自动监测光伏打桩机桩顶位置的方法、装置、设备及介质与流程
本发明属于打桩设备,具体涉及一种自动监测光伏打桩机桩顶位置的方法、装置、设备及介质。
背景技术:
1、光伏打桩机主要用于太阳能光伏电站中的太阳能光伏板支架的安装,通过精确地打桩确保光伏板安装的稳定性和安全性。现有光伏打桩机仅能快速打桩及拔桩,但无法精确定位桩点,并且无法自动测量目标桩高程位置,需要人工测量并需要人工调整同一高度的桩顶标高,从而实现桩的高程对齐,对施工人员技术要求高并且返工率高。同时由于人工测量误差,影响后续光伏板安装的稳定性及安全性。
技术实现思路
1、本发明的目的是提供一种自动监测光伏打桩机桩顶位置的方法、装置、设备及介质,用以解决现有技术中存在的上述问题。
2、为了实现上述目的,本发明采用以下技术方案:
3、本发明还提供了一种自动监测光伏打桩机桩顶位置的方法,其特征在于,包括:
4、通过gnss全球卫星导航系统获取光伏打桩机未打桩前安装支架的第一位置点和第二位置点的坐标信息,以及通过rtk打点获取光伏打桩机未打桩前钻头位置点的坐标信息;
5、建立第一相对坐标系,所述第一相对坐标系的原点为第二位置点所在的位置,x轴正向为第二位置点到第四位置点所在方向,y轴正向为第四位置点到第三位置点所在方向,z轴正向竖直向上,所述第四位置点和第三位置点是基于钻头位置点、第一位置点和第二位置点确定的;
6、基于所建立的第一相对坐标系,解算出各长度信息,所述各长度信息包括第二位置点到第四位置点的长度信息、第四位置点到第三位置点的长度信息和第三位置点到钻头位置点的长度信息,其中,当解算出各长度信息后,记录拉绳传感器的初始值;
7、当光伏打桩机打试验桩且打到目标位置后,基于解算出的钻头测量系的各长度信息以及拉绳传感器所记录出的数值,实时解算出在打到目标位置时钻头位置点的第二坐标信息;
8、当光伏打桩机打桩完成后,通过rtk打点获取试验桩的桩顶坐标;
9、基于所述试验桩的桩顶坐标和钻头位置点的第二坐标信息,利用测量坐标系转换相对坐标系的方法反算出补偿桩顶的位置信息;
10、基于所述各长度信息和补偿桩顶的位置信息实时获取光伏打桩机在打目标桩时钻头的位置信息及目标桩的桩顶位置信息,以实现各目标桩的高程对齐。
11、一些实施例中,通过钻头位置点向第一位置点和第二位置点所在平面做垂线以获取第三位置点的坐标信息,通过第三位置点向第一位置点和第二位置点所构成的线段做垂线以获取第四位置点的坐标信息。
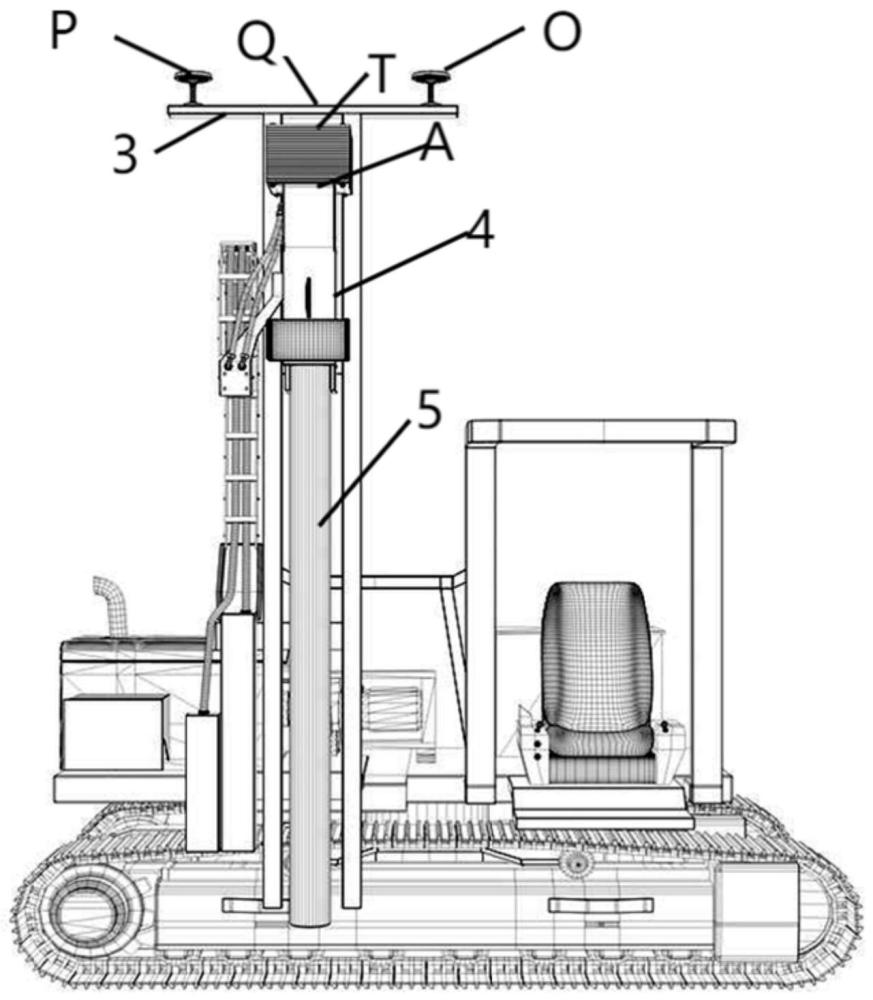
12、一些实施例中,所述gnss全球卫星导航系统包括高精度定位天线和高精度定向天线,其中,所述实现各目标桩的高程对齐,包括:
13、通过所述高精度定向天线和高精度定位天线确定光伏打桩机未打桩前安装支架上第一位置点和第二位置点的北东高坐标和偏航角,以及通过拉绳传感器记录光伏打桩机未打桩前的初始位移值,拉绳传感器记录的光伏打桩机打目标桩后的位移值;
14、基于所述第一位置点和第二位置点的北东高坐标和偏航角,光伏打桩机未打桩前的初始位移值和打目标桩后的位移值,利用测量坐标系转换相对坐标系的计算方法,实时获取目标桩高程信息,以实现各目标桩的高程对齐。
15、一些实施例中,所述高精度定位天线和高精度定向天线设置在光伏打桩机的安装支架上的左右两侧。
16、一些实施例中,所述拉绳传感器的两端,一端固定在光伏打桩机的安装支架任意位置,另一端固定在钻头任意位置。
17、一些实施例中,所述基于所建立的第一相对坐标系,解算出各长度信息,具体为:
18、通过高精度定向天线确定光伏打桩机打未打桩时安装支架上第一位置点的偏航角,通过高精度定位天线确定光伏打桩机未打桩时安装支架上的第二位置点的北东高坐标,以及通过rtk打点获取光伏打桩机未打桩前钻头位置点的坐标信息;
19、建立第一相对坐标系,其中,第一相对坐标系的原点为第二位置点所在的位置,x轴正向为第二位置点到第四位置点所在方向,y轴正向为第四位置点到第三位置点所在方向,z轴正向竖直向上;
20、利用测量坐标系转换相对坐标系计算方法,反算出各长度信息。
21、一些实施例中,所述gnss全球卫星导航系统包括高精度定向天线,其中,所述利用测量坐标系转换相对坐标系的方法反算出补偿桩顶的位置信息,具体为:
22、获取所述钻头位置点的第二坐标信息、试验桩的桩顶坐标和高精度定向天线确定的光伏打桩机打试验桩时安装支架上第二位置点的北东高位置信息及偏航角;
23、利用测量坐标系转换相对坐标系计算方法,反算出补偿桩顶的位置信息。
24、相应的,本发明还公开了一种自动监测光伏打桩机桩顶位置的装置,所述装置包括:
25、坐标信息获取模块,用于通过gnss全球卫星导航系统获取光伏打桩机未打桩前安装支架的第一位置点和第二位置点的坐标信息,以及通过rtk打点获取光伏打桩机未打桩前钻头位置点的坐标信息;
26、建立模块,用于建立第一相对坐标系,所述第一相对坐标系的原点为第二位置点所在的位置,x轴正向为第二位置点到第四位置点所在方向,y轴正向为第四位置点到第三位置点所在方向,z轴正向竖直向上;
27、第一解算模块,用于基于所建立的第一相对坐标系,解算出各长度信息,所述各长度信息包括第二位置点到第四位置点的长度信息、第四位置点到第三位置点的长度信息和第三位置点到钻头位置点的长度信息,其中,当解算出各长度信息后,记录拉绳传感器的初始值;
28、第二解算模块,用于当光伏打桩机打试验桩且打到目标位置后,基于解算出的钻头测量系的各长度信息以及拉绳传感器所记录出的数值,实时解算出在打到目标位置时钻头位置点的第二坐标信息;
29、第一获取模块,用于当光伏打桩机打桩完成后,通过rtk打点获取试验桩的桩顶坐标;
30、第二获取模块,用于基于所述试验桩的桩顶坐标和钻头位置点的第二坐标信息,利用测量坐标系转换相对坐标系的方法反算出补偿桩顶的位置信息;
31、桩顶位置信息获取模块,用于基于所述各长度信息、第二坐标信息和补偿桩顶的位置信息实时获取光伏打桩机在打目标桩时钻头的位置信息及目标桩的桩顶位置信息,以实现各目标桩的高程对齐。
32、一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如所述方法的步骤。
33、一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述方法的步骤。
34、有益效果:
35、本申请的自动监测光伏打桩机桩顶位置的方法主要运用于数字化施工行业,涉及光伏打桩机的引导,通过自动记录目标桩高程位置,实现高程对齐,从而降低劳工成本,提高施工作业的精度和效率。
技术特征:
1.一种自动监测光伏打桩机桩顶位置的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,通过钻头位置点向第一位置点和第二位置点所在平面做垂线以获取第三位置点的坐标信息,通过第三位置点向第一位置点和第二位置点所构成的线段做垂线以获取第四位置点的坐标信息。
3.根据权利要求1所述的方法,其特征在于,所述gnss全球卫星导航系统包括高精度定位天线和高精度定向天线,其中,所述实现各目标桩的高程对齐,包括:
4.根据权利要求3所述的方法,其特征在于,所述高精度定位天线和高精度定向天线设置在光伏打桩机的安装支架上的左右两侧。
5.根据权利要求1所述的方法,其特征在于,所述拉绳传感器的一端固定在光伏打桩机的安装支架任意位置,另一端固定在钻头任意位置。
6.根据权利要求3所述的方法,其特征在于,所述基于所建立的第一相对坐标系,解算出各长度信息,具体为:
7.根据权利要求1所述的方法,其特征在于,所述gnss全球卫星导航系统包括高精度定向天线,其中,所述利用测量坐标系转换相对坐标系的方法反算出补偿桩顶的位置信息,具体为:
8.一种自动监测光伏打桩机桩顶位置的装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中的任一项所述的方法的步骤。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中的任一项所述的方法的步骤。
技术总结
本发明公开了一种自动监测光伏打桩机桩顶位置的方法,包括:获取未打桩前安装支架第一位置点和第二位置点的坐标信息、未打桩前钻头位置点的坐标信息,解算出钻头测量系的各长度信息;当打试验桩且打到目标位置后,基于解算出的钻头测量系的各长度信息以及拉绳传感器所记录出的数值,解算出在打到目标位置时钻头位置点的第二坐标信息;当打桩完成后,获取试验桩的桩顶坐标;基于桩顶坐标反算出补偿桩顶的位置信息;基于车辆尺寸的反解算法实时获取目标桩桩顶位置信息,以实现各目标桩的高程对齐。本申请通过自动记录目标桩高程位置,实现高程对齐,从而降低劳工成本,提高施工作业效率。
技术研发人员:吴增巍,朱庆娜,鲁雷
受保护的技术使用者:北京合众鼎新信息技术有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!