一种智能抓臂清污机及清污控制系统的制作方法
:本发明涉及清污设备,更具体地说是一种智能抓臂清污机及清污控制系统。
背景技术
0、
背景技术:
1、回转式清污机作为一种高效的进水口处理打捞设备,存在一定的自身结构缺陷,当河道污物超过设备的设计处理能力时,会出现主设备故障停机,在设备维修过程中,污物不断阻塞栅体,形成较大压差,设备维修后也无法正常启动,严重时会引发栅体变形。同时齿耙的有限长度,也导致大型的树干不易一次打捞。
2、现有技术中,存在将回转式清污机和抓斗相结合的技术,但都是采用固定位置的悬吊装置进行安装,然后再由人工采取目测的方式判断是否需要抓取污物,再通过人工控制的方式工作,既不能改变抓取的位置,也不能自动化控制,实际效果比较差,在实际工作中的应用也比较少。
技术实现思路
0、
技术实现要素:
1、为解决上述问题,克服现有技术的不足,本发明提供了智能抓臂清污机及清污控制系统。
2、为实现上述目的,本发明提供的一种智能抓臂清污机,包括安装基础,还包括
3、抓臂装置,其用于以抓取方式清理河道里的污物;
4、回转清污装置,其用于以阻拦和抬升方式清理河道里的污物;
5、电控装置,其用于采取手动、遥控和自动方式对抓臂装置进行控制;
6、抓臂装置、回转清污装置和电控装置均设置在安装基础上,电控装置与抓臂装置和回转清污装置电连接。
7、进一步的,抓臂装置包括轨道式抓臂或固定式抓臂机,轨道式抓臂机以可移动的方式设置在安装基础上,固定式抓臂机以固定方式设置在安装基础上。
8、进一步的,轨道式抓臂机包括轨道、移动座、驾驶室和抓臂,轨道固定安装在回转清污装置前方中墩上,移动座以可移动的方式与轨道连接,移动座的上端固定安装驾驶室和抓臂,抓臂的末端安装有快速更换器,快速更换器以可拆卸的方式连接有抓斗。
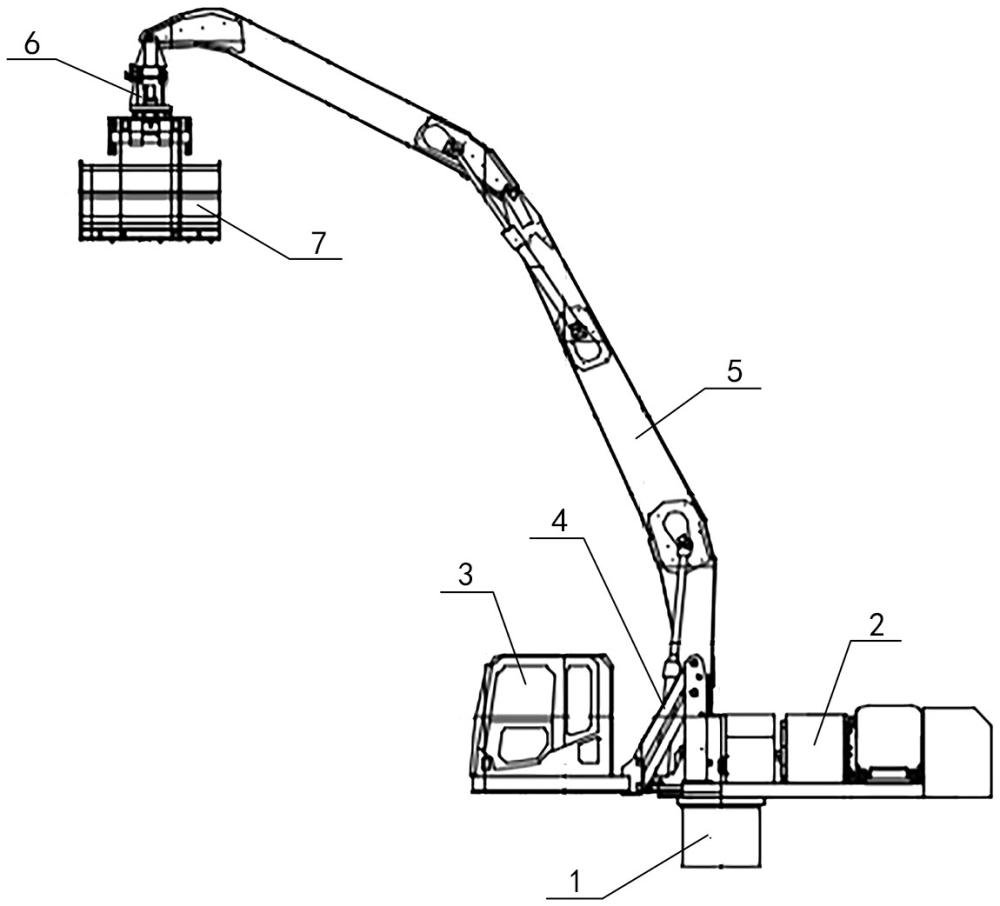
9、进一步的,固定式抓臂机包括固定座、回转驱动、安装板、驾驶室和抓臂,固定座安装在回转清污装置前方中墩上,固定座的上端安装有回转驱动,回转驱动的上端安装有安装板,安装板的上端固定安装驾驶室和抓臂,抓臂的末端安装有快速更换器,快速更换器以可拆卸的方式连接有抓斗。
10、进一步的,抓斗为梅花状抓斗、贝壳状抓斗或多齿状抓斗中的一种。
11、进一步的,电控装置包括手动控制装置、遥控控制装置、智能控制装置和全自动无差别控制装置;
12、手动控制装置包括驾驶室和安装于驾驶室内的液压控制部,液压控制部用于控制驾驶室移动或转向、抓臂动作和抓斗张闭;
13、遥控控制装置包括遥控器、遥控信号接收器、控制部和液压控制部,控制器与遥控信号接收器通过无线方式电连接,遥控信号接收器与控制部电连接,控制部控制液压控制部工作,液压控制部用于控制抓臂装置移动或转向、抓臂动作和抓斗张闭;
14、智能控制装置包括污物识别控制部和抓臂自动化控制部,污物识别控制部与抓臂自动化控制部电连接,抓臂自动化控制部用于控制抓臂装置移动或转向、抓臂动作和抓斗张闭;
15、污物识别控制部包括识别部和处理部,识别部包括水面识别部和水下识别部;
16、全自动无差别控制装置包括定轨定频控制部和抓臂自动化控制部,定轨定频控制部用于根据预设轨道和工作时间间隔频率,向抓臂自动化控制部输出控制信号,抓臂自动化控制部用于控制抓臂装置移动或转向、抓臂动作和抓斗张闭。
17、还包括一种清污控制系统,包括
18、图像识别模块,其通过识别算法对水面漂浮污物的种类、位置和体积信息进行识别;
19、检测识别模块,其通过声呐检测方法对水下污物的形状、密度、体积和位置信息进行识别;
20、种类分析模块,其收集图像识别模块和检测识别模块的识别信息流,并且提取其中与种类相关的数据源进行统计、分析、分类和记录;
21、体积分析模块,其收集图像识别模块和检测识别模块的识别信息流,并且提取其中与体积相关的数据源进行统计、分析和记录,并与种类分析模块中的分类信息进行匹配并记录;
22、数量分析模块,其收集图像识别模块和检测识别模块的识别信息流,并且提取其中与数量相关的数据源进行统计、分析和记录,并与种类分析模块中的分类信息进行匹配并记录;
23、重量分析模块,其收集图像识别模块和检测识别模块的识别信息流,根据种类分析模块中的分类信息和体积分析模块总的体积信息,再与数据库中不同种类污物密度信息进行匹配和计算,得到污物重量数据并进行统计、分析和记录,并与种类分析模块中的分类信息进行匹配并记录;
24、堆积量统计分析模块,其收集图像识别模块和检测识别模块的识别信息流,根据数量分析模块中的数量信息、体积分析模块总的体积信息和重量分析模块中的重量信息,再进行统计和计算,得到污物堆积量数据并进行统计、分析和记录;
25、位置分析模块,其按照预设将水面以双轴坐标系形成划分成区域图谱,然后收集图像识别模块和检测识别模块的识别信息流,并且提取其中与位置相关的数据源,将位置信息转化成坐标位置数据,并在区域图谱上进行标记,并与种类分析模块中的分类信息进行匹配并记录;
26、大数据统计模块,其收集图像识别模块和检测识别模块的识别原始信息流进行记录备份,并收集种类分析模块、体积分析模块、数量分析模块、重量分析模块、堆积量统计分析模块和位置分析模块的分析数据进行统计和进一步分析,得出趋势、规律、周期性变化信息并记录;
27、抓取方式分析模块,其收集大数据统计模块中的趋势、规律、周期性变化信息,以及系统中预先录入的污物季节性变化信息,判断未来预设时间段内水流污物种类、数量、体积和重量的变化趋势,再结合系统中预先录入的关于抓斗种类、规格、最大抓取量的信息,判断未来预设时间段内最合适的抓斗种类,并发出提示;
28、定轨定频运行控制模块,其根据系统中预先录入的运行轨迹、频次的信息,向抓臂自动化控制部输出控制信号,控制抓臂装置移动或转向、抓臂动作和抓斗张闭。
29、清污控制系统还包括手动控制子系统、遥控控制子系统、智能控制子系统和全自动无差别控制子系统。
30、进一步的,智能控制子系统利用种类分析模块、体积分析模块、数量分析模块、重量分析模块、堆积量统计分析模块和位置分析模块的分析数据,向污物识别控制部发出控制信号,控制抓臂装置移动或转向、抓臂动作和抓斗张闭。
31、进一步的,全自动无差别控制子系统利用定轨定频运行控制模块的数据,向抓臂自动化控制部输出控制信号,控制抓臂装置移动或转向、抓臂动作和抓斗张闭。
32、本发明的有益效果是:
33、本发明提供的智能抓臂清污机及清污控制系统能够实现多种控制方式,包括手动控制、遥控控制、智能控制和全自动无差别控制,适应不同工况的使用需求,提高了智能化和自动化水平,极大的提高了清污效率,保护了回转式清污机,也降低了工人的工作强度。
技术特征:
1.一种智能抓臂清污机,包括安装基础,其特征在于:还包括
2.根据权利要求1所述的智能抓臂清污机,其特征在于:所述抓臂装置包括轨道式抓臂或固定式抓臂机,所述轨道式抓臂机以可移动的方式设置在安装基础上,所述固定式抓臂机以固定方式设置在安装基础上。
3.根据权利要求2所述的智能抓臂清污机,其特征在于:所述轨道式抓臂机包括轨道、移动座、驾驶室和抓臂,所述轨道固定安装在回转清污装置前方中墩上,所述移动座以可移动的方式与轨道连接,所述移动座的上端固定安装驾驶室和抓臂,所述抓臂的末端安装有快速更换器,所述快速更换器以可拆卸的方式连接有抓斗。
4.根据权利要求2所述的智能抓臂清污机,其特征在于:所述固定式抓臂机包括固定座、回转驱动、安装板、驾驶室和抓臂,所述固定座安装在回转清污装置前方中墩上,所述固定座的上端安装有回转驱动,所述回转驱动的上端安装有安装板,所述安装板的上端固定安装驾驶室和抓臂,所述抓臂的末端安装有快速更换器,所述快速更换器以可拆卸的方式连接有抓斗。
5.根据权利要求3或4任一项所述的智能抓臂清污机,其特征在于:所述抓斗为梅花状抓斗、贝壳状抓斗或多齿状抓斗中的一种。
6.根据权利要求1所述的智能抓臂清污机,其特征在于:所述电控装置包括手动控制装置、遥控控制装置、智能控制装置和全自动无差别控制装置;
7.一种清污控制系统,其特征在于,应用于上述权利要求1~6任一项所述的智能抓臂清污机,所述清污控制系统包括
8.根据权利要求7所述的清污控制系统,其特征在于:所述智能控制子系统利用种类分析模块、体积分析模块、数量分析模块、重量分析模块、堆积量统计分析模块和位置分析模块的分析数据,向污物识别控制部发出控制信号,控制抓臂装置移动或转向、抓臂动作和抓斗张闭。
9.根据权利要求7所述的清污控制系统,其特征在于:所述全自动无差别控制子系统利用定轨定频运行控制模块的数据,向抓臂自动化控制部输出控制信号,控制抓臂装置移动或转向、抓臂动作和抓斗张闭。
技术总结
一种智能抓臂清污机及清污控制系统,包括安装基础,还包括抓臂装置,其用于以抓取方式清理河道里的污物;回转清污装置,其用于以阻拦和抬升方式清理河道里的污物;电控装置,其用于采取手动、遥控和自动方式对抓臂装置进行控制;抓臂装置、回转清污装置和电控装置均设置在安装基础上,电控装置与抓臂装置和回转清污装置电连接;能够实现多种控制方式,包括手动控制、遥控控制、智能控制和全自动无差别控制,适应不同工况的使用需求,提高了智能化和自动化水平,极大的提高了清污效率,保护了回转式清污机,也降低了工人的工作强度。
技术研发人员:张少卿,翟常伟,王建辉,汤娟娟,朱贺
受保护的技术使用者:曲阜恒威水工机械有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!