一种姿态自适应水下清淤机器人的制作方法
本发明涉及水下清淤,具体而言,涉及一种姿态自适应水下清淤机器人。
背景技术:
1、目前水下清淤机器人行走机构一般采用履带,结构复杂,而且无法实现水下悬浮和水面行走等,只能在水底进行清淤作业。公开号为cn115627809a的发明专利申请公开了一种智能清淤机器人及清淤系统,包括架体、吸泥机构、驱动机构、动力源、监控机构和推进机构,架体包括上下设置盖体和滑靴,盖体固定安装在滑靴上表面并与滑靴之间形成容置空间,驱动机构和动力源安装在所述容置空间内,吸泥机构和推进机构安装在架体上。利用矢量推进器与滑靴的配合实现了水下悬浮以及水面行走清淤作业,使得清淤机器人由传统的水下底部作业升级成水下底部、水下悬浮及水面作业三种模式以及水下悬浮时的三维空间作业的模式。
2、但是,在水下悬浮清淤过程中,当水下清淤机器人遇到强水流的冲击时,容易失去平衡而发生摇晃,严重时会改变清淤轨迹,影响清淤进程;当水下清淤机器人因速度过快撞到水下墙壁或者水下设备时,会损坏水下清淤机器人表面的壳体结构。
3、有鉴于此,本发明人针对这一需求展开深入研究,遂有本案产生。
技术实现思路
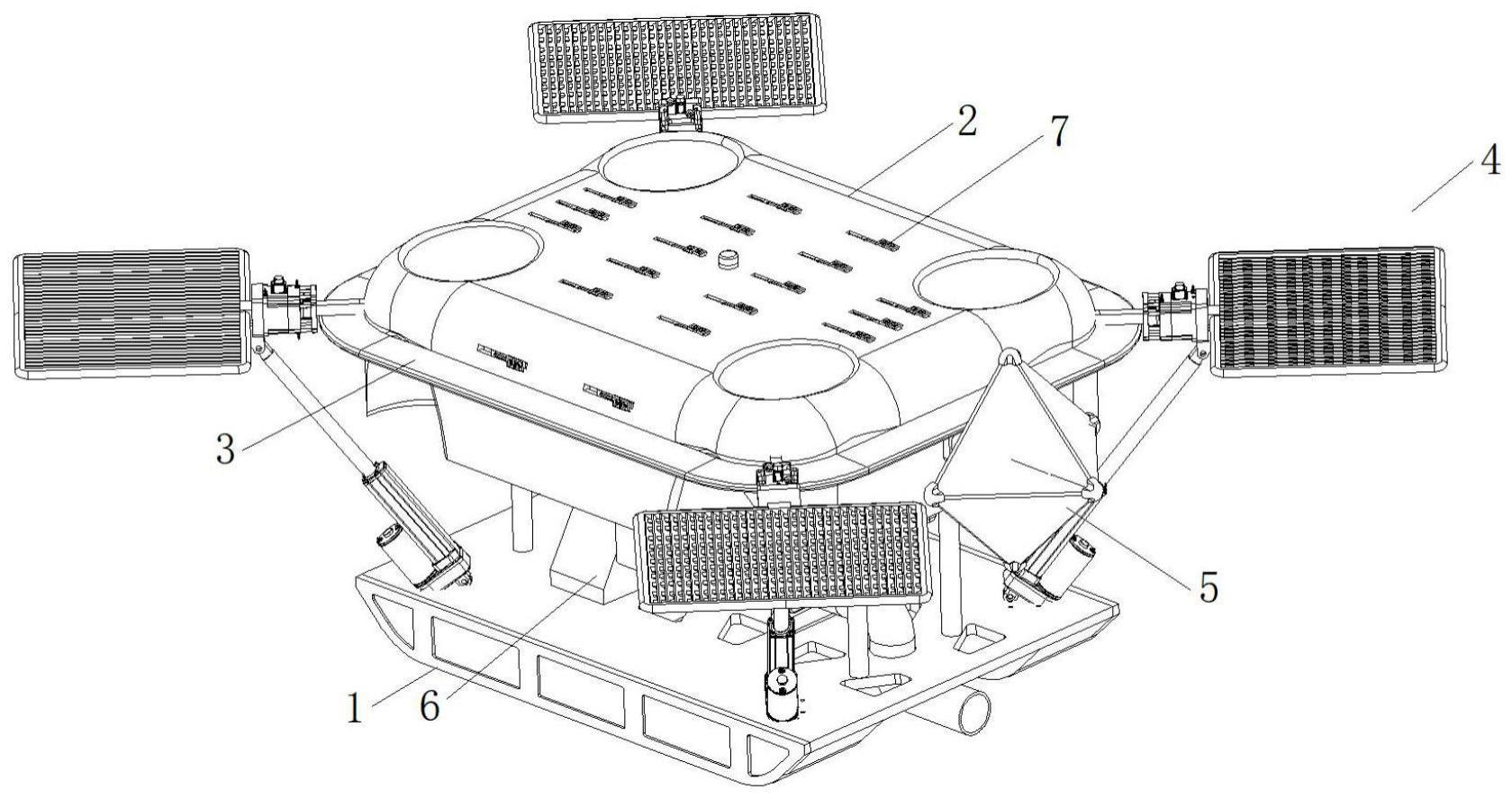
1、为克服现有技术中朋下清淤机器人遇到强水流的冲击时,容易失去平衡而发生摇晃,及撞到水下墙壁或者水下设备时,会损坏水下清淤机器人表面的壳体结构的问题,本发明提供了一种姿态自适应水下清淤机器人,包括滑靴机构和浮体盖板,所述浮体盖板下表面固定安装在所述滑靴机构上表面,所述浮体盖板外圆周方向上均匀分布有若干姿态自适应调整格栅舵,所述姿态自适应调整格栅舵包括格栅舵主体和用于驱动所述格栅舵主体摆动的驱动组件,所述格栅舵主体安装在所述驱动组件上。
2、优选地,所述驱动组件包括旋转电机组件和电动推杆组件,所述旋转电机组件通过第一水平轴轴连接在所述浮体盖板上,所述格栅舵主体一侧边中间固定安装在所述旋转电机组件输出端,所述格栅舵主体所在平面与所述旋转电机组件的旋转轴平行;所述电动推杆组件通过第二水平轴轴连接在所述滑靴机构上表面,所述格栅舵主体通过第三水平轴轴连接在所述电动推杆组件输出端;所述第三水平轴位于所述格栅舵主体下方位置处。
3、优选地,还包括格栅舵安装座,所述格栅舵主体通过所述格栅舵安装座安装在所述旋转电机组件输出端和所述电动推杆组件输出端上;
4、格栅舵安装座设置有用于安装所述旋转电机组件的旋转轴的第一安装孔和用于安装所述第三水平轴的第二安装孔,所述第二安装孔位于第一安装孔下方位置,且所述第二安装孔轴线方向与所述第一安装孔轴线方向垂直;所述格栅舵安装座固定安装在所述格栅舵主体一侧边中间位置。
5、优选地,所述旋转电机组件包括旋转电机和电机安装轴,所述电机安装轴通过所述第一水平轴轴连接在所述浮体盖板上,所述旋转电机固定安装在所述电机安装轴上,所述旋转电机的旋转轴固定安装在所述第一安装孔上。
6、优选地,所述电动推杆组件包括推杆安装架、驱动电机和推杆,所述驱动电机和所述推杆安装在所述推杆安装架上,所述推杆安装架通过第二水平轴轴连接在所述滑靴机构上表面,所述推杆一端安装在所述推杆安装架上,另一端通过第三水平轴轴连接在所述第二安装孔上。
7、优选地,所述格栅舵安装座包括一体化连接的主体安装板和三角安装板,所述第一安装孔设置在所述主体安装板中心位置,所述格栅舵主体固定安装在所述主体安装板一侧所述第一安装孔位置处,所述旋转电机组件的旋转轴从远离所述格栅舵主体一侧安装在所述第一安装孔内;所述主体安装板所在平面与所述格栅舵主体所在平面垂直;
8、两个所述三角安装板并排间隔设置在所述主体安装板一侧下部,且所述三角安装板所在平面与所述主体安装板所在平面垂直;两个所述三角安装板上同一位置设置有所述第二安装孔,所述第二安装孔位于所述主体安装板下方位置处,且所述第三水平轴通过所述第二安装孔将所述格栅舵安装座轴连接在所述电动推杆组件输出端上。
9、优选地,所述三角安装板所在平面与所述格栅舵主体所在平面垂直,且所述三角安装板一边设置在所述格栅舵主体下表面且与所述格栅舵主体所在平面所在平面平行。
10、优选地,所述格栅舵主体包括格栅舵框架和与所述旋转电机组件的旋转轴轴线方向平行的若干条纵向格舵,所述纵向格舵沿与其长度方向垂直方向均匀分布在所述格栅舵框架内,所述纵向格舵所在平面与所述格栅舵主体所在平面的夹角呈30-60°。
11、优选地,两条所述纵向格舵中间沿长度方向均匀设置有若干横向格舵,所述横向格舵所在平面与所述格栅舵主体所在平面平行。
12、优选地,所述浮体盖板外沿上可拆卸地套有防摇防撞鳍。
13、优选地,所述防摇防撞鳍包括环形鳍主体,所述环形鳍主体整体呈扁平状,且所述环形鳍主体厚度方向与所述环形鳍主体中心轴平行,宽度方向与所述环形鳍主体中心轴垂直。
14、有益效果:
15、采用本发明技术方案产生的有益效果如下:
16、(1)以流体力学作为基础理论,通过自平衡、抵抗强流体技术来为水下清淤机器人提供缓冲保护功能,采用格栅舵的设计来实现水下清淤机器人姿态的自适应调整,当遇到强水流冲击时,驱动组件驱动格栅舵主体摆动,调节格栅舵主体的方向,利用格栅舵的舵结构来改变强水流的作用方向,从而为机器人提供了保护的作用。
17、(2)在浮体盖板外沿设置防摇防撞鳍,使水下清淤机器人具有防摇和防撞功能,降低了外部环境对水下清淤机器人作业时的干扰,可对水下清淤机器人起到良好的保护作用。
技术特征:
1.一种姿态自适应水下清淤机器人,其特征在于,包括滑靴机构和浮体盖板,所述浮体盖板下表面固定安装在所述滑靴机构上表面,所述浮体盖板外圆周方向上均匀分布有若干姿态自适应调整格栅舵,所述姿态自适应调整格栅舵包括格栅舵主体和用于驱动所述格栅舵主体摆动的驱动组件,所述格栅舵主体安装在所述驱动组件上。
2.根据权利要求1所述的一种姿态自适应水下清淤机器人,其特征在于,所述驱动组件包括旋转电机组件和电动推杆组件,所述旋转电机组件通过第一水平轴轴连接在所述浮体盖板上,所述格栅舵主体一侧边中间固定安装在所述旋转电机组件输出端,所述格栅舵主体所在平面与所述旋转电机组件的旋转轴平行;所述电动推杆组件通过第二水平轴轴连接在所述滑靴机构上表面,所述格栅舵主体通过第三水平轴轴连接在所述电动推杆组件输出端;所述第三水平轴位于所述格栅舵主体下方位置处。
3.根据权利要求2所述的一种姿态自适应水下清淤机器人,其特征在于,还包括格栅舵安装座,所述格栅舵主体通过所述格栅舵安装座安装在所述旋转电机组件输出端和所述电动推杆组件输出端上;
4.根据权利要求3所述的一种姿态自适应水下清淤机器人,其特征在于,所述旋转电机组件包括旋转电机和电机安装轴,所述电机安装轴通过所述第一水平轴轴连接在所述浮体盖板上,所述旋转电机固定安装在所述电机安装轴上,所述旋转电机的旋转轴固定安装在所述第一安装孔上。
5.根据权利要求3所述的一种姿态自适应水下清淤机器人,其特征在于,所述电动推杆组件包括推杆安装架、驱动电机和推杆,所述驱动电机和所述推杆安装在所述推杆安装架上,所述推杆安装架通过第二水平轴轴连接在所述滑靴机构上表面,所述推杆一端安装在所述推杆安装架上,另一端通过第三水平轴轴连接在所述第二安装孔上。
6.根据权利要求3所述的一种姿态自适应水下清淤机器人,其特征在于,所述格栅舵安装座包括一体化连接的主体安装板和三角安装板,所述第一安装孔设置在所述主体安装板中心位置,所述格栅舵主体固定安装在所述主体安装板一侧所述第一安装孔位置处,所述旋转电机组件的旋转轴从远离所述格栅舵主体一侧安装在所述第一安装孔内;所述主体安装板所在平面与所述格栅舵主体所在平面垂直;
7.根据权利要求6所述的一种姿态自适应水下清淤机器人,其特征在于,所述三角安装板所在平面与所述格栅舵主体所在平面垂直,且所述三角安装板一边设置在所述格栅舵主体下表面且与所述格栅舵主体所在平面所在平面平行。
8.根据权利要求7所述的一种姿态自适应水下清淤机器人,其特征在于,所述格栅舵主体包括格栅舵框架和与所述旋转电机组件的旋转轴轴线方向平行的若干条纵向格舵,所述纵向格舵沿与其长度方向垂直方向均匀分布在所述格栅舵框架内,所述纵向格舵所在平面与所述格栅舵主体所在平面的夹角呈30-60°。
9.根据权利要求8所述的一种姿态自适应水下清淤机器人,其特征在于,两条所述纵向格舵中间沿长度方向均匀设置有若干横向格舵,所述横向格舵所在平面与所述格栅舵主体所在平面平行。
10.根据权利要求1所述的一种姿态自适应水下清淤机器人,其特征在于,所述浮体盖板外沿上可拆卸地套有防摇防撞鳍。
技术总结
本发明公开了一种姿态自适应水下清淤机器人,属于水下清淤技术领域,包括滑靴机构和浮体盖板,浮体盖板下表面固定安装在滑靴机构上表面,浮体盖板外圆周方向上均匀分布有若干姿态自适应调整格栅舵,姿态自适应调整格栅舵包括格栅舵主体和用于驱动格栅舵主体摆动的驱动组件,格栅舵主体安装在驱动组件上。本发明的有益效果是:以流体力学作为基础理论,通过自平衡、抵抗强流体技术来为水下清淤机器人提供缓冲保护功能,采用格栅舵的设计来实现水下清淤机器人姿态的自适应调整,当遇到强水流冲击时,驱动组件驱动格栅舵主体摆动,调节格栅舵主体的方向,利用格栅舵的舵结构来改变强水流的作用方向,从而为机器人提供了保护的作用。
技术研发人员:常颖,蔡芸,匡科,张红要,孙伟,李子逵,王彬,黎浚淇,仝慧敏,毕宇清,陈新智,罗健斌,付子康
受保护的技术使用者:广州市净水有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!