用于摆动动臂式挖掘机的竖直轴接头部角度估计的基于IMU的系统的制作方法
本发明总体上涉及用于摆动动臂式挖掘机的竖直轴接头部角度估计,并且具体地涉及用于摆动动臂式挖掘机的竖直轴接头部角度估计的基于imu(惯性测量单元)的系统。
背景技术:
1、引导系统和自动定位控制系统在建筑、采矿和农业机械中已经变得越来越流行。例如,在摆动动臂式挖掘机中,引导系统可以提高操作者的意识,而自动定位控制系统可以减轻挖掘机导航和定位摆动动臂的复杂性。为了实现这种引导系统和自动定位控制系统,对摆动动臂的每个接头部之间的接头部角度进行准确估计非常重要。
2、在一种传统方法中,陀螺仪用于测量运动并确定动臂的接头部之间的角度。然而,这种传统陀螺仪由于陀螺仪偏置而遭受漂移。加速度计可以用于校正这种漂移。然而,加速度计无法充分校正针对竖直或接近竖直的接头部的陀螺仪偏差。这是因为,与在水平轴上的投影足够大的轴不同,即使接头部角度发生变化,加速度计输出的力也保持不变。
技术实现思路
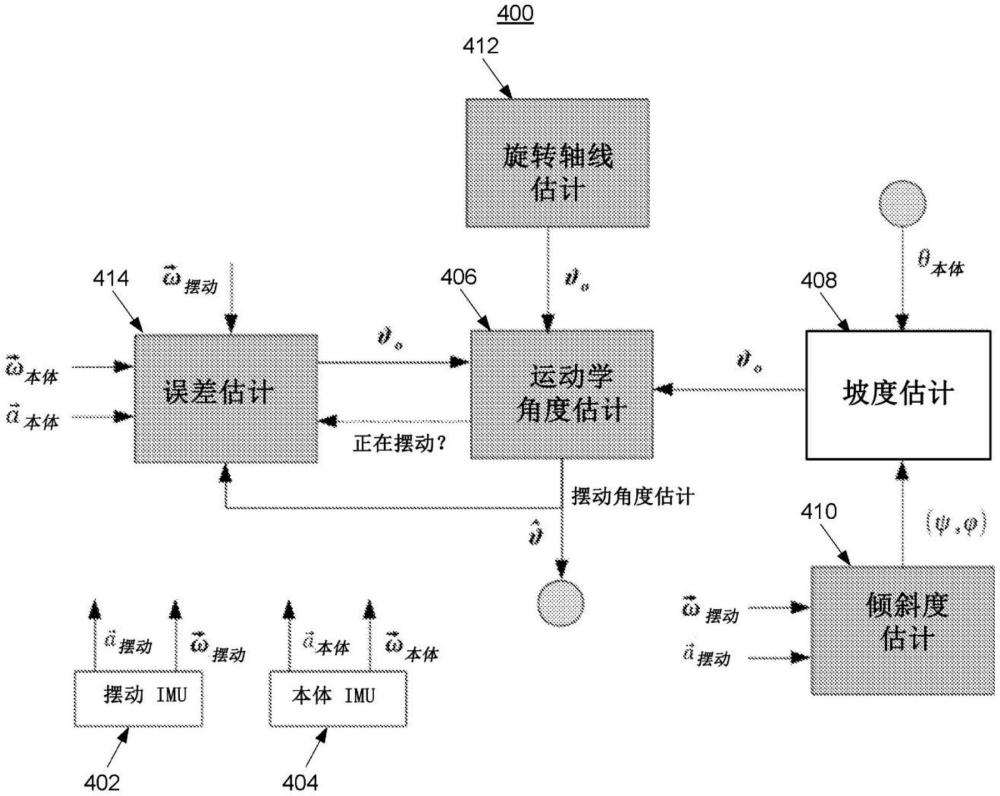
1、根据一个或更多个实施方式,提供了用于对车辆的摆动动臂的摆动角度进行确定的系统和方法。从传感器接收传感器数据,所述传感器设置在车辆的摆动动臂和本体上。基于传感器数据来对摆动动臂相对于本体是静止的还是正在移动进行确定。响应于确定摆动动臂是静止的,基于观测到的摆动角度来对接收到的传感器数据进行校正,并且基于校正后的传感器数据来对估计的摆动角度进行计算。响应于确定摆动动臂正在移动,基于接收到的传感器数据来对估计的摆动角度进行计算。输出估计的摆动角度。
2、在一个实施方式中,通过以下确定摆动动臂相对于本体是静止的还是正在移动:对从传感器接收到的信号的能量进行计算;将所计算出的能量与一个或更多个阈值进行比较;以及基于所述比较来确定摆动动臂相对于本体是静止的还是正在移动。
3、在一个实施方式中,对接收到的传感器数据进行校正包括:将观测到的摆动角度与最新的估计的摆动角度进行比较,以及基于所述比较来从传感器数据中消除偏差。
4、在一个实施方式中,确定估计的摆动角度超过车辆的摆动限制,以及对用于对估计的摆动角度进行计算的卡尔曼滤波器进行重置。
5、在一种实施方式中,通过以下对观测到的摆动角度进行计算:对传感器的旋转轴线进行确定;以及基于所确定的旋转轴线来对观测到的摆动角度进行计算。在另一实施方式中,通过以下来对观测到的摆动角度进行计算:对由传送对准引起的摆动角度误差进行确定并且基于摆动角度误差来对观测到的摆动角度进行计算。在另一实施方式中,通过以下来对观测到的摆动角度进行计算:响应于确定车辆位于满足坡度阈值的斜坡上,基于车辆的侧倾(roll)和俯仰(pitch)来对观测到的摆动角度进行计算。
6、在一个实施方式中,传感器是惯性测量单元(imu)。在一个实施方式中,车辆是挖掘机。
7、通过参考下面的详细描述和附图,本发明的这些和其他优点对于本领域普通技术人员来说将是明显的。
技术特征:
1.一种计算机实现的方法,所述计算机实现的方法包括:
2.根据权利要求1所述的计算机实现的方法,其中,基于所述传感器数据来确定所述摆动动臂相对于所述本体是静止的还是正在移动包括:
3.根据权利要求1所述的计算机实现的方法,其中,基于观测到的摆动角度来对接收到的传感器数据进行校正并且基于校正后的传感器数据来对估计的摆动角度进行计算包括:
4.根据权利要求1所述的计算机实现的方法,所述计算机实现的方法还包括:
5.根据权利要求1所述的计算机实现的方法,所述计算机实现的方法还包括通过以下对所述观测到的摆动角度进行计算:
6.根据权利要求1所述的计算机实现的方法,所述计算机实现的方法还包括通过以下对所述观测到的摆动角度进行计算:
7.根据权利要求1所述的计算机实现的方法,所述计算机实现的方法还包括通过以下对所述观测到的摆动角度进行计算:
8.根据权利要求1所述的计算机实现的方法,其中,所述传感器是惯性测量单元(imu)。
9.根据权利要求1所述的计算机实现的方法,其中,所述车辆是挖掘机。
10.一种系统,所述系统包括:
11.根据权利要求10所述的系统,其中,基于所述传感器数据来确定所述摆动动臂相对于所述本体是静止的还是正在移动包括:
12.根据权利要求10所述的系统,其中,基于观测到的摆动角度来对接收到的传感器数据进行校正并且基于校正后的传感器数据来对估计的摆动角度进行计算包括:
13.根据权利要求10所述的系统,所述操作还包括:
14.根据权利要求10所述的系统,所述操作还包括通过以下对所述观测到的摆动角度进行计算:
15.一种非暂态计算机可读介质,所述非暂态计算机可读介质存储有计算机程序指令,所述计算机程序指令在由处理器执行时使所述处理器执行包括以下的操作:
16.根据权利要求15所述的非暂态计算机可读介质,所述操作还包括通过以下对所述观测到的摆动角度进行计算:
17.根据权利要求15所述的非暂态计算机可读介质,所述操作还包括:通过以下对所述观测到的摆动角度进行计算:
18.根据权利要求15所述的非暂态计算机可读介质,其中,所述传感器是惯性测量单元(imu)。
19.根据权利要求15所述的非暂态计算机可读介质,其中所述车辆是挖掘机。
20.一种挖掘机,所述挖掘机包括:
技术总结
提供了用于确定车辆的摆动动臂的摆动角度的系统和方法。从传感器接收传感器数据,所述传感器设置在车辆的摆动动臂和本体上。基于传感器数据来确定摆动动臂相对于本体是静止的还是正在移动。响应于确定摆动动臂是静止的,基于观测到的摆动角度来对接收到的传感器数据进行校正,并且基于校正后的传感器数据来对估计的摆动角度进行计算。响应于确定摆动动臂正在移动,基于接收到的传感器数据来对估计的摆动角度进行计算。输出估计的摆动角度。
技术研发人员:谢哈布·卡兰塔尔
受保护的技术使用者:拓普康定位系统公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!