用于控制作业机械的系统以及方法与流程
本发明涉及用于控制作业机械的系统以及方法。
背景技术:
1、在作业机械中具备推土铲等作业机。例如专利文献1的作业机械中,推土铲与车体利用左右的提升架连接。在左右的提升架分别连接有左右的俯仰·倾斜液压缸。通过使左右的俯仰·倾斜液压缸分别伸缩,推土铲倾斜动作。倾斜动作是推土铲的左右的端部的一方的高度与另一方的高度不同的方式使推土铲左右倾斜动作。
2、在先技术文献
3、专利文献
4、专利文献1:日本特开2014-31696号公报
技术实现思路
1、发明将要解决的课题
2、近年来,为了控制作业机等,作业机的规定部分的位置利用作业机械的控制器检测。因此,在作业机械中搭载有检测作业机的姿态的作业机传感器、检测架的姿态的架传感器。各传感器例如为加速度传感器,根据重力加速度,检测滚动角、俯仰角。在作业机的相对于车体的偏航角为零度的情况下,控制器基于架的长度、滚动角、俯仰角,作业机的滚动角和俯仰角、作业机中的规定部分的位置,能够计算相对于车体的作业机的规定部分的位置。
3、但是,在推土铲倾斜动作的情况下,通过使左右的架的一方摆动,左右的架的高度相互不同。在该情况下,左右的架的前端的位置在前后方向上相互偏移。因此,作业机的相对于车体的偏航角成为与零度不同的值。在该情况下,上述方法中,难以高精度地检测相对于车体的作业机的位置。
4、另一方面,根据上述加速度传感器,通过使起动时为0,角速度的累计,能够计算作业机的偏航角。但是,在其精度不高,并长时间使用的情况下,误差会变大。因此,利用加速度传感器,即便在检测偏航角的情况下,不容易高精度地检测相对于车体的作业机的位置。本发明的目的在于,即便由于作业机的动作而使作业机的偏航角发生变化,也能高精度地检测作业机械中作业机的规定部分的位置。
5、用于解决课题的手段
6、本发明的一方式的系统为用于控制作业机械的系统。作业机械包括车体、作业机架、作业机、第一促动器、第二促动器。作业机架包括第一架、第二架。第一架包括与车体连接的第一车体连接部。第二架包括与车体连接的第二车体连接部。第二架从第一架向左右方向分离配置。
7、作业机包括第一架连接部、第二架连接部、规定部分。第一架连接部与第一架连接。第二架连接部从第一架连接部向左右方向分离配置。第二架连接部与第二架连接。第一促动器使第一架相对于车体动作。第二促动器使第二架相对于车体动作。作业机为第一姿态下的相对于车体的作业机的偏航角与作业机为第二姿态下的作业机的偏航角不同。第二姿态与第一姿态不同。
8、系统具备作业机传感器、控制器。作业机传感器安装于作业机。作业机传感器检测作业机的滚动角、俯仰角。控制器取得表示第一车体连接部与第一架连接部之间的距离的实际架长度。控制器取得第一车体连接部的位置。控制器取得作业机的滚动角与俯仰角。
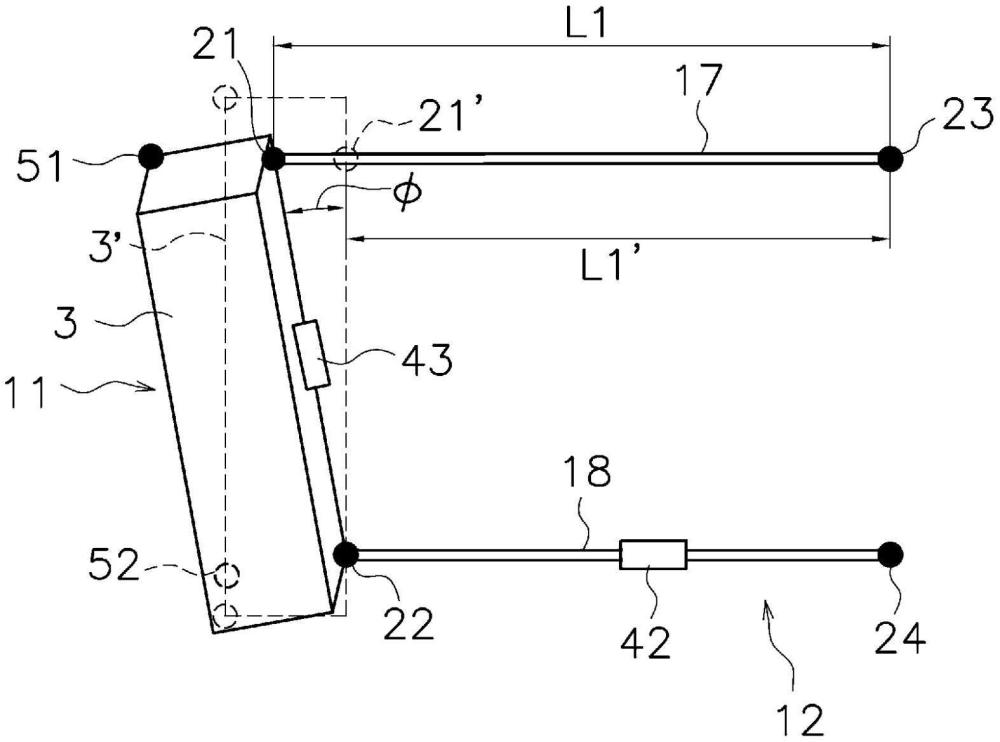
9、控制器在作业机为第一姿态时,基于作业机的滚动角、俯仰角,计算设想偏航角为规定角度时的第一架连接部的设想位置。控制器计算表示第一架连接部的设想位置与第一车体连接部之间的距离的设想架长度。控制器基于实际架长度与设想架长度的差量,计算第一姿态下的作业机的偏航角。控制器基于作业机的滚动角、俯仰角、第一姿态下的作业机的偏航角,计算作业机的规定部分的位置。
10、本发明的其他方式的方法为用于控制作业机械的方法。作业机械包括车体、作业机架、作业机、第一促动器、第二促动器。作业机架包括第一架、第二架。第一架包括与车体连接的第一车体连接部。第二架包括与车体连接的第二车体连接部。第二架从第一架向左右方向分离配置。
11、作业机包括第一架连接部、第二架连接部、规定部分。第一架连接部与第一架连接。第二架连接部从第一架连接部向左右方向分离配置。第二架连接部与第二架连接。作业机为第一姿态下的相对于车体的作业机的偏航角与作业机为第二姿态下的作业机的偏航角不同。第二姿态与第一姿态不同。
12、该方法包括:检测第一车体连接部的位置;检测作业机的滚动角、俯仰角;取得表示第一车体连接部与第一架连接部之间的距离的实际架长度;在作业机为第一姿态时,基于作业机的滚动角、俯仰角,计算设想偏航角为规定角度时的第一架连接部的设想位置;计算表示第一架连接部的设想位置与第一车体连接部之间的距离的设想架长度;基于实际架长度与设想架长度的差量,计算第一姿态下的作业机的偏航角;基于作业机的滚动角、俯仰角、第一姿态下的作业机的偏航角,计算作业机的规定部分的位置。
13、发明效果
14、根据本发明,根据设想作业机的偏航角为规定角度时的设想架长度与实际架长度的差量,计算作业机为第一姿态时的偏航角。由此,即便由于作业机的动作而使作业机的偏航角发生变化,也能够高精度地检测作业机械中作业机的位置。
技术特征:
1.一种系统,其用于控制作业机械,其特征在于,
2.如权利要求1所述的系统,其特征在于,
3.如权利要求1所述的系统,其特征在于,
4.如权利要求1所述的系统,其特征在于,
5.如权利要求1所述的系统,其特征在于,
6.如权利要求1所述的系统,其特征在于,
7.一种方法,其用于控制作业机械,其特征在于,
8.如权利要求7所述的方法,其特征在于,
9.如权利要求7所述的方法,其特征在于,
10.如权利要求7所述的方法,其特征在于,
技术总结
系统具备作业机传感器、控制器。作业机传感器检测作业机的滚动角与俯仰角。控制器取得表示第一车体连接部与第一架连接部之间的距离的实际架长度。控制器在作业机为第一姿态时,基于作业机的滚动角与俯仰角,计算将偏航角设想为规定角度时的第一架连接部的设想位置。控制器计算表示第一架连接部的设想位置与第一车体连接部之间的距离的设想架长度。控制器基于实际架长度与设想架长度的差量,计算在第一姿态下的作业机的偏航角。控制器基于作业机的滚动角、俯仰角和在第一姿态下的作业机的偏航角,计算作业机的规定部分的位置。
技术研发人员:西原健,石桥永至,园田拓也
受保护的技术使用者:株式会社小松制作所
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!