一种无人驾驶挖掘机挖掘装置的制作方法
本申请涉及挖掘装置,更具体地,涉及一种无人驾驶挖掘机挖掘装置。
背景技术:
1、随着社会的不断发展,一些在特殊场合需要用到无人驾驶的挖掘机,现有无人驾驶的挖掘机由电气系统、发动机系统、行走系统、液压系统、操纵系统等构成的一个有机整体,其中挖掘机挖掘装置(挖斗)属结构件类产品,由齿座板、底板、边板、墙板、挂耳板、背板、斗耳板、斗耳套、斗齿、齿座、护板或斗角等零配件组成,所以焊接是该装置最关键的制作工序,焊接质量直接影响到挖掘装置的结构强度及使用寿命。
2、现有技术中遥控无人驾驶的挖掘机时,挖掘机内部无操作人员,平常操作人员可以根据自身感觉判断行驶状态,而无人驾驶的挖掘机则无法判断挖掘机的行驶状态;并且由于挖掘装置多通过焊接工序组合焊接而成,使其实际使用结构和功能部件无法便捷进行维护更换,使挖掘装置意外出现破损时必须进行整体的更换,进而造成较多不必要的经济损失,同时较为费时费力。因此,本领域技术人员提供了一种无人驾驶挖掘机挖掘装置,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种无人驾驶挖掘机挖掘装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
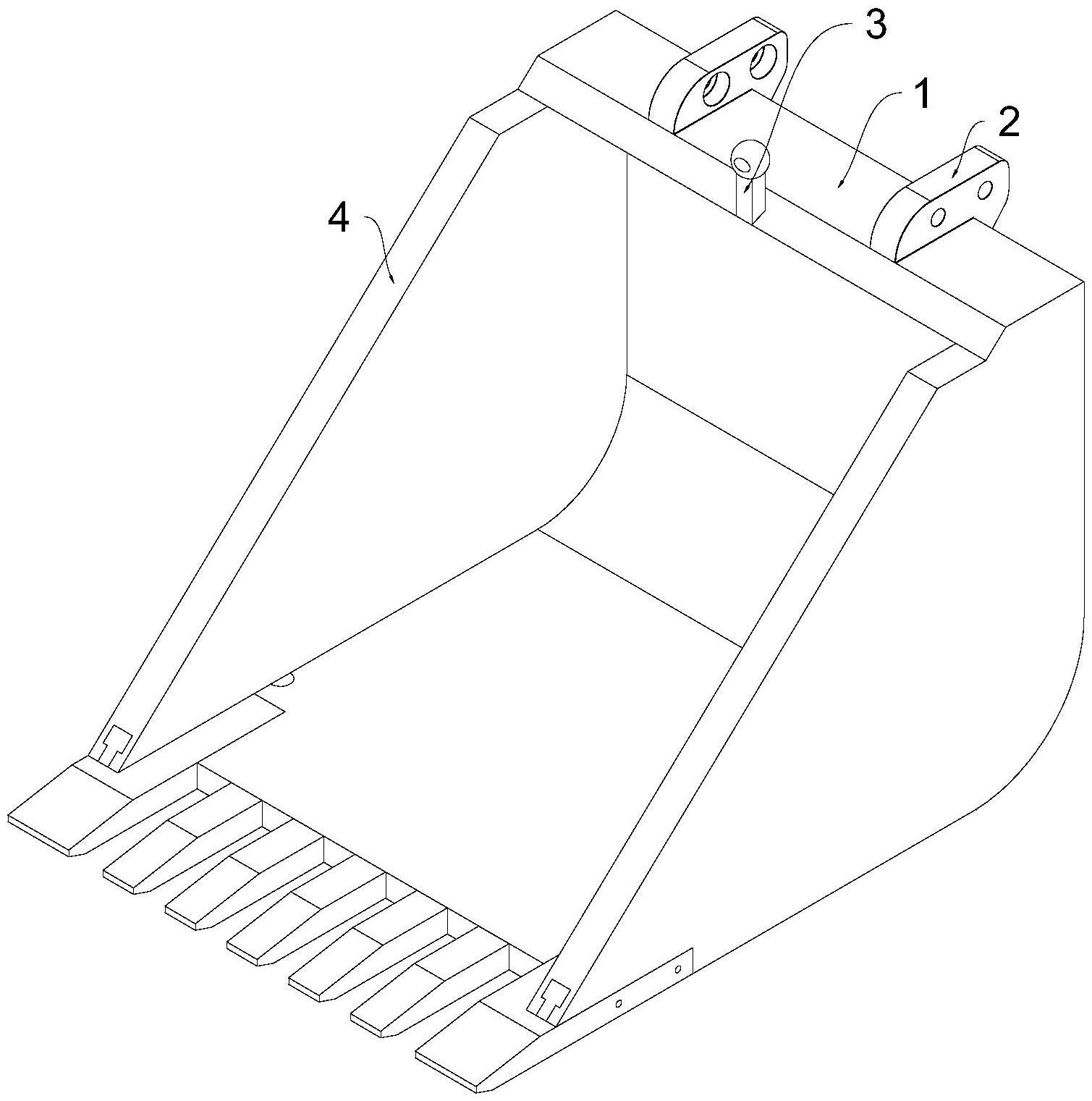
3、第一方面,本申请提供了一种无人驾驶挖掘机挖掘装置,包括铲斗本体、摄像头,所述铲斗本体两侧安装有侧板,所述铲斗本体下侧一端开设有插槽一,插槽一内横向开设有通孔,所述插槽一内插接有斗齿一,所述通孔内贯穿有固定杆,所述侧板底端开设有卡槽,所述侧板下侧设置有斗齿二,所述斗齿二内开设有定位槽,所述定位槽一侧连通有通槽,所述定位槽直径大于通槽。
4、第二方面,本申请提供了一种无人驾驶挖掘机挖掘装置,所述固定杆内滑动卡接有定位杆,两个所述定位杆之间设置有抵压弹簧,所述抵压弹簧与定位杆抵压接触,所述定位杆与定位槽滑动插接。
5、第三方面,本申请提供了一种无人驾驶挖掘机挖掘装置,所述固定杆横向贯穿斗齿一,所述斗齿一通过固定杆与铲斗本体进行连接,将固定杆从通孔内拔出,斗齿一得以进行拆卸。
6、第四方面,本申请提供了一种无人驾驶挖掘机挖掘装置,所述斗齿二一端安装有插块,所述铲斗本体底端一侧开设有插槽二,所述插槽二内开设有螺纹孔,所述螺纹孔内螺纹连接有螺栓,插块通过螺栓与插槽二固定连接,所述斗齿二上部设置有卡块,所述卡块与卡槽滑动卡接。
7、第五方面,本申请提供了一种无人驾驶挖掘机挖掘装置,所述铲斗本体上安装有连接件,所述摄像头设置与连接件前侧,所述摄像头与铲斗本体之间通过水平机构连接,因此,在挖掘机行驶过程中,摄像头因水平机构保持水平状态,当摄像头看向挖掘机本体时,挖掘机行驶过程若是出现因地面不平整造成挖掘机本体的侧歪,可及时观测到并进行遥控调整。
8、本申请提供的一种无人驾驶挖掘机挖掘装置,具备以下有益效果:
9、通过设计,铲斗本体上安装有摄像头,该摄像头通过水平机构进行连接,因此,在挖掘机行驶过程中,摄像头因水平机构保持水平状态,当摄像头看向挖掘机本体时,挖掘机行驶过程若是出现因地面不平整造成挖掘机本体的侧歪,可及时观测到并进行遥控调整;当斗齿一或斗齿二出现损坏或磨损需要更换时,将螺栓拧出,随后找一根可以插入通槽的杆状物,对定位槽内的定位杆进行抵压,使得定位杆脱离对斗齿二的卡接,此时,斗齿二得以进行拆除,当斗齿二拆卸下后,将固定杆从通孔内拔出,斗齿一得以进行拆卸,该结构内,螺栓介入量少,拆卸过程简单快捷。
技术特征:
1.一种无人驾驶挖掘机挖掘装置,包括铲斗本体(1)、摄像头(3),其特征在于,所述铲斗本体(1)两侧安装有侧板(4),所述铲斗本体(1)下侧一端开设有插槽一(5),插槽一(5)内横向开设有通孔(6),所述插槽一(5)内插接有斗齿一(10),所述通孔(6)内贯穿有固定杆(11),所述侧板(4)底端开设有卡槽(9),所述侧板(4)下侧设置有斗齿二(14),所述斗齿二(14)内开设有定位槽(17),所述定位槽(17)一侧连通有通槽(18),所述定位槽(17)直径大于通槽(18)。
2.根据权利要求1所述的一种无人驾驶挖掘机挖掘装置,其特征在于,所述固定杆(11)内滑动卡接有定位杆(13),两个所述定位杆(13)之间设置有抵压弹簧(12),所述抵压弹簧(12)与定位杆(13)抵压接触,所述定位杆(13)与定位槽(17)滑动插接。
3.根据权利要求1所述的一种无人驾驶挖掘机挖掘装置,其特征在于,所述固定杆(11)横向贯穿斗齿一(10),所述斗齿一(10)通过固定杆(11)与铲斗本体(1)进行连接。
4.根据权利要求1所述的一种无人驾驶挖掘机挖掘装置,其特征在于,所述斗齿二(14)一端安装有插块(15),所述铲斗本体(1)底端一侧开设有插槽二(7),所述插槽二(7)内开设有螺纹孔(8),所述螺纹孔(8)内螺纹连接有螺栓,插块(15)通过螺栓与插槽二(7)固定连接,所述斗齿二(14)上部设置有卡块(16),所述卡块(16)与卡槽(9)滑动卡接。
5.根据权利要求1所述的一种无人驾驶挖掘机挖掘装置,其特征在于,所述铲斗本体(1)上安装有连接件(2),所述摄像头(3)设置与连接件(2)前侧,所述摄像头(3)与铲斗本体(1)之间通过水平机构连接。
技术总结
本申请实施例公开了一种无人驾驶挖掘机挖掘装置,包括铲斗本体、摄像头,所述铲斗本体两侧安装有侧板,所述铲斗本体下侧一端开设有插槽一,插槽一内横向开设有通孔,所述插槽一内插接有斗齿一,所述通孔内贯穿有固定杆。在铲斗本体上安装有摄像头,该摄像头通过水平机构进行连接,摄像头用于看向挖掘机本体,对挖掘机进行观测并进行遥控调整;当斗齿一或斗齿二出现损坏或磨损需要更换时,将螺栓拧出,随后找一根可以插入通槽的杆状物,对定位槽内的定位杆进行抵压,使得定位杆脱离对斗齿二的卡接,此时,斗齿二得以进行拆除,当斗齿二拆卸下后,将固定杆从通孔内拔出,斗齿一得以进行拆卸,该结构内,螺栓介入量少,拆卸过程简单快捷。
技术研发人员:曲成华,冀有为,周玉宝,孙涛,孟庆宇,胡鹏飞,易勇伟,白羽翔,纪鹏翔,王玉龙
受保护的技术使用者:华能伊敏煤电有限责任公司
技术研发日:20230601
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!