操作反作用力控制系统以及操作反作用力控制方法与流程
本发明涉及下述技术:为了使作业机械或其构成元件向正负的动作方向动作而对由操作员向正负的操作方向操作的操作机构作用相对于其操作力的操作反作用力。
背景技术:
1、以配置在设置于工程机械的驾驶席的左侧和/或右侧的杆支承部件为支轴的上下方向以及左右方向的转动机构通过杆而转动。并提出有以下一种操作杆装置:此时,该操作杆装置以该转动机构的转动轴线通过杆把手的由操作员把持的把持中心部的方式倾斜地配置(例如,参照专利文献1)。
2、然而,在操作员进行肘的伸展、弯曲动作和内旋、外旋动作中,肌肉的活动方式不同,因此,该操作员对向上方和向下方各自的操作感觉到的反作用力不同。因此,操作员难以掌握杆向各个方向的操作量,有可能导致其操作性降低。
3、还提出有以下一种操作杆装置:在工程机械的操作杆的把持部侧设置有供操作员用其指尖进行按压操作的前、后、左和右的开关部构成的十字型开关(例如,参照专利文献2)。由此,能够实现减轻操作员在操作工程机械时的手臂疲劳。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2003-184128号公报
7、专利文献2:日本特开2000-204599号公报
技术实现思路
1、发明要解决的课题
2、然而,指尖对十字型开关的按压操作要求精细且准确地使用手指,因此存在操作员的心理负荷增大、工程机械的作业效率降低的可能性。
3、因此,本发明的目的在于提供一种能够实现提高操作员对操作机构的操作性的系统等。
4、用于解决课题的手段
5、本发明的操作反作用力控制系统是通过下述方式构成的操作反作用力控制系统,为了使构成控制对象的作业机械或者其构成元件分别向彼此反向的正动作方向以及负动作方向动作而控制致动器的动作,以使具有与操作方式检测传感器检测到的操作量的大小对应的强弱的操作反作用力沿下述方向作用到操作机构上,该方向是与操作员分别向彼此反向的正操作方向以及负操作方向进行操作的所述操作机构的通过该操作方式检测传感器检测到的操作方向对应的方向,
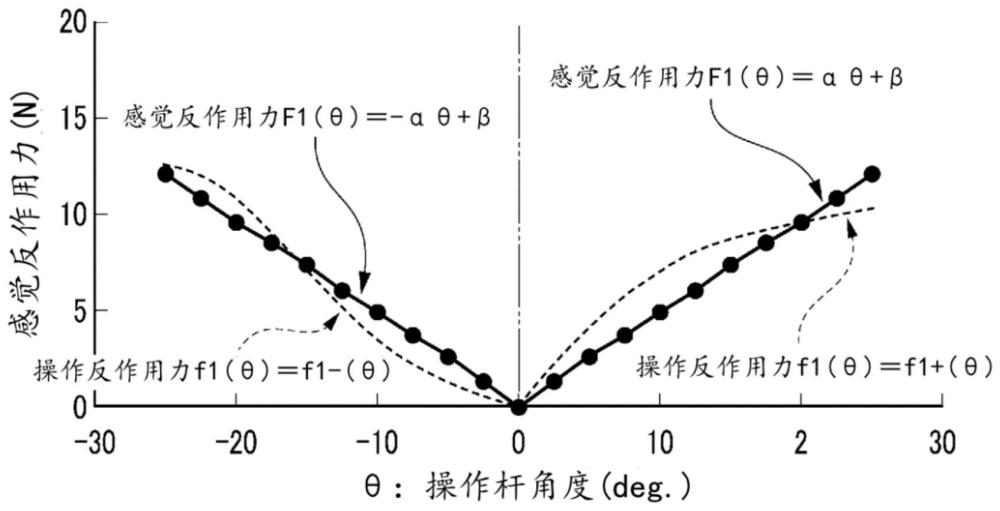
6、所述操作反作用力控制系统通过下述方式构成:对应于所述操作机构的所述正操作方向以及所述负操作方向各自的操作量,以所述操作员经由所述操作机构而感觉到的操作反作用力即感觉反作用力以所述操作机构的操作量0为基准至少部分地实现对称性的方式,控制所述致动器的动作,从而使与其操作量对应的操作反作用力沿所述正操作方向以及所述负操作方向分别作用于所述操作机构。
7、根据具有该结构的操作反作用力控制系统,对应于操作机构的彼此反向的正操作方向和负操作方向各自的操作量来控制致动器的动作,由此将操作反作用力作用于该操作机构。此时,以操作员经由操作机构感觉到的反作用力(感觉反作用力)在正操作方向的操作量范围(正的定义域)以及负操作方向的操作量范围(负的定义域)中至少部分地实现以操作量0为基准的对称性的方式,控制致动器的动作,进而控制作用于操作机构的操作反作用力。即,控制操作反作用力f(x),以使绝对值与正操作方向的操作量+x相等的负操作方向的操作量-x所分别对应的感觉反作用力f(+x)和f(-x)分别相等。由此,分别针对彼此反向的正操作方向以及负操作方向,实现了操作机构的操作量与操作员的感觉反作用力之间的均等或者匹配,从而相应地实现了提高该操作员对操作机构的操作性。
技术特征:
1.一种操作反作用力控制系统,其特征在于,通过下述方式构成,
2.根据权利要求1所述的操作反作用力控制系统,其特征在于,
3.根据权利要求1或2所述的操作反作用力控制系统,其特征在于,
4.根据权利要求1至3中任一项所述的操作反作用力控制系统,其特征在于,
5.根据权利要求1至4中任一项所述的操作反作用力控制系统,其特征在于,具备所述致动器以及所述操作方式检测传感器。
6.一种操作反作用力控制方法,其特征在于,包括以下各工序:
技术总结
本发明提供一种能够实现提高操作员对操作机构的操作性的系统等。通过控制致动器(214)的动作来控制作用于操作杆(2111、2112)的操作反作用力f<subgt;1</subgt;(θ)、f<subgt;2</subgt;(φ)。此时,控制操作反作用力f<subgt;1</subgt;(θ)、f<subgt;2</subgt;(φ),以使操作员经由操作杆(2111、2112)感觉到的彼此反向的操作方向上的各个反作用力F<subgt;1</subgt;(θ)、F<subgt;2</subgt;(φ)在正操作方向的操作量范围以及负操作方向的操作量范围中以操作量0为基准实现对称。
技术研发人员:关塚良太,伊藤卓,栗田雄一
受保护的技术使用者:神钢建机株式会社
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!