矿用挖掘机智能除尘控制系统及方法与流程
本发明属于挖掘机除尘,尤其涉及一种矿用挖掘机智能除尘控制系统及方法。
背景技术:
1、露天矿山开采环保要求较高,其中粉尘污染是一项很重要的指标,矿用挖掘机在挖掘过程中会产生粉尘较大不仅对环境污染严重,对人体危害也比较大,同时对参与生产的矿用挖掘机使用寿命同样有比较大的影响。
2、现有技术中,矿用挖掘机在挖掘过程中,为抑制粉尘产生常采用洒水车在矿用挖掘机工作时进行常时间洒水抑尘,在此过程中,不仅增加了水资源浪费,还不能精准对粉尘产生时进行及时抑制。
技术实现思路
1、为至少部分地解决上述现有技术中存在的技术问题,本发明提供一种矿用挖掘机智能除尘控制系统及方法。
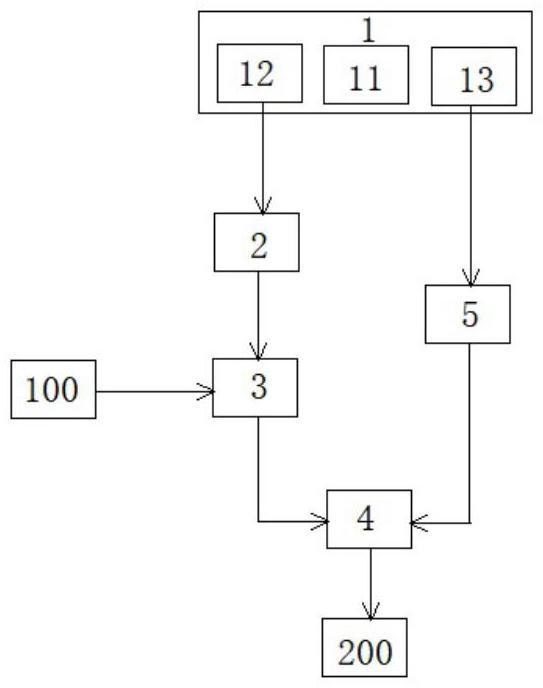
2、本发明的矿用挖掘机智能除尘控制系统,包括:
3、控制面板,所述控制面板用于控制模式选择;
4、采集模块,所述采集模块与所述控制面板连接,用于采集铲斗相对斗杆角速度、斗杆与铲斗铰接处相对铲斗力矩和斗杆与铲斗铰接处力矩变化量;
5、双信号检测模块,所述双信号检测装置输入端分别与所述采集模块输出端和矿用挖掘机主控器输出端连接,用于检测采集模块和矿用挖掘机主控器输入信息进行处理;
6、喷洒装置开关,所述双信号检测模块输出端和所述控制面板输出端分别与所述喷洒装置开关输入端连接,用于控制除尘装置工作。
7、进一步地,在上述矿用挖掘机智能除尘控制系统中,所述控制面板包括系统开关、自动模块和手动模块,所述自动模块和所述手动模块输入端分别与所述系统开关输出端连接,所述自动模块输出端与所述采集模块电连接,所述手动模块输出端与所述喷洒装置开关电连接。
8、进一步地,在上述矿用挖掘机智能除尘控制系统中,所述手动模块与所述喷洒装置开关之间设置有手动喷洒开关,所述手动喷洒开关输出端与所述喷洒装置开关输入端电连接。
9、本发明的矿用挖掘机智能除尘控制方法包括:
10、对矿用挖掘机智能除尘控制系统进行自动模式或手动模式的选择;
11、当选择自动模式时,自动模块对采集模块进行供电,采集模块得电后对铲斗相对斗杆角速度、斗杆与铲斗铰接处相对铲斗力矩和斗杆与铲斗铰接处力矩变化量进行采集;
12、当双信号检测模块检测到采集模块中斗杆与铲斗铰接处相对铲斗力矩值在单位时间内力矩变化量设定范围内增加,且铲斗相对斗杆正向旋转角速度大于0,同时通过矿用挖掘机主控器检测到挖掘机回转角速度为0时,对喷洒装置开关发送工作控制信号,控制除尘装置正常工作;
13、当双信号检测模块通过矿用挖掘机主控器检测到挖掘机回转角速度大于0时,对喷洒装置开关发送停止控制信号,控制除尘装置停止工作;
14、当双信号检测模块检测到采集模块中斗杆与铲斗铰接处相对铲斗力矩值在单位时间内力矩变化量设定范围内降低,且铲斗相对斗杆反向旋转角速度大于0,同时通过矿用挖掘机主控器检测到挖掘机回转角速度为0时,对喷洒装置开关发送工作控制信号,控制除尘装置正常工作;
15、当选择手动模式时,手动模块对手动喷洒开关进行供电,当按下手动喷洒开关时,对喷洒装置开关发送工作控制信号,控制除尘装置正常工作;
16、当松开手动喷洒开关时,对喷洒装置开关发送停止控制信号,控制除尘装置停止工作。
17、本发明的矿用挖掘机智能除尘控制系统及方法具有如下优点和有益效果:
18、本发明通过双信号检测模块与采集模块和矿用挖掘机主控器的配合,实时反映挖掘机状态,并根据矿用挖掘机工作时,在容易粉尘产生步骤中进行精准喷水抑尘,同时减少了水资源浪费。
技术特征:
1.一种矿用挖掘机智能除尘控制系统,其特征在于,所述矿用挖掘机智能除尘控制系统,包括:
2.根据权利要求1所述的矿用挖掘机智能除尘控制系统,其特征在于,所述控制面板包括系统开关、自动模块和手动模块,所述自动模块和所述手动模块输入端分别与所述系统开关输出端连接,所述自动模块输出端与所述采集模块电连接,所述手动模块输出端与所述喷洒装置开关电连接。
3.根据权利要求2所述的矿用挖掘机智能除尘控制系统,其特征在于,所述手动模块与所述喷洒装置开关之间设置有手动喷洒开关,所述手动喷洒开关输出端与所述喷洒装置开关输入端电连接。
4.一种矿用挖掘机智能除尘控制方法,其特征在于,所述矿用挖掘机智能除尘控制方法包括:
技术总结
本发明公开了一种矿用挖掘机智能除尘控制系统及方法,矿用挖掘机智能除尘控制系统,包括:控制面板,控制面板用于控制模式选择;采集模块,采集模块与控制面板连接,用于采集铲斗相对斗杆角速度、斗杆与铲斗铰接处相对铲斗力矩和斗杆与铲斗铰接处力矩变化量;双信号检测模块,双信号检测装置输入端分别与采集模块输出端和矿用挖掘机主控器输出端连接,用于检测采集模块和矿用挖掘机主控器输入信息进行处理;喷洒装置开关,双信号检测模块输出端和控制面板输出端分别与喷洒装置开关输入端连接,用于控制除尘装置工作。本发明可实时反映挖掘机状态,并根据矿用挖掘机工作时,在容易粉尘产生步骤中进行精准喷水抑尘,同时减少了水资源浪费。
技术研发人员:曹有常,郭刚,陈馨
受保护的技术使用者:太重集团(上海)装备技术有限公司
技术研发日:
技术公布日:2025/4/24
- 还没有人留言评论。精彩留言会获得点赞!