基于BIM的截桩机智能引导定位系统的制作方法
本发明涉及一种基于bim的截桩机智能引导定位系统。
背景技术:
1、截桩机是一种适合桩基工程中快速截除桩头的工程机械。适用于多种桩基形式桩头的截除。截桩机通过动力源给截桩机多个油缸提供压力,油缸直接驱动钎杆,同时挤压桩身,使桩头截除。目前市面上简单的液压截桩装置,它的应用过程中需要大吨位(≥20t)吊机配合拔出桩头,且该装置无法保持水平,定位不准确,导致桩头截断断面倾斜,仍需要人工操作工具进一步处理,存在人机投入成本高、施工安全风险大、机械化水平低等诸多缺点。
技术实现思路
1、本发明的目的在于提供一种基于bim的截桩机智能引导定位系统。
2、为解决上述问题,本发明提供一种基于bim的截桩机智能引导定位系统,包括:
3、设置于截桩机的环盘式液压截桩系统的环形截桩头上的定位装置,用于实时采集环形截桩头的位置信息;
4、设置于截桩机的驾驶监控室内的引导定位器,用于从定位装置接收环形截桩头的位置信息,并基于环形截桩头的位置信息、截桩机bim模型和桩头的bim模型,将环形截桩头的位置与桩头的预设位置进行对准。
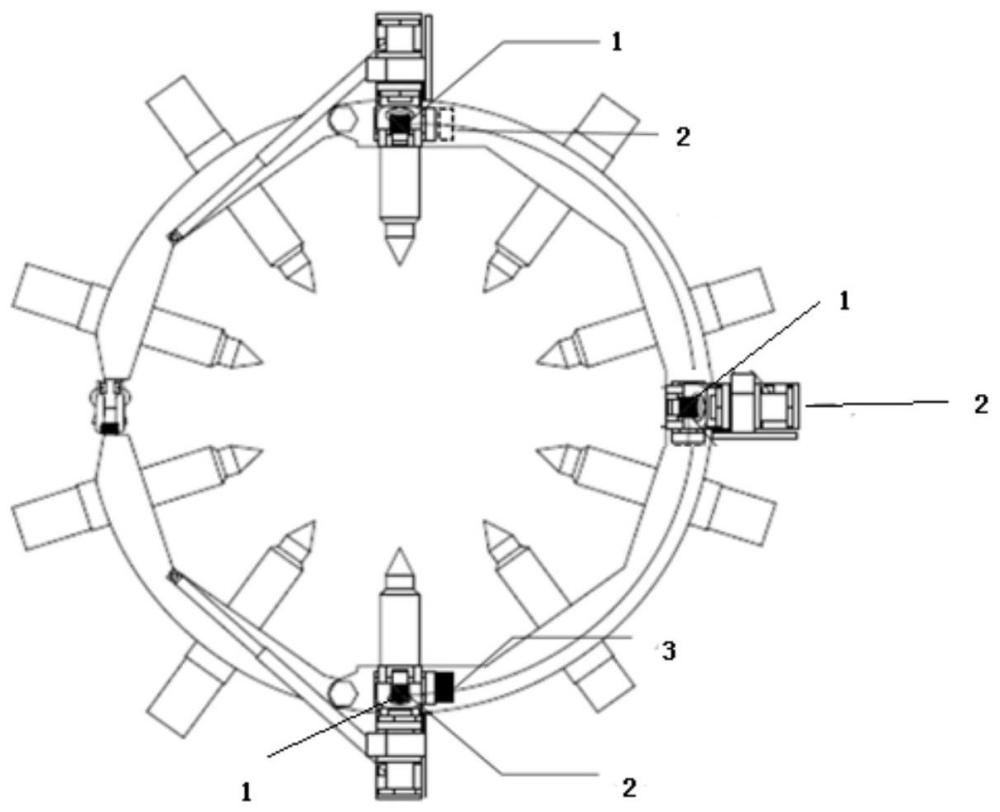
5、进一步的,在上述系统中,所述定位装置包括:设置于环形截桩头上的定位芯片、影像测量仪和定位数据传输装置,所述定位数据传输装置分别与定位芯片、影像测量仪和引导定位器连接。
6、进一步的,在上述系统中,所述引导定位器,包括:触控屏幕、无线传输装置、定位数据接收装置和数据处理芯片,其中,所述数据处理芯片分别与触控屏幕、无线传输装置、定位数据接收装置连接;所述定位数据接收装置与所述定位数据传输装置通信,定位数据接收装置从所述定位数据传输装置接收环形截桩头的位置信息。
7、进一步的,在上述系统中,所述无线传输装置,用于获取现场的桩位bim模型及截桩机bim模型导入引导定位器;
8、所述数据处理芯片,用于读取桩位bim模型及截桩机bim模型,并基于桩位bim模型及截桩机bim模型,数据处理芯片计算截桩机的移动引导路线及桩头的预设位置并在显示屏上显示;待截桩机根据所述移动引导路线移动到桩头的预设位置附近时,基于环形截桩头的位置信息,将环形截桩头的位置与桩头的预设位置进行对准。
9、进一步的,在上述系统中,所述定位芯片用于采集环形截桩头的位置信息中的平面坐标,所述影像测量仪用于采集位置信息中的环形截桩头的高度坐标。
10、进一步的,在上述系统中,所述影像测量仪的数量为三个,相对布置于环形截桩头上,三个影像测量仪间隔90度布置。
11、进一步的,在上述系统中,述定位芯片的数量为3个,其中,每个定位芯片分别设置于对应一个影像测量仪所的位置的环形截桩头上。
12、进一步的,在上述系统中,已知的桩头的预设位置的坐标为(x,y,z);
13、第一个定位芯片的坐标为a(x,y1,z1),第一个定位芯片前部的截桩端对应坐标为a(x.y2,z);其中,a(x,y1,z1)的x,y1由第一个定位芯片采集得到,a(x,y1,z1)的z1由第一个定位芯片位置处的影像测量仪采集得到;
14、第二个定位芯片的坐标为b(x,y4,z1),第二个定位芯片前部的截桩端对应坐标为b(x.y3,z);其中,b(x,y4,z1)的x,y4由第二个定位芯片采集得到,b(x,y4,z1)的z1由第二个定位芯片位置处的影像测量仪采集得到;
15、第三个定位芯片的坐标为c(x1,y,z1),其中,c(x1,y,z1)的x1,y由第三个定位芯片采集得到,c(x1,y,z1)的z1由第三个定位芯片位置处的影像测量仪采集得到。
16、进一步的,在上述系统中,所述数据处理芯片,用于若平面位置:x+r=x1、y+r=y1;且高度位置:z=z1,则表示环形截桩头的位置与桩头的预设位置已经对准。
17、进一步的,在上述系统中,所述数据处理芯片,还用于基于桩位bim模型中的桩身强度的参数值,对截桩机施加的压力值进行评估,以得到评估压力值,基于所述评估压力值控制截桩机进行工作。
18、与现有技术相比,本发明通过定位装置,完成了截桩机的现场精确定位。本发明通过将截桩机bim模型和桩头的bim模型引导定位器,完成了混凝土灌注桩的几何及非几何数据的输入。本发明通过引导定位器,实现了混凝土灌注桩实际定位数据及截桩机bim数据的集成、分析、引导定位。本发明实现了截桩机的智能引导定位,对提高施工质量、实现数字化、智能化施工及管理等具有重要意义。
19、本发明通过本发明通过桩头的bim模型附带的施工参数值,系统智能分析评估截桩机工作时需要施加的压力,为截桩机施工提供更有力的数据支撑。
20、本发明将混凝土灌注桩设计bim模型与混凝土灌注桩的实际定位数据结合起来,在截桩前利用引导定位器辅助施工人员对桩位进行引导路线的空间定位,进而通过定位装置对截桩机进行水平位移纠偏同时,在系统中利用bim模型中所含有的工程数值,如该桩身强度等对截桩机需要施加的压力值进行评估,进而实现桩头水平截断,从而保障截桩质量,减少人工投入,降低施工安全风险,同时提高数字化智能化施工水平。
技术特征:
1.一种基于bim的截桩机智能引导定位系统,其特征在于,包括:
2.如权利要求1所述的基于bim的截桩机智能引导定位系统,其特征在于,所述定位装置包括:设置于环形截桩头上的定位芯片、影像测量仪和定位数据传输装置,所述定位数据传输装置分别与定位芯片、影像测量仪和引导定位器连接。
3.如权利要求1所述的基于bim的截桩机智能引导定位系统,其特征在于,所述引导定位器,包括:触控屏幕、无线传输装置、定位数据接收装置和数据处理芯片,其中,所述数据处理芯片分别与触控屏幕、无线传输装置、定位数据接收装置连接;所述定位数据接收装置与所述定位数据传输装置通信,定位数据接收装置从所述定位数据传输装置接收环形截桩头的位置信息。
4.如权利要求1所述的基于bim的截桩机智能引导定位系统,其特征在于,所述无线传输装置,用于获取现场的桩位bim模型及截桩机bim模型导入引导定位器;
5.如权利要求1所述的基于bim的截桩机智能引导定位系统,其特征在于,所述定位芯片用于采集环形截桩头的位置信息中的平面坐标,所述影像测量仪用于采集位置信息中的环形截桩头的高度坐标。
6.如权利要求1所述的基于bim的截桩机智能引导定位系统,其特征在于,所述影像测量仪的数量为三个,相对布置于环形截桩头上,三个影像测量仪间隔90度布置。
7.如权利要求6所述的基于bim的截桩机智能引导定位系统,其特征在于,述定位芯片的数量为3个,其中,每个定位芯片分别设置于对应一个影像测量仪所的位置的环形截桩头上。
8.如权利要求7所述的基于bim的截桩机智能引导定位系统,其特征在于,已知的桩头的预设位置的坐标为(x,y,z);
9.如权利要求8所述的基于bim的截桩机智能引导定位系统,其特征在于,所述数据处理芯片,用于若平面位置:x+r=x1、y+r=y1;且高度位置:z=z1,则表示环形截桩头的位置与桩头的预设位置已经对准。
10.如权利要求1所述的基于bim的截桩机智能引导定位系统,其特征在于,所述数据处理芯片,还用于基于桩位bim模型中的桩身强度的参数值,对截桩机施加的压力值进行评估,以得到评估压力值,基于所述评估压力值控制截桩机进行工作。
技术总结
本发明提供了一种基于BIM的截桩机智能引导定位系统,将混凝土灌注桩设计BIM模型与混凝土灌注桩的实际定位数据结合起来,在截桩前利用引导定位器辅助施工人员对桩位进行引导路线的空间定位,进而通过定位装置对截桩机进行水平位移纠偏同时,在系统中利用BIM模型中所含有的工程数值,如该桩身强度等对截桩机需要施加的压力值进行评估,进而实现桩头水平截断,从而保障截桩质量,减少人工投入,降低施工安全风险,同时提高数字化智能化施工水平。
技术研发人员:陈燕,陈禹,李佳伟,陈峰军
受保护的技术使用者:上海建工集团股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!