一种高承载力地基施工方法与流程
本发明涉及工程机械,具体涉及一种高承载力地基施工方法。
背景技术:
1、地基是建筑物的基础,对建筑物的承载力和稳定性具有重要影响。地基处理施工方法是一种通过改善地基条件来增理建筑基础的承载力和稳定性的方法。强夯法是常用的地基处理施工方法之一,其主要工作原理是利用大型履带式强夯机将8-30吨的重锤从6-30米高度自由落下,对土进行强力夯实,迅速提高地基的承载力及压缩模量,形成比较均匀的、密实的地基,在地基一定深度内改变了地基土的孔隙分布,具有工期短、效果好、造价低等优点。
2、授权公告号cn106480873b的中国专利公开了一种强夯机自动控制系统和方法,其中记载了关于强夯机自动控制系统的轨迹规划的方式,但该专利并没有对强夯机的行进路径进行规划,使得强夯机每次移动后都需要重新固定,频繁的启停移动不仅不便于操作,还降低了施工效率。
技术实现思路
1、本发明提供一种高承载力地基施工方法,以解决现有的强夯机在使用时,由于没有对强夯机的行进路径进行规划,使得强夯机每次移动后都需要重新固定,频繁的启停移动不仅不便于操作,还降低了施工效率的问题。
2、本发明的一种高承载力地基施工方法采用如下技术方案:一种高承载力地基施工方法,包括以下步骤:s100,获取强夯的夯点布置形式、强夯机的尺寸和强夯机的工作区间(a,b),其中,a为强夯机摆动最小的摆动距离,b为强夯机摆动最大的摆动距离;
3、s200,根据强夯的夯点布置形式,匹配强夯机需要行走的次数n;
4、s300,根据强夯机的工作区间(a,b),判断强夯机第n次行走时的夯点模式p,n≥1,n为正整数;p≤4,p为正整数;
5、在s300中,夯点模式分为:夯点模式四、夯点模式三、夯点模式二和夯点模式一,并从夯点模式四开始判断,依次递减;
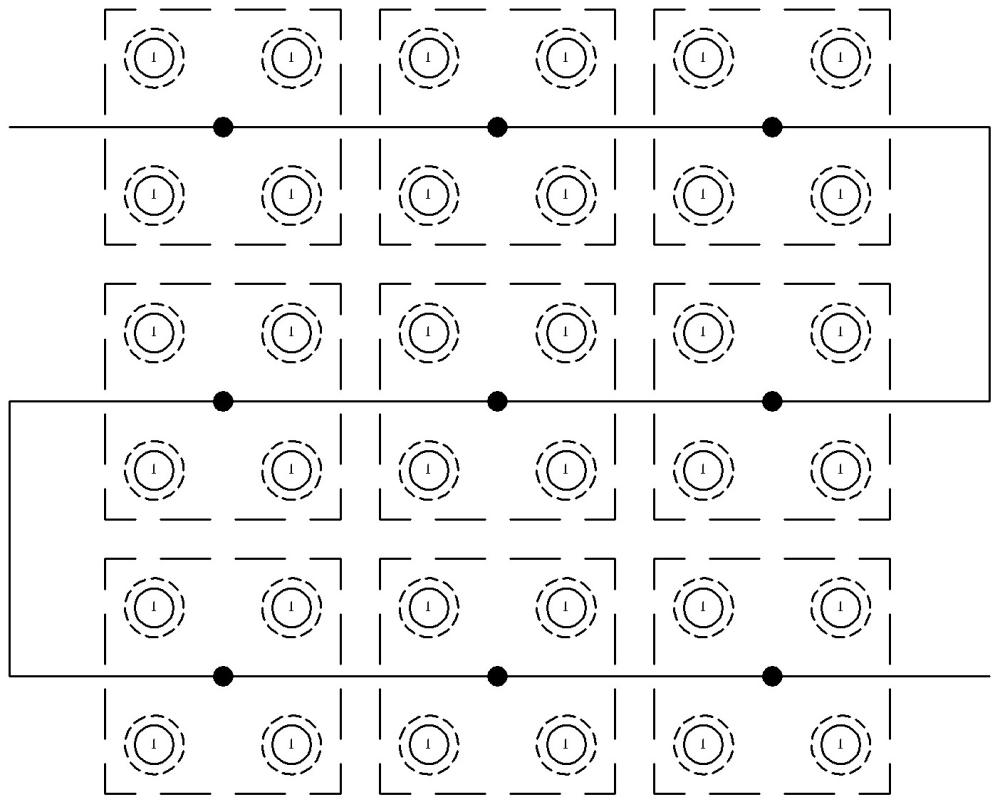
6、s400,根据强夯机第n次行走时的夯点模式p和强夯机的尺寸,匹配第n次行走时的夯点模式p下对应的行走路径q;
7、s500,若强夯机能够按照第n次行走时的夯点模式p下对应的行走路径q行走,则强夯机进入准备状态;若强夯机不能按照第n次行走时的夯点模式p下对应的行走路径q行走,则重新匹配夯点模式r,且r=p-1,r≤3,r为正整数。
8、进一步地,在s500后,还包括以下步骤:
9、s600,清理并平整施工场地,强夯机就位,夯锤置于第n次行走时的夯点位置,测量夯前锤顶高程,将夯锤起吊到预定高度,开启脱钩装置,待夯锤脱钩自由下落后,放下吊钩,测量锤顶高程;
10、s700,重复s600,按照规定的夯击次数及控制标准完成一个夯点的夯实;
11、s800,按照s500中匹配的,第n次行走时的夯点模式p下对应的行走路径q行走,并重复s600-s700,至完成该行走路径下所有夯点的强夯;
12、s900,用推土机将夯坑填平,并测量场地高程;
13、s1000,重复s300-s900,逐个完成强夯机需要行走的次数。
14、进一步地,在s200中,当强夯的夯点布置形式为正方形时,强夯机需要工作的次数为3次。
15、进一步地,在s200中,按照强夯机需要行走的次数对每遍强夯的夯点进行标记。
16、进一步地,在s200中,还包括:获取夯点的坐标信息。
17、进一步地,在s300中,将强夯机第n次行走时,相邻两个夯点的中心之间的间距设为l1,四个夯点中,以相邻两个夯点的中心之间的间距l1为边长,构建一个四边形,先判断是否满足夯点模式四,若满足夯点模式四,则强夯机单次启停允许强夯的夯点数量为4点;其中,满足夯点模式四的条件为:强夯机的摆动中心点o,处于四边形上两条对角线的交点上,且两条对角线形成的角为90°,且;l3为以相邻两个夯点的中心之间的间距l1为边长,构建形成的四边形的对角线的一半;
18、若不满足夯点模式四时,判断是否满足夯点模式三,若满足夯点模式三,则强夯机单次启停允许强夯的夯点数量为三点;其中,满足夯点模式三的条件为:强夯机的摆动中心点o处于四边形上两条对角线的交点上,且两条对角线形成的角为90°,且;
19、若既不满足夯点模式四,又不满足夯点模式三时,判断是否满足夯点模式二,若满足夯点模式二,则强夯机单次启停允许强夯的夯点数量为2点;其中,满足夯点模式二的条件为:强夯机的摆动中心点o在纵向方向上,处于纵向方向上相邻的两个夯坑的中点,并使强夯机靠近待强夯点一侧的侧边在纵向方向上的延长线与以待强夯点为圆心、以夯坑的实际直径d3为直径的圆相切,且;l2为构建的四边形中,相邻两个夯坑之间的间距;
20、若既不满足夯点模式四,又不满足夯点模式三,也不满足夯点模式二,则为强夯机匹配夯点模式一,强夯机单次启停允许强夯的夯点数量为1点。
21、进一步地,在夯点模式四下,在s400中,若满足路径一,则强夯机能够按照匹配的第n次行走时的夯点模式四下对应的行走路径进行行走,其中,满足路径一的条件为:;若不能满足路径一的条件,则切换至夯点模式三;在夯点模式三下,在s400中,若满足路径二,则强夯机能够按照匹配的第n次行走时的夯点模式三下对应的行走路径进行行走,其中,满足路径二的条件为:;l4为在强夯机行走的路径二两侧的两个夯坑之间的间距;若不能满足路径二的条件,则切换至夯点模式二;在夯点模式二下,在s400中,使强夯机靠近待强夯点一侧的侧边在纵向方向上的延长线与以待强夯点为圆心、以夯坑的实际直径d3为直径的圆相切,并直接匹配路径三;若不能满足夯点模式二的条件,则切换至夯点模式一,并按照夯点模式一中对应的路径四行走。
22、进一步地,在s200中,当强夯的夯点布置形式为正六边形时,强夯机需要工作的次数为2次。
23、进一步地,在s200中,当强夯的夯点布置形式为梅花形时,强夯机需要工作的次数为4次。
24、本发明的有益效果是:本发明的一种高承载力地基施工方法在强夯机工作前,通过强夯的类型,将强夯的图型进行分解,判断强夯机第n次行走时的夯点模式,并匹配路径,尽可能的使强夯机在同一停车点尽可能地增加夯点的个数,以此来减少强夯机的启停次数和移动路径,提高了工作效率并缩短了施工工期,且可以预见的是,地基面积越大,夯点越多时,相对于常规的施工方法的效率提升越明显。
技术特征:
1.一种高承载力地基施工方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种高承载力地基施工方法,其特征在于:在s500后,还包括以下步骤:
3.根据权利要求1所述的一种高承载力地基施工方法,其特征在于:在s200中,当强夯的夯点布置形式为正方形时,强夯机需要工作的次数为3次。
4.根据权利要求1所述的一种高承载力地基施工方法,其特征在于:在s200中,按照强夯机需要行走的次数对每遍强夯的夯点进行标记。
5.根据权利要求1所述的一种高承载力地基施工方法,其特征在于:在s200中,还包括:获取夯点的坐标信息。
6.根据权利要求1所述的一种高承载力地基施工方法,其特征在于:
7.根据权利要求6所述的一种高承载力地基施工方法,其特征在于:在夯点模式四下,在s400中,若满足路径一,则强夯机能够按照匹配的第n次行走时的夯点模式四下对应的行走路径进行行走,其中,满足路径一的条件为:;若不能满足路径一的条件,则切换至夯点模式三;在夯点模式三下,在s400中,若满足路径二,则强夯机能够按照匹配的第n次行走时的夯点模式三下对应的行走路径进行行走,其中,满足路径二的条件为:;l4为在强夯机行走的路径二两侧的两个夯坑之间的间距;若不能满足路径二的条件,则切换至夯点模式二;在夯点模式二下,在s400中,使强夯机靠近待强夯点一侧的侧边在纵向方向上的延长线与以待强夯点为圆心、以夯坑的实际直径d3为直径的圆相切,并直接匹配路径三;若不能满足夯点模式二的条件,则切换至夯点模式一,并按照夯点模式一中对应的路径四行走。
8.根据权利要求1所述的一种高承载力地基施工方法,其特征在于:在s200中,当强夯的夯点布置形式为正六边形时,强夯机需要工作的次数为2次。
9.根据权利要求1所述的一种高承载力地基施工方法,其特征在于:在s200中,当强夯的夯点布置形式为梅花形时,强夯机需要工作的次数为4次。
技术总结
本发明涉及工程机械技术领域,具体涉及一种高承载力地基施工方法,高承载力地基施工方法包括:在强夯机工作前,通过强夯的类型,将强夯的图型进行分解,根据不同类型的强夯的夯点布置进行夯点的匹配,判断强夯机第n次行走时的夯点模式,并匹配路径,在每次启停时,使强夯机在同一停车点尽可能地增加夯点的个数,以此来减少强夯机的启停次数和移动路径,提高了工作效率并缩短了施工工期,且可以预见的是,地基面积越大,夯点越多时,相对于常规的施工方法的效率提升越明显。
技术研发人员:宋玉光,田丽媛,宋金光,刘润青,王冰,常岩研,姚媛,何晓闪,韩伟,陈同
受保护的技术使用者:中大(天津)建设集团有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!