
2.根据权利要求1所述的挖掘系统,其特征在于:
技术总结
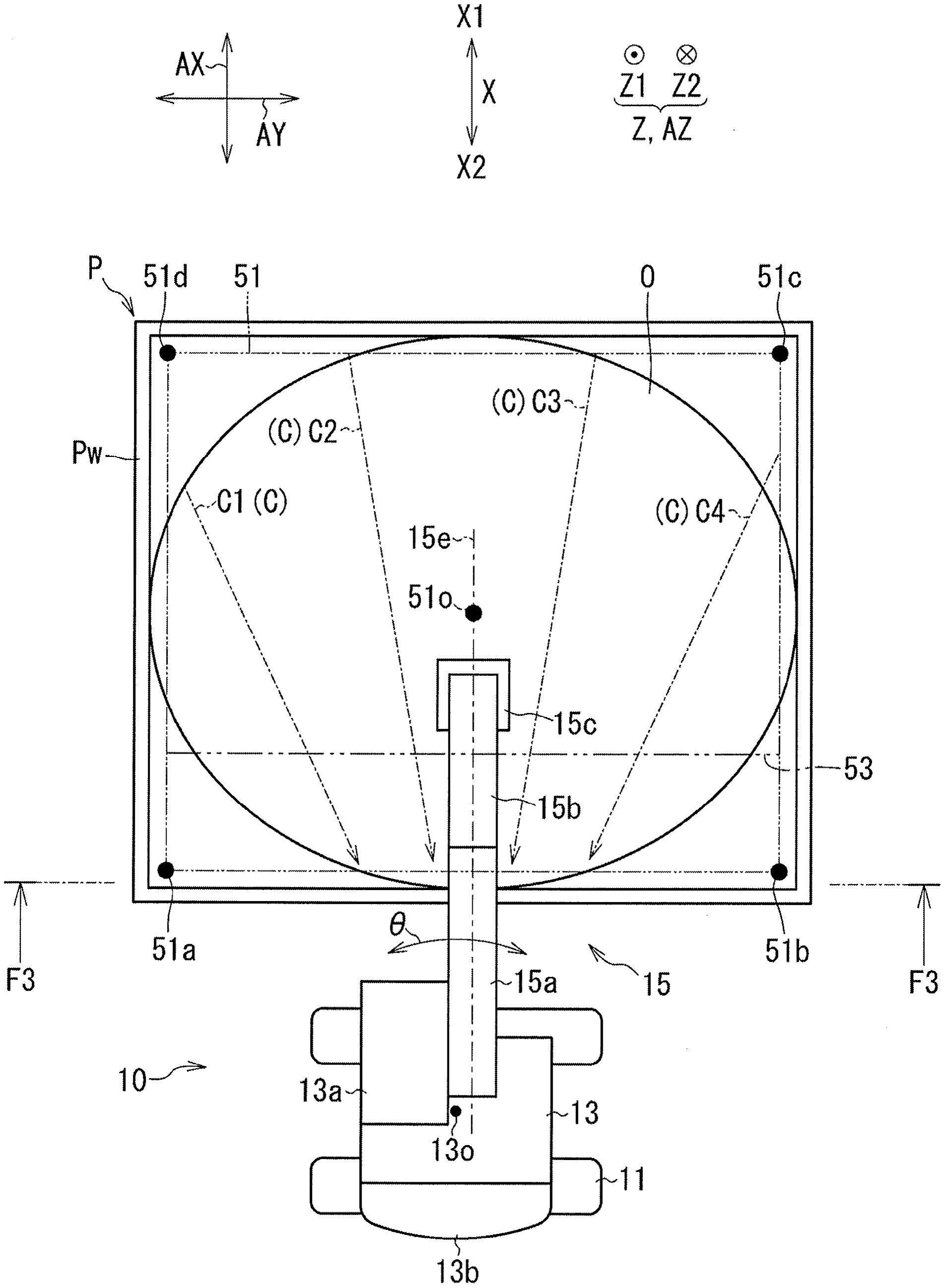
挖掘系统的控制器(30)以沿着挖掘列(C)对挖掘对象物(O)进行挖掘的方式来控制铲斗(15c)。在由铲斗(15c)进行的一次挖掘结束时的铲斗(15c)的位置处于边界(53)前方(X1)的情况下,控制器(30)不变更挖掘列(C)而使铲斗(15c)进行下一次挖掘。在由铲斗(15c)进行的一次挖掘结束时的铲斗(15c)的位置处于与边界(53)相同的位置或处于边界(53)后方(X2)的情况下,控制器(30)变更挖掘列(C),并使铲斗(15c)进行下一次挖掘。
技术研发人员:野田大辅,福尾展弘,秋山将贵,土井隆行
受保护的技术使用者:神钢建机株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!