一种驾驶室翻转安全控制方法、系统及挖掘机与流程
本发明涉及一种驾驶室翻转安全控制方法、系统及挖掘机,属于工程机械。
背景技术:
1、在现有工程机械领域,需要翻转驾驶室进行检修的机型,在使用举升油缸抬起驾驶室后,一方面在动臂未处于落下姿态的情况下,容易与动臂相撞造成驾驶室损坏,另一方面为避免举升油缸出现内泄或外泄等问题导致驾驶室突然落下,会设有一个机械支撑杆,通过锁死机械支撑杆保证检修人员的安全,但仍有检修人员忘记使用机械支撑杆进行锁死。
2、现阶段主要依靠检修人员的操作习惯,很容易遗忘,造成驾驶室与动臂相撞,若忘记锁死机械支撑杆,更是容易发生人身安全事故。
3、依靠检修人员的操作习惯很容易忘记锁死支撑杆与放下动臂,造成安全事故。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种驾驶室翻转安全控制方法、系统及挖掘机,智能区分驾驶室翻转状态并进行警示,防止驾驶室翻转时,动臂未处于落下姿态的情况下,驾驶室与动臂相撞造成驾驶室损坏。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、第一方面,本发明提供一种驾驶室翻转安全控制方法,所述方法包括如下步骤:
4、获取举升油缸伸出长度;
5、获取动臂倾角;
6、若举升油缸伸出长度大于预设置的安全伸出长度,则判断驾驶室已处于翻转状态;
7、当判断驾驶室已处于翻转状态时,判断动臂倾角是否处于预设倾角范围内,若动臂倾角不处于预设倾角范围内,则控制报警器进行报警提示,控制驾驶室取消翻转。
8、进一步的,所述方法还包括:
9、若举升油缸伸出长度小于等于预设置的安全伸出长度,控制报警器停止报警。
10、进一步的,所述方法还包括:
11、若动臂倾角处于预设倾角范围内,控制举升油缸持续伸出,获取举升油缸伸出长度处于恒定值的时间;
12、当举升油缸伸出长度处于恒定值的时间小于预设值t时,控制举升油缸继续伸出直至最终位置。
13、进一步的,所述方法还包括:
14、当举升油缸伸出长度处于恒定值的时间大于预设值t时,获取分装在机械支撑杆末端和支撑杆卡槽上的接近开关a部分与接近开关b部分的开关量;
15、当开关量处于远离状态时,控制报警器发出报警信号。
16、进一步的,所述方法还包括:
17、当举升油缸伸出长度处于恒定值的时间大于预设值t时,获取分装在机械支撑杆末端和支撑杆卡槽上的接近开关a部分与接近开关b部分的开关量;
18、当开关量处于靠近状态时,控制报警器停止发出报警信号。
19、第二方面,本发明提供了一种驾驶室翻转安全控制系统,所述系统包括:
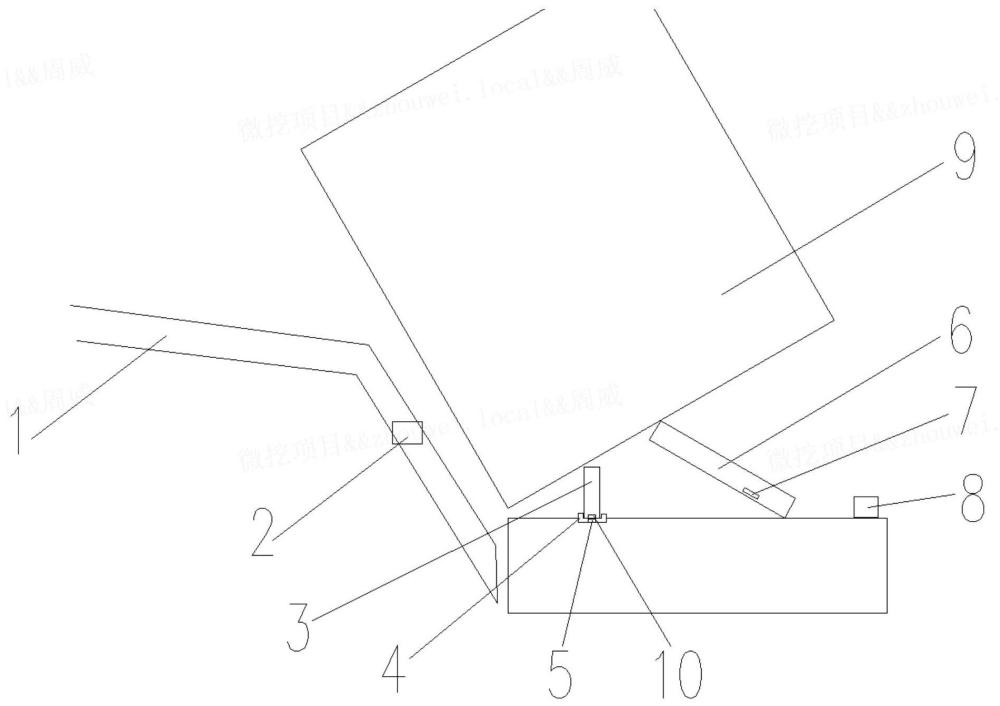
20、安装在驾驶室举升油缸上的距离传感器,用于获取举升油缸伸出长度;
21、安装在动臂上的倾角传感器,用于获取动臂倾角;
22、报警器,用于发出报警信号;
23、控制器,分别与所述距离传感器、倾角传感器和报警器连接,用于执行如第一方面所述的驾驶室翻转安全控制方法,控制报警器进行报警提示。
24、进一步的,若动臂倾角处于预设倾角范围内,控制器控制举升油缸持续伸出,同时获取举升油缸伸出长度处于恒定值的时间;
25、当举升油缸伸出长度处于恒定值的时间小于预设值t时,控制举升油缸继续伸出直至最终位置。
26、进一步的,所述系统还包括:
27、接近开关,包括分装在机械支撑杆末端和支撑杆卡槽上的接近开关a部分与接近开关b部分的开关量;
28、当开关量处于远离状态时,控制器控制报警器发出报警信号;
29、当开关量处于靠近状态时,控制器控制报警器停止发出报警信号。
30、第三方面,本发明提供一种挖掘机,包括如第二方面所述的驾驶室翻转安全控制系统。
31、与现有技术相比,本发明所达到的有益效果:
32、1、本发明能够通过检测动臂状态,对动臂错误姿态进行警示,避免与动臂干涉产生安全事故;
33、2、本发明能够通过举升油缸伸出长度处于恒定值的时间监测驾驶室翻转状态,防止出现报警误触;
34、3、本发明能够通过接近开关监测支撑杆锁死状态,对检修人员进行锁死提示,保证检修人员的安全。
技术特征:
1.一种驾驶室翻转安全控制方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述的驾驶室翻转安全控制方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的驾驶室翻转安全控制方法,其特征在于,所述方法还包括:
4.根据权利要求1所述的驾驶室翻转安全控制方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的驾驶室翻转安全控制方法,其特征在于,所述方法还包括:
6.一种驾驶室翻转安全控制系统,其特征在于,所述系统包括:
7.根据权利要求6所述的驾驶室翻转安全控制系统,其特征在于,若动臂倾角处于预设倾角范围内,控制器控制举升油缸持续伸出,同时获取举升油缸伸出长度处于恒定值的时间;
8.根据权利要求7所述的驾驶室翻转安全控制系统,其特征在于,所述系统还包括:
9.一种挖掘机,其特征在于,包括如权利要求6-8任一项所述的驾驶室翻转安全控制系统。
技术总结
本发明提供一种驾驶室翻转安全控制方法、系统及挖掘机,所述方法包括如下步骤:获取举升油缸伸出长度;获取动臂倾角;若举升油缸伸出长度大于预设置的安全伸出长度,则判断驾驶室已处于翻转状态;当判断驾驶室已处于翻转状态时,判断动臂倾角是否处于预设倾角范围内,若动臂倾角不处于预设倾角范围内,则控制报警器进行报警提示,控制驾驶室取消翻转。本发明一方面在动臂上设有倾角传感器监测动臂姿态,在动臂姿态不正确时及时报警,另一方面在支撑杆与支撑杆卡槽内设置接近开关,在支撑杆未插入卡槽锁死时,对检修人员进行警示。
技术研发人员:周威,刘家林,毕荣康,崔相义,史光程,陈钦法
受保护的技术使用者:徐州徐工挖掘机械有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!