远程操作系统以及远程操作复合系统的制作方法
本发明涉及具有分别与作业机械和用于对该作业机械进行远程操作的远程操作装置进行通信的相互通信功能的远程操作系统。
背景技术:
1、以往,设置多个对作业机械的周围进行拍摄的摄像头、或者能够以相互不同的角度拍摄该作业机械的摄像头,使用由该多个摄像头拍摄到的多个拍摄图像来生成作业机械的俯视图像。
2、作为这样的作业机械的一例,例如在专利文献1中公开了一种液压挖掘机,其具备:拍摄液压挖掘机的周围的多个摄像头、和基于由多个摄像头拍摄到的图像来生成俯瞰图像的俯瞰图像生成部。
3、另外,例如,液压挖掘机等作业机械具备下部行驶体、和能够相对于该下部行驶体回转的上部回转体。另外,在上部回转体设置有构成司机室的驾驶室。
4、在这样的作业机械中,通过上部回转体相对于下部行驶体回转,驾驶室的正面方向与作业机械的前进方向或后退方向有可能成为相互不同的方向。因此,存在操作员难以知道在进行了行驶操作时作业机械向哪个方向行进的问题。
5、因此,在设置于驾驶室内的监控器上用箭头表示作业机械的行进方向。例如,在专利文献2中公开了一种工程机械的监控装置,其上部回转体能够相对于下部行驶体回转,并且具备对机械周边进行拍摄的摄像头,在配置于驾驶室内的监控画面上显示所述摄像头拍摄到的图像。
6、现有技术文献
7、专利文献
8、专利文献1:日本特开2020-112030号公报
9、专利文献2:日本专利第5473870号公报
技术实现思路
1、发明要解决的技术问题
2、然而,操作员难以仅通过观察该俯瞰图像来识别下部行驶体的前后方向。因此,存在操作员为了识别下部行驶体的前后方向而不得不使下部行驶体前进或后退的问题。
3、另外,在专利文献2的监控装置中,根据显示于监控画面的图像的时间变化,推定下部行驶体相对于上部回转体的相对角度。因此,存在需要复杂的图像处理以推定相对角度、处理负荷变高的问题。
4、本发明是鉴于上述问题而完成的发明,其目的在于提供一种能够实现处理负荷的减轻且能够以简易的构成表示作业机械的前进方向或后退方向的远程操作系统以及包含该远程操作系统的远程操作复合系统。
5、用于解决上述技术问题的方案
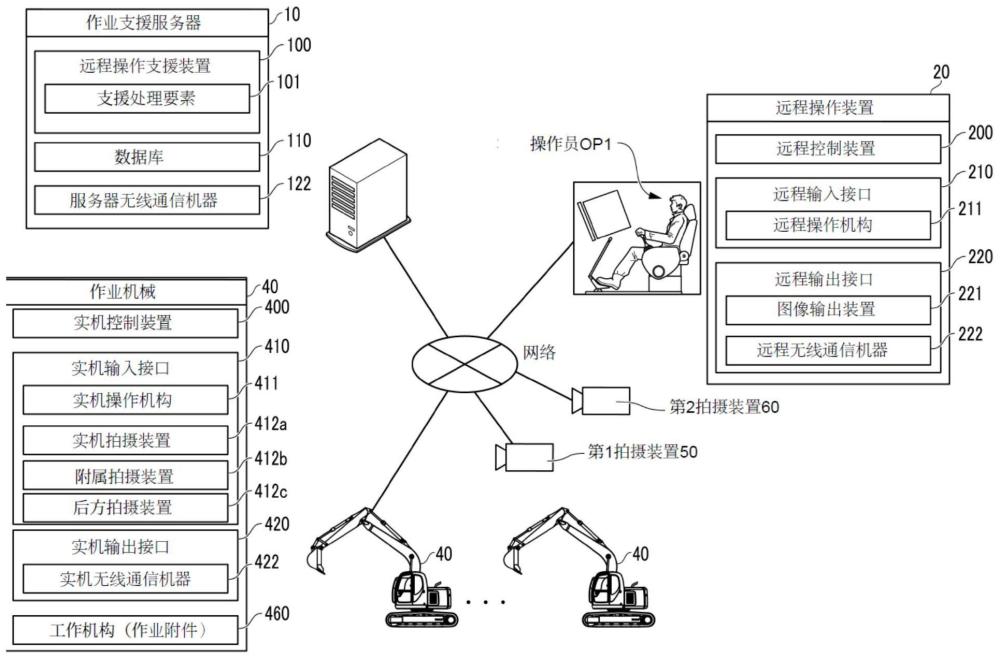
6、为了达成该目的,本发明的远程操作系统具有分别与作业机械和远程操作装置进行通信的相互通信功能,所述作业机械具有下部行驶体和能够相对于所述下部行驶体回转的上部回转体,所述远程操作装置用于对所述作业机械进行远程操作,所述远程操作系统具有支援处理要素,所述支援处理要素将基于通过配置于所述作业机械周围的拍摄装置而取得的拍摄图像中的所述下部行驶体的映入状态、和在所述下部行驶体的前后方向上偏在地配置的指定构成要素的映入状态而生成的、表示所述下部行驶体的前后方向的至少一方的指标图像至少部分地重叠于所述拍摄图像中的所述作业机械或其周围而得到的合成图像发送至所述远程操作装置。
7、另外,本发明的远程操作复合系统由所述远程操作系统、和所述远程操作装置以及所述作业机械中的至少一方构成。
8、根据本发明的远程操作系统以及远程操作复合系统,生成在拍摄图像上重叠有表示作业机械的下部行驶体的前后方向的指标图像的合成图像,该合成图像被发送至远程操作装置,由此操作员能够通过目视该合成图像容易地掌握作业机械的下部行驶体的前后方向。
技术特征:
1.一种远程操作系统,具有分别与作业机械和远程操作装置进行通信的相互通信功能,所述作业机械具有下部行驶体和能够相对于所述下部行驶体回转的上部回转体,所述远程操作装置用于对所述作业机械进行远程操作,所述远程操作系统的特征在于,
2.如权利要求1所述的远程操作系统,其特征在于,
3.如权利要求1或2所述的远程操作系统,
4.如权利要求3所述的远程操作系统,其特征在于,
5.如权利要求2~4的任一项所述的远程操作系统,
6.如权利要求1~5的任一项所述的远程操作系统,
7.如权利要求1~6的任一项所述的远程操作系统,
8.如权利要求1~7的任一项所述的远程操作系统,
9.如权利要求1~8的任一项所述的远程操作系统,
10.如权利要求1~9的任一项所述的远程操作系统,
11.如权利要求1~10的任一项所述的远程操作系统,
12.一种远程操作复合系统,其由权利要求1~11的任一项所述的远程操作系统、和所述远程操作装置及所述作业机械中的至少一方构成。
技术总结
本发明提供一种远程操作系统,能减轻处理负荷,以简易的构成示出作业机械的下部行驶体的前后方向。远程操作系统具有分别与作业机械(40)和远程操作装置(20)通信的相互通信功能,作业机械(40)具有下部行驶体(430)和能够相对于下部行驶体(430)回转的上部回转体(450),远程操作装置(20)用于对作业机械(40)进行远程操作。远程操作系统具有支援处理要素(101),支援处理要素(101)将基于通过配置于作业机械周围的拍摄装置而取得的拍摄图像中下部行驶体(430)的映入状态、和在下部行驶体(430)的前后方向上偏在地配置的指定构成要素的映入状态而生成的、表示下部行驶体(430)的前后方向的至少一方的指标图像至少部分地重叠于拍摄图像中作业机械(40)或其周围而得到的合成图像发送至远程操作装置(20)。
技术研发人员:佐佐木均,佐伯诚司,山崎洋一郎
受保护的技术使用者:神钢建机株式会社
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!