一种全解耦型纯电动挖掘机驱动系统的制作方法
本技术涉及工程机械车辆,具体涉及一种全解耦型纯电动挖掘机驱动系统。
背景技术:
1、轮式挖掘机属于常用的工程机械,广泛应用于工程建设,如公路、桥梁、地下工程等各类施工场所。挖掘机按驱动功能主要可分为三个系统:上车回转系统、工作系统、行走驱动系统。目前纯电动挖掘机三个系统动力源往往耦合在一起,现有结构中有如下几种方案:方案一,通过一个电机连接分动箱带动两个液压泵,部分动力通过一个液压泵带动液压马达,经变速器、分动箱,将动力传递给前后桥;部分动力通过另一个液压泵将动力传递给铲斗等工作机构;上车回转系统使用单独电机驱动。方案二,上车回转系统、工作系统、行走驱动系统均通过同一个电机提供动力,三个系统动力完全耦合在一起。
2、其缺点在于:
3、挖掘机工作中存在多个复合动作,存在多系统同时运行以及分开单独运行的情况。如按多系统同时工作匹配满足需求的动力系统,则在分系统单独运行时,会存在动力系统能力过剩,即所谓“大马拉小车”的情况,使电驱系统运行效率偏低,整体工作效率低。且多系统耦合,液压系统管路复杂,如果出现液压故障,排查比较困难。同时现有电动挖掘机驱动系统结构,由于行走驱动时,前后桥属于刚性连接,车辆在挖掘时或移动转场时,在工作过程尤其转弯过程中,存在车轮线速度不同导致前轮或后轮产生滑移,存在寄生功率的问题,造成了能耗利用率下降,且由于存在轮胎滑移的情况,会导致轮胎异常磨损,两者均提高了整车使用及维护成本。
技术实现思路
1、为了解决上述问题,本实用新型提供了一种全解耦型纯电动挖掘机驱动系统,其中将上车回转系统采用回转电机结合减速器带动回转机构,实现上车对下车的回转;工作系统保留液压管路,通过执行机构电机带动液压泵将动力传递给各执行机构;行走驱动系统采用前后桥分布式驱动构型。
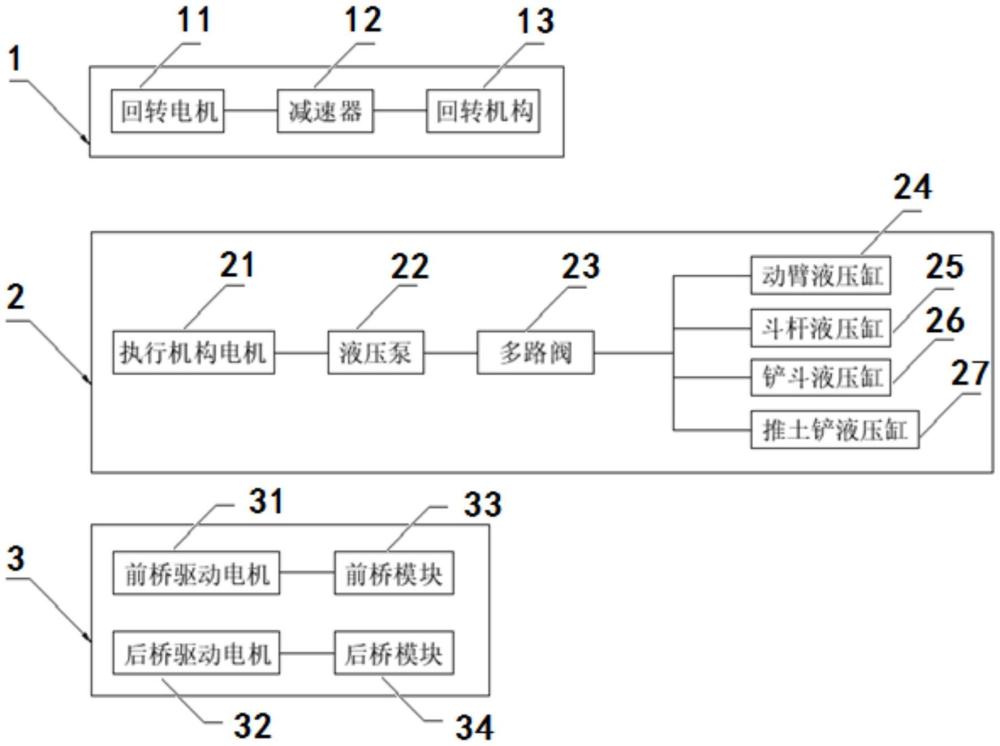
2、方案具体如下:一种全解耦型纯电动挖掘机驱动系统,包括上车回转系统、工作系统、行走驱动系统;
3、所述上车回转系统包括有:回转电机、减速器、回转机构;所述回转电机驱动连接减速器,所述减速器驱动连接回转机构;
4、所述工作系统包括有:执行机构电机、液压泵、多路阀以及执行元件;所述执行机构电机驱动连接液压泵,所述液压泵向各执行元件供油;
5、所述行走驱动系统包括有:前桥驱动电机、后桥驱动电机;所述前桥驱动电机驱动连接前桥模块,所述后桥驱动电机驱动连接后桥模块。
6、进一步地:所述执行元件包括有:动臂液压缸、斗杆液压缸、铲斗液压缸、推土铲液压缸。
7、进一步地:所述前桥驱动电机和后桥驱动电机分别对应安装于前桥主减速器壳体和后桥主减速器壳体上,其中,电机与前后轴采用平行轴布置,电机端盖法兰盘与车桥主减速器壳体通过螺栓连接,电机输出轴与主减速器输入轴通过花键配合连接。
8、进一步地:所述前桥模块、后桥模块都包括有主减速器、轮边减速器、中央差速器,所述主减速器通过中央差速器将动力分配到轮边减速器。
9、进一步地:所述前桥驱动电机采用开关磁阻电机或交流异步电机;所述后桥驱动电机采用永磁同步电机。
10、进一步地:所述前桥模块、后桥模块减速比完全相同。
11、本实用新型将三个驱动系统从结构上进行全解耦,具有如下优点:
12、第一,简化了液压管路,仅工作系统需要使用液压管路,从而使管路在布置上进行了优化,降低液压系统固有的缺陷,如容积率低、能耗大、故障难以排查等问题。
13、第二,三个系统使用单独的动力系统,功能上使三个系统互相不影响,避免出现因为功率限制导致流量不足,执行动作不能兼顾的问题;或是动力匹配过剩造成运行效率低的问题,提高了工作效率。
14、第三,采用分布式前后桥独立驱动,分开控制,使得挖掘机在未附加其他传感器的情况下,能够准确识别相应工况,并对力矩进行精确的分配,可以消除转速差导致的寄生功率,从而降低能耗提高效率。
15、第四,电机直接布置于前后桥上,取消传动轴,简化了传动链,提高了传动效率。
技术特征:
1.一种全解耦型纯电动挖掘机驱动系统,其特征在于:包括上车回转系统、工作系统、行走驱动系统;
2.根据权利要求1所述的全解耦型纯电动挖掘机驱动系统,其特征在于:
3.根据权利要求1所述的全解耦型纯电动挖掘机驱动系统,其特征在于:
4.根据权利要求1所述的全解耦型纯电动挖掘机驱动系统,其特征在于:
5.根据权利要求1或3所述的全解耦型纯电动挖掘机驱动系统,其特征在于:
6.根据权利要求1或4所述的全解耦型纯电动挖掘机驱动系统,其特征在于:
技术总结
本发明公开一种全解耦型纯电动挖掘机驱动系统,包括上车回转系统、工作系统、行走驱动系统;上车回转系统包括有回转电机、减速器、回转机构,回转电机驱动连接减速器,减速器驱动连接回转机构;工作系统包括有执行机构电机、液压泵、多路阀以及执行元件,执行机构电机驱动连接液压泵,液压泵向各执行元件供油;行走驱动系统包括有前桥驱动电机、后桥驱动电机,前、后桥驱动电机分别驱动连接前、后桥模块。本技术三个驱动系统从结构上完全解耦,各自独立,功能上使三个系统互相不影响,避免出现因为功率限制导致流量不足,执行动作不能兼顾的问题,或是动力匹配过剩造成运行效率低的问题。
技术研发人员:曹浦,赵毅,陈立平,李莉
受保护的技术使用者:江苏智能无人装备产业创新中心有限公司
技术研发日:20230824
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!