已学习模型的生成方法及路面特征判定装置与流程
1.本发明涉及一种已学习模型的生成方法及路面特征判定装置。
背景技术:
2.道路由于受到车辆车轮的载荷作用、温度变化或雨水的影响而受损,并产生裂缝、车辙、路面网裂或坑槽。为了迅速掌握这样的道路的损坏情况并维持管理道路,日常进行用于掌握道路的路面特征的作业。
3.作为掌握路面特征的方法,一般有如下方法:将收集用于掌握路面凹凸的信息的信息收集装置提前设置在检测车上,利用该检测车在道路上行驶时,通过解析由信息收集装置收集到的信息来掌握路面特征。例如,如jp2019-108755a所公开的那样,信息收集装置具备用于检测因检测车行驶的路面引起的振动的加速度传感器、用于获取行驶路面的扫描数据的数码相机等摄影装置以及激光扫描仪,并收集与路面状态相关的信息。
4.如此一来,检测车在道路上行驶时获得的信息经由因特网通信网络等发送至服务器中存储,并用于之后的路面特征判定装置的解析。在路面特征判定装置中,例如对扫描数据进行解析,在求出国际粗糙度指数(international roughness index,以下简称为“iri”)的同时,判定车辙深浅和有无产生裂缝。另外,所谓国际粗糙度指数,是指将仅取出2轴4轮车辆中的1个轮子的虚拟车辆模型作为四分之一车,将四分之一车以时速80km在路面上行驶时车辆所受到的上下方向的运动位移的累积值与行驶距离之比作为路面的粗糙度,是铺设路面的凹凸的评价指数。
5.该iri值用于判定是否需要修补道路宽度较大的道路,管理道路的地方政府目前正在获取iri值数据,并向国家申请修补中。现有技术文献专利文献
6.专利文献1:jp2019-108755a
技术实现要素:
发明所要解决的课题
7.如前所述,为了获取iri值,需要获取并解析扫描后的图像数据,而获取并解析图像数据所需花费的成本很高。
8.因此,本发明的目的在于提供一种能够以低成本高精度地判定路面特征的已学习模型的生成方法及路面特征判定装置。用于解决课题的方案
9.为了达到上述目的,本发明的已学习模型的生成方法将包含从车辆行驶时检测到的振动信息中利用至少一个以上的频带来提取的数据在内的样本数据作为教师数据,通过机器学习来预先学习所述路面特征,生成已学习模型。在以这种方式构成的已学习模型的生成方法中,将与路面特征的劣化密切相关的频带内振动作为教师数据给出,由于判定部
对路面特征进行机器学习并生成已学习模型,因此在机器学习后能够高精度地进行路面特征的判定。
10.进一步地,已学习模型的生成方法具备:振动信息收集步骤,其在车辆行驶时通过振动信息收集装置收集振动信息;路面特征学习步骤,其将包含从振动信息中利用至少一个以上的频带来提取的数据在内的样本数据作为教师数据,路面特征判定装置通过机器学习来预先学习路面特征,生成已学习模型。在以这种方式构成的已学习模型的生成方法中,能够通过两个装置简单地生成已学习模型。
11.此外,本发明的路面特征判定装置是用于从车辆行驶时检测到的振动信息来判定车辆行驶的道路的路面特征的路面特征判定装置,其具有已学习模型,该已学习模型将包含从振动信息中利用至少一个以上的频带来提取的数据在内的样本数据作为教师数据,通过机器学习来预先学习路面特征而得到,并具备判定部,该判定部用于基于所述已学习模型,对与样本数据具有相同类型的新数据的输入,进行路面特征的判定。在以这种方式构成的路面特征判定装置中,判定部将与路面特征的劣化密切相关的频带内振动作为教师数据给出,由于判定部对路面特征进行机器学习,因此在机器学习后能够高精度地进行路面特征的判定。此外,路面特征判定装置利用与从振动信息中获得的样本数据具有相同类型的新数据来判定路面特征,因此在进行路面特征的判定处理时,不需要对扫描路面凹凸后的图像数据进行解析那样的高成本解析。
12.此外,为了达到上述目的,根据本发明的其他路面特征判定装置是用于从车辆行驶时检测到的振动信息来判定车辆行驶的道路的路面特征的路面特征判定装置,其具有已学习模型,该已学习模型将包含从振动信息中利用至少一个以上的频带来提取的数据在内的样本数据作为教师数据,通过机器学习生成,并具备判定部,该判定部用于基于已学习模型,对与样本数据具有相同类型的新数据的输入,进行所述路面特征的判定。在以这种方式构成的路面特征判定装置中,具有已学习模型,该已学习模型判定部将与路面特征的劣化密切相关的频带内振动作为教师数据,通过机器学习生成,能够基于已学习模型高精度地进行路面特征的判定。此外,路面特征判定装置利用与从振动信息中获得的样本数据具有相同类型的新数据来判定路面特征,因此在进行路面特征的判定处理时,不需要对扫描路面凹凸后的图像数据进行解析那样的高成本解析,也不需要检查员的目视作业。
13.此外,路面特征判定装置中的判定部具有多个项目学习部,该项目学习部与表示路面特征的多个项目中的每一个相对应,并仅对相对应的项目进行路面特征的学习,项目学习部也可以仅针对与新数据的输入相对应的所述项目来判定所述路面特征。根据以这种方式构成的路面特征判定装置,由于具备项目学习部,因此能够按照路面特征的每个项目进行高精度的判定,其中,该项目学习部专门针对与以不同尺度表示路面特征的每个项目相对应的项目进行机器学习及判定。
14.进一步地,路面特征判定装置中的项目学习部可以具有多个按行驶条件分类的学习部,该按行驶条件分类的学习部针对车辆的每个行驶条件,按照对应的每个行驶条件来机器学习路面特征。根据以这种方式构成的路面特征判定装置,按表示路面特征的每个项目进行符合行驶条件的机器学习及判定,因此即使行驶条件不同也能够按路面特征的每个项目进行高精度的判定。
15.此外,路面特征判定装置也可以具备判断部,其根据将同一标签的各个样本数据
的平均值作为坐标的基准点、以及被判定为属于同一标签的新数据,来判断新数据是否异常。以这种方式构成的路面特征判定装置能够向路面特征判定装置的操作者提示判定部再次进行机器学习的必要性和新标签的必要性。
16.并且,路面特征判定装置也可以具备输入数据运算部,该输入数据运算部用于从振动信息的原始数据中截取预定时间量的数据,对截取的预定时间量的数据进行处理以求出新数据,并输入到判定部中,输入数据运算部执行重叠处理并依次求出新数据,其中,重叠处理用于使在求出前一个新数据时截取的数据与在求出下一个输入的新数据时截取的数据的一部分重复。如此一来,路面特征判定装置由于进行重叠处理,因此能够掌握每个时间区间的路面特征,并且利用即便是时间分割线附近处信息也没有缺少的样本数据和新数据来进行机器学习和判定。因此,能够高精度地判定路面特征。
17.并且,在路面特征判定装置中,振动信息也可以包含车辆的簧上部件的加速度。根据以这种方式构成的路面特征判定装置,能够使用与车辆乘坐舒适性直接相关的簧上加速度来判定路面特征,并且能够从车辆乘坐舒适性的观点出发来判定路面特征。
18.此外,在路面特征判定装置中,样本数据及新数据也可以包含利用至少一个以上的频带提取出的局部振动总量值。根据以这种方式构成的路面特征判定装置,由于将明确表示频带内振动强度的值、即与路面特征的关联度较强的局部振动总量值作为特征量包含在样本数据及新数据中,因此判定部对路面特征的判定精度得以提高。
19.进一步地,在路面特征判定装置中,样本数据及新数据也可以包含车辆的簧下加速度除以车辆的速度后得到的值。根据以这种方式构成的路面特征判定装置,无论车辆的行驶速度如何,都能够高精度地判定路面特征。
20.此外,在路面特征判定装置中,样本数据及新数据也可以包含车辆的簧下加速度的最大值除以簧下加速度的有效值后得到的值。根据以这种方式构成的路面特征判定装置,能够更准确地掌握路面是整体粗糙还是局部粗糙的路面特征,并且能够高精度地判定路面特征。
21.进一步地,在路面特征判定装置中,样本数据及新数据也可以包含车辆的簧上部件的最高值、平均值、中间值、最低值、方差及标准偏差。根据以这种方式构成的路面特征判定装置,能够使用代表簧上部件的振动信息的指标对路面特征进行机器学习及判定。发明效果
22.根据本发明的已学习模型的生成方法及路面特征判定装置,能够以低成本高精度地进行路面特征的判定。
附图说明
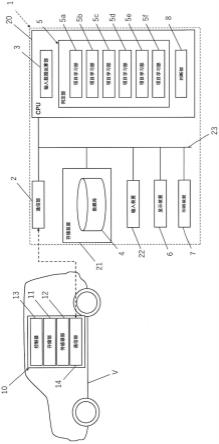
23.图1是示出第一实施方式中的路面特征判定装置的系统结构的图。图2是示出振动信息收集装置中的传感器部的图。图3是示出振动信息收集装置中的控制器的硬件结构的图。图4是示出将数据库中存储的位置信息与路面特征项目建立关联的数据结构的示例图。图5是说明输入数据运算部的原始数据的处理的图。图6是示出利用第一实施方式中的路面特征判定装置的样本数据进行学习的机器
学习过程的示例的图。图7是示出对第一实施方式中的路面特征判定装置的新数据进行处理的判定过程的示例图。图8是示出第二实施方式中的路面特征判定装置的项目学习部的系统结构的图。
具体实施方式
24.《第一实施方式》下面,基于图中所示的实施方式对本发明进行说明。如图1所示,第一实施方式中的路面特征判定装置1具备以下部件而构成:通信部2,其能够与收集振动信息的振动信息收集装置10进行通信;输入数据运算部3,其对经由通信部2接收到的振动信息的原始数据进行处理;数据库4,其存储与地点信息建立关联的路面特征;判定部5,其具备多个项目学习部5a、5b、5c、5d、5e、5f,并判定路面特征;显示装置6,其显示由判定部5判定出的路面特征;以及印刷装置7,其能够将由判定部5判定出的路面特征的判定结果印刷到纸介质上。
25.下面,将对路面特征判定装置1进行详细说明。路面特征判定装置1对从收集振动信息的振动信息收集装置10发送来的振动信息进行处理,并判定路面特征。
26.振动信息收集装置10搭载在作为四轮汽车的车辆v上,收集振动信息,并将收集到的振动信息发送到设置在基地的路面特征判定装置1中。如图1所示,振动信息收集装置10具备:存储部11,其能够存储信息;传感器部12,其检测车辆v的振动信息;控制器13,其将由传感器部12检测到的振动信息和作为与其他车辆相关的信息的车辆信息存储在存储部11中;以及通信部14,其由控制器13控制,并将存储在存储部11中的振动信息等信息发送到路面特征判定装置1中。
27.振动信息收集装置10通过接收由车辆v的未图示的电池供应的电力来操作。当未图示的点火开关接通时,振动信息收集装置10接收由电池供应的电力,收集由传感器部12检测到的振动信息及所述车辆信息并存储在存储部11中;当点火开关断开时,将存储在存储部11中的振动信息及其他信息通过通信部14发送到路面特征判定装置1中。
28.存储部11由控制器13控制,并根据来自控制器13的指令存储所述振动信息及其他车辆的信息。当启动处理结束时,控制器13在每个预定的信息存储时间将所述振动信息及所述车辆信息的数据与得到该数据的时刻建立关联的同时,生成按照以相同的采样率收集到的每个数据汇总的文件,并存储在存储部11中。
29.另外,存储部11例如由闪存等非易失性半导体存储器构成,但并不受限于闪存,也可以是磁盘等。此外,存储部11也可以具备辅助存储装置,该辅助存储装置由光盘等存储介质和能够读写存储介质的数据的驱动器构成。
30.通信部14由控制器13控制,并且能够与设置在外部的路面特征判定装置1进行通信,将存储在存储部11中的振动信息及其他车辆信息的原始数据发送到路面特征判定装置1中。通信部14具备未图示的天线单元,在本实施方式中,进行ieee802.11标准的无线lan(local area network)通信,但也可以通过电话线或因特网通信网络与路面特征判定装置1进行通信。
31.如图2所示,作为用于检测车辆v的振动信息的传感器,传感器部12具备:4个加速度传感器15a、15b、15c、15d,其分别检测簧上加速度以作为车辆v的四个车轮中各个车轮在
正上方的上下方向的加速度;4个加速度传感器16a、16b、16c、16d,其检测簧下加速度以作为四个车轮中各个车轮在上下方向的加速度;行程传感器17a、17b、17c、17d,其检测四个车轮中各个车轮相对于车身的行程位移;以及三轴陀螺传感器19,其安装在车辆v的车身上并用于检测车身绕前后、左右、上下三轴旋转的角速度;除以上传感器外,还具备用于检测车辆v的位置信息的位置检测装置18。另外,位置信息由经度和纬度构成,位置检测装置18利用全球定位卫星系统检测经度和纬度以作为车辆v的位置信息。
32.此外,在本实施方式中,振动信息收集装置10除了收集由传感器部12检测到的振动信息以外,还通过车辆v的未图示的obd(车载自动诊断系统)端子,收集由预先搭载在车辆v上的车载传感器等检测到的车辆v的速度、发动机转速、发动机水温、油门开度、刹车操作、雨刷器驱动状况等车辆信息。另外,振动信息是车身、车轮及悬架的加速度、速度、位移、车身旋转方向的角加速度、角速度、角位移等与车辆v的振动相关的信息,不包含扫描路面凹凸后的图像数据。振动信息收集装置10可以从所述多种类型的振动信息中任意选择,只要能够获得路面特征判定装置1的判定所需的车辆v的振动信息即可。另外,虽然不包含在振动信息中,但是为了掌握路面的位置,振动信息收集装置10如前所述那样地收集位置信息。此外,振动信息收集装置10也可以具备拍摄路面的未图示的照相机并将图像数据与振动信息一起收集,以便有助于路面特征判定装置1的操作者确认路面特征。
33.如图3所示,控制器13具备cpu(central processing unit)13a、存储器13b、接口13c、以及将这些装置可相互通信地进行连接的总线13d。此外,控制器13通过总线13d与存储部11及通信部14可相互通信地进行连接。此外,控制器13在经由接口13c与传感器部12连接以便能够接收传感器部12检测到的信息的同时,能够经由接口13c以及未图示的obd端子接收车载传感器检测到的信息。
34.cpu13a通过执行操作系统及其他程序来控制振动信息收集装置10中的存储部11及通信部14,并且对传感器部12及车载传感器检测到的各种信息进行处理。存储器13b除了rom(read only memory)之外,还具备用于提供cpu13a的运算处理所需的存储区域的ram(random access memory),并将cpu13a的运算处理中使用的程序存储在rom中。另外,cpu13a的运算处理中使用的程序也可以存储在存储部11中。
35.并且,控制器13通过执行cpu13a作为振动信息收集装置10发挥功能所需的程序,将传感器部12及车载传感器检测到的各种信息的数据暂时存储在存储器13b中固定的缓冲存储器中,对缓冲存储器中存储的所述各种信息的数据进行处理并生成文件,并将文件存储在存储部11中,进而,将存储在存储部11中的文件从通信部14发送到外部的路面特征判定装置1中(振动信息收集步骤)。
36.如前所述,当点火开关接通且启动处理结束时,控制器13将传感器部12及车载传感器检测到的各种信息的数据中由采样率相同的传感器获得的数据存储到一个文件中。更详细地说,控制器13执行记录器进程,并存储到存储部11中,其中,该记录器进程在将传感器部12及车载传感器检测到的数据与得到该数据时的时刻建立关联的同时,按照每个预定信息存储时间在该信息存储时间内将由相同采样率的传感器得到的数据进行彼此汇总,并生成一个文件。在本实施方式中,信息存储时间为1分钟,但是也可以设定为1分钟以外的时间。
37.本实施方式中的控制器13将所述振动信息和所述车辆信息中的数据的每一个与
时刻建立关联并存储在缓冲存储器中,按照由采样率相同的传感器获得的每个数据将存储在缓冲存储器内的数据中的、1分钟内获得的所述振动信息和所述车辆信息中的数据束作为单独的文件存储在存储部11中。
38.接下来,当点火开关断开时,控制器13结束从传感器部12及车载传感器获得的各种信息的收集,并经由通信部14将存储有各种信息的文件发送到路面特征判定装置1中。
39.控制器13以这种方式执行文件的发送处理,当存储部11中存储的所有文件的发送完成时,结束处理并关闭。
40.如前所述,从振动信息收集装置10接收文件的路面特征判定装置1设置在车辆v的基地中。在本实施方式中,路面特征判定装置1对从振动信息收集装置10接收的文件进行存储的同时进行处理。如前所述,第一实施方式中的路面特征判定装置1具备以下部件而构成:通信部2,其能够与收集振动信息的振动信息收集装置10进行通信;输入数据运算部3,其对经由通信部2接收到的振动信息的原始数据进行处理;数据库4,其存储与地点信息建立关联的路面特征;判定部5,其具备多个项目学习部5a、5b、5c、5d、5e、5f,并判定路面特征;显示装置6,其显示由判定部5判定出的路面特征;以及印刷装置7,其能够将由判定部5判定出的路面特征的判定结果印刷到纸介质上。判定部5将输入数据运算部3预先求出的样本数据作为教师数据进行机器学习,在使用样本数据的机器学习后针对新数据的输入判定路面特征。
41.如图1所示,路面特征判定装置1的硬件是计算机系统,并且具备cpu20、存储装置21、键盘和鼠标等输入装置22、显示装置6、印刷装置7及通信部2、以及用于将这些装置可相互通信地进行连接的总线23而构成。
42.cpu20通过执行操作系统及其他程序来进行运算处理,并进行存储装置21、输入装置22、通信部2、数据库4、显示装置6及印刷装置7的控制。此外,cpu20通过执行用于作为路面特征判定装置1发挥功能的程序,实现输入数据运算部3及判定部5。
43.在设置有路面特征判定装置1的基地中设有车辆v的停车位,在停车位的附近设置有通信部2,该通信部与振动信息收集装置10中的通信部14可相互进行无线lan通信。通信部2由cpu20控制,能够与振动信息收集装置10进行通信,并接收从振动信息收集装置10发送的振动信息及车辆信息的原始数据。通信部2具备未图示的天线单元,在本实施方式中与通信部14相同,进行ieee802.11标准的无线lan(local area network)通信,但也可以通过电话线或因特网通信网络与振动信息收集装置10进行通信。在停车位与路面特征判定装置1之间的距离较长的情况下,通信部2也可以具备未图示的中继器,并能够经由中继器与振动信息收集装置10进行无线通信。
44.存储装置21除了具备rom及ram之外,还具备硬盘。此外,存储装置21在存储数据库4和路面特征判定装置1的控制所需的程序的同时,提供cpu20中的处理所需的存储区域。另外,存储装置21也可以具备辅助存储装置或半导体存储器,该辅助存储装置或半导体存储器由磁盘、光盘等存储介质和能够读写存储介质的数据的驱动器构成。显示装置6具备用于显示cpu20处理后的数据等的画面,例如是液晶显示器等。印刷装置7是例如将cpu20处理过的数据等印刷到纸介质上的打印机等。
45.当通过通信部14从振动信息收集装置10接收到振动信息及车辆信息的数据的文件时,cpu20将接收到的文件存储在存储装置21中。
46.此外,在存储装置21内存储的数据库4中,存储有地点信息和与地点信息建立关联的路面特征的数据。路面特征是随时间推移由车辆行驶荷载等引起的路面劣化或损坏的总称,并通过各种定量化指标来进行把握。具体而言,路面特征可通过各种指标,定量地表示现象不同的粗糙度、裂缝、车辙这样的路面状态的路面特征值等来把握。例如,路面特征通过iri、车辙深度、裂缝率、平整度、mci、有无坑槽等表示路面特征的各项目来把握。iri是与铺设路面的凹凸相关的评价指数,单位为m/km或mm/m,是表示值越大铺设路面的凹凸就越大的指标,也是表示作为路面特征之一的路面粗糙度的状态的指数。一般来说,在高速公路上,当iri值超过4m/km时,判断路面受损。车辙深度是表示路面车辙深浅的值,也是表示作为路面特征之一的车辙深浅的值。裂缝率是裂缝面积除以调查对象划分面积后得到的值,是表示作为路面特征之一的裂缝程度的值。平整度是相对于想要测量的纵断面轮廓与假设平坦的铺设路面之间的高低差的平均值的标准偏差值,是表示作为路面特征之一的平整程度的值。mci(maintenace control index),被称为路面养护指数,是通过裂缝率、车辙深度以及平整度这3个路面特征值来定量地评价路面使用性能的指标,也是进行作为路面特征之一的养护判断的综合指标。更详细而言,mci以10分为最高分,随着路面的劣化而降低,并且通过按照每个平整度值准备的裂缝率和车辙深度的矩阵表来求出。坑槽是在因经年劣化而产生的裂缝或从路面接缝等处渗透的水和交通荷载的作用下,因路面劣化损坏面扩大而产生的,其明显降低了通行车辆的安全性能,有无这些坑槽表示车辆通行时路面特征的危险程度。为了以这种方式掌握路面特征,需要参照各种指标和定量化后的值,这些指标和值有助于判断是否需要进行道路修补。
47.并且,在数据库4中,在预先判明了用于表示道路位置中的路面特征的指标或值的情况下,存储与用于表示道路位置和路面特征的各指标或值建立关联的数据。具体而言,例如,如图4所示,在数据库4中,将确定道路位置的坐标与前述路面特征的所有项目相关联地进行登记。
48.输入数据运算部3对经由通信部2接收到的振动信息和车辆信息的原始数据进行处理。输入数据运算部3通过cpu20执行程序并执行输入数据运算部3的处理来实现。输入数据运算部3截取在文件中存储的1分钟分量的簧上加速度、簧下加速度以及行程位移的振动信息的原始数据中作为预定时间的3秒钟分量的振动信息的原始数据,并对其进行处理之后,求出输入到判定部5中的样本数据及新数据。样本数据与原始数据获得的位置信息建立关联,是判定部5为了对路面特征的各项目进行机器学习而提供的教师数据,是输入数据运算部3根据车辆v在预先判明路面特征的路面上行驶时获得的振动信息而求出的数据,在对路面特征项目附加了标签的状态下提供给判定部5。在路面特征的各项目中,将获得iri、车辙深度、裂缝率、平整度、mci数据的路面的定量值作为标签、并将获得坑槽数据的路面是否有坑槽作为标签与数据建立关联,生成教师数据。如此,所谓附加标签,是指将得到数据的实际路面的路面特征的各项目的标签与数据建立关联。
49.与此相对,新数据与位置信息建立关联,是未对路面特征项目附加标签的数据,是判定部5在机器学习路面特征后输入到判定部5中的数据。即,新数据是由输入数据运算部3对由振动信息收集装置10收集到的原始数据进行处理后的数据,但未与路面特征的各项目信息建立关联,是为了对路面特征的各项目进行判定而输入到判定部5中的数据。
50.在判定部5中,将样本数据作为教师数据,为了判定路面特征的各项目而进行机器
学习,因此新数据也需要利用与为了获得样本数据而对原始数据实施的处理相同的处理而得到的相同类型的数据来进行判定。因此,详细内容如后所述,在本实施方式中,样本数据和新数据是对原始数据实施相同处理后得到的4个簧上加速度、簧下加速度以及行程位移的最大值、最小值、平均值、中间值、标准偏差、方差、0.2hz至3hz的频带的poa值、3hz至8hz的频带的poa值、8hz至20hz的频带的poa值及15hz至30hz的频带的poa值、簧下加速度除以车辆v的速度后得到的值、以及簧下加速度的最大值除以簧下加速度的有效值后得到的值等各值。另外,样本数据及新数据也可以包括以预定时间截取的原始数据,而无需进行获得原始数据的最大值或poa值的处理。
51.如此,判定部5根据带有标签的样本数据预先对路面特征进行机器学习,并针对新数据的输入,输出对路面特征的各项目的判定结果。
52.输入数据运算部3执行重叠处理,并依次求出新数据,其中,重叠处理用于使在求出前一个样本数据或新数据时截取的原始数据与在求出下一个要输入到判定部5中的样本数据或新数据时截取的原始数据的一部分重复。详细而言,如图5所示,将重叠的时间设为2秒钟,输入数据运算部3一边每隔1秒钟错开时间,一边从作为预定时间的3秒钟的原始数据中依次生成样本数据或新数据,根据1分钟的振动信息的原始数据求出57个数据集。另外,在前述示例中,将输入数据运算部3从振动信息的原始数据中截取的预定时间设为3秒钟,但是也可以任意设定。
53.并且,输入数据运算部3对前述数据集中包含的由传感器部12检测到的4个簧上加速度、4个簧下加速度以及4个行程位移的原始数据进行处理,分别对4个簧上加速度、簧下加速度以及行程位移求出最大值、最小值、平均值、中间值、标准偏差以及方差,将这些值作为特征量包含在样本数据及新数据中。
54.车辆行驶中的振动根据强度的不同,会使车辆搭乘者在每个频带感觉到不同程度的不适感。例如,从0.2hz到3hz的频带内振动会使搭乘者感觉到轻飘飘的,从3hz到8hz的频带内振动会使搭乘者感觉到凹凸不平,从8hz到20hz的频带内振动会使搭乘者感觉到咯噔咯噔,从15hz到30hz的频带内振动会使搭乘者感觉到异响。此外,对于振动频率在16hz左右的振动和振动频率在5hz左右的振动,搭乘者会感觉到不同程度的不适感。如此,搭乘者对不同频带的振动会感觉到不同程度的不适感。
55.在比较平坦的路面上,从0.2hz至3hz的频带内振动较大而使搭乘者感觉到轻飘飘的情况下,认为路面发生劣化,从3hz至8hz的频带内振动较大而使搭乘者感觉到凹凸不平的情况下,认为路面有可能产生了裂缝。如此,因振动频带的振动强度而使搭乘者感觉到的不适感是由路面特征所引起的。
56.因此,输入数据运算部3将利用预先确定的频带从作为预定时间的3秒钟分量的4个簧上加速度、簧下加速度以及行程位移的原始数据中提取出的数据包含在样本数据及新数据中。更详细地说,输入数据运算部3针对4个簧上加速度、簧下加速度以及行程位移来求出预先确定的预定频带内振动的功率值之和的值,并将该值包含在样本数据及新数据中。即,输入数据运算部3通过cpu20分别对4个簧上加速度、4个簧下加速度以及4个行程位移的原始数据执行快速傅里叶变换(fft)分析处理的运算,来求出振动的功率谱,并求出所述预定频带内振动的功率值(强度)的总和。将输入数据运算部3以这种方式获得的值作为特征量包含在样本数据及新数据中,并输入到判定部5中。预定频带是指在车辆行驶中给搭乘者
带来不适感的频带。在车辆行驶中给搭乘者带来不适感的频带的振动被认为是因路面特征的劣化而引起的,如此一来输入数据运算部3求出的值成为有助于掌握路面特征的情况的指标。
57.在本实施方式中,输入数据运算部3对4个簧上加速度、4个簧下加速度以及4个行程位移的原始数据进行fft解析处理,求出作为多个频带的功率值的总和的局部振动总量(poa)值。具体而言,输入数据运算部3分别运算从0.2hz到3hz的频带的poa值、从3hz到8hz的频带的poa值、从8hz到20hz的频带的poa值、从15hz到30hz的频带的poa值,并将这些poa值作为特征量输入到判定部5中。另外,由于poa值是频带内振动的功率值的总和,因此是可以明确表示该频带内的振动强度的值,在与路面特征的关联度表现较强的这一点上,有利于后述的判定部5对路面特征的判定,但是也可以根据预定的频带中包含的振动振幅的平均值等的、该频带的数据来求出用于表示该频带的特征的值以作为特征量,来用作样本数据及新数据。
58.进一步地,在本实施方式中,与前述各值不同,输入数据运算部3对作为预定时间的3秒钟分量的4个簧上加速度及簧下加速度的原始数据进行处理,通过运算求出车辆v的簧下加速度除以根据车辆信息获得的车辆v的速度后得到的值和簧下加速度的最大值除以所述簧下加速度的有效值后得到的值,并将这两个值包含在样本数据及新数据中。
59.车辆v的速度越块,则簧下加速度就越大,因此有时无法正确评价路面特征。与此相对,将簧下加速度除以车辆v的速度后得到的值能够缓和车辆v在路面上行驶时的速度的影响,在本实施方式中,输入数据运算部3将其作为特征量,并用作样本数据及新数据。另外,为了缓和车辆v在路面上行驶时的速度的影响,可以利用将簧下加速度的绝对值的最大值除以车辆v的速度后得到的值,也可以对将簧下加速度的绝对值除以车辆v的速度后得到的值乘以系数等的、对该值进行处理后使用。
60.此外,当车辆v经过坑槽等一处损坏部位的情况下,由于车辆v的簧下部分发生大幅度振动,因此簧下加速度的最大值增大,但作为经过一定时间的有效值来看,该值不会增大。与此相对,当车辆v在粗糙路面上持续行驶的情况下,簧下加速度的最大值和有效值都增大。由此,将簧下加速度的最大值除以簧下加速度的有效值后得到的值成为用于表示路面是整体粗糙还是局部粗糙的指标,因此,在本实施方式中,输入数据运算部3将其作为特征量,并用作样本数据及新数据。另外,作为用于表示路面是整体粗糙还是局部粗糙的指标,除了簧下加速度的最大值除以簧下加速度的有效值后得到的值以外,还可以利用以下的值,如簧下加速度的绝对值的最大值除以簧下加速度的有效值后得到的值、簧下加速度的最大值乘以簧下加速度的有效值后得到的值、簧下加速度的有效值除以弹簧下加速度的最大值后得到的值、簧下加速度的最小值除以簧下加速度的有效值后得到的值等。
61.如前所述,本实施方式的路面特征判定装置1中的样本数据及新数据是对4个簧上加速度、簧下加速度以及行程位移的最大值、最小值、平均值、中间值、标准偏差、方差、0.2hz至3hz的频带的poa值、3hz至8hz的频带的poa值、8hz至20hz的频带的poa值及15hz至30hz的频带的poa值、簧下加速度除以车辆v的速度后得到的值、以及簧下加速度的最大值除以簧下加速度的有效值后得到的值等各值。
62.进一步地,当路面特征判定装置1的操作者针对在判明了路面特征的各项目的路面上行驶时得到的数据而输入路面特征的各项目的标签时,输入数据运算部3将标签与通
过所述处理得到的数据建立关联,生成用作教师数据的样本数据,并提供给判定部5。例如,在得到数据的路面的路面特征的各项目中,输入数据运算部3在得出iri为3m/km、车辙深度为10.0mm、裂缝率为10%、平整度为3mm、mci为5.0、没有坑槽的路面的样本数据中,当iri为3m/km、车辙深度为10mm、裂缝率为10%、平整度为3mm、mci为5.0、没有坑槽的情况下,将它们作为标签与样本数据建立关联。
63.判定部5具备按照前述的每个项目来判定路面特征的多个项目学习部5a、5b、5c、5d、5e、5f。判定部5的各项目学习部5a、5b、5c、5d、5e、5f被认为是按照学习模型进行机器学习的人工智能,通过cpu20执行程序并执行各项目学习部5a、5b、5c、5d、5e、5f的处理来实现。项目学习部5a仅对路面特征项目中的iri进行判定。具体而言,项目学习部5a将样本数据作为教师数据,为了通过机器学习来判定iri而进行机器学习,并在机器学习后针对新数据的输入,输出iri的值。项目学习部5b仅对路面特征项目中的车辙深度进行判定。具体而言,项目学习部5b将样本数据作为教师数据,为了通过机器学习来判定车辙深度而进行机器学习,并在机器学习后针对新数据的输入,输出车辙深度的值。项目学习部5c仅对路面特征项目中的裂缝率进行判定。具体而言,项目学习部5c将样本数据作为教师数据,为了通过机器学习来判定裂缝率而进行机器学习,并在机器学习后针对新数据的输入,输出裂缝率的值。项目学习部5d仅对路面特征项目中的平整度进行判定。具体而言,项目学习部5d将样本数据作为教师数据,为了通过机器学习来判定平整度而进行机器学习,并在机器学习后针对新数据的输入,输出平整度的值。项目学习部5e仅对路面特征项目中的mci进行判定。具体而言,项目学习部5e将样本数据作为教师数据,为了通过机器学习来判定mci而进行机器学习,并在机器学习后针对新数据的输入,输出mci的值。项目学习部5f仅对路面特征项目中的是否有坑槽进行判定。具体而言,项目学习部5f将样本数据作为教师数据,为了通过机器学习来判定是否有坑槽而进行机器学习,并在机器学习后针对新数据的输入,判定是否有坑槽。
64.如上所述,输入数据运算部3为了对与各项目学习部5a、5b、5c、5d、5e、5f相对应的路面特征项目进行机器学习,将前述样本数据作为教师数据输入至各项目学习部5a、5b、5c、5d、5e、5f中,并使各项目学习部5a、5b、5c、5d、5e、5f进行机器学习。
65.机器学习的模型是使用教师数据进行机器学习的机器学习模型,在根据本实施方式的路面特征判定装置1中,其为支持向量机等的识别器,但是也可以是使用反向传播或id3(iterative dichotomiser3)等学习算法的机器学习模型。
66.对于输入数据运算部3生成的针对路面特征的各项目,项目学习部5a、5b、5c、5d、5e、5f接收与标签建立关联的样本数据的输入,并且对相对应的各项目进行机器学习。样本数据的数量是项目学习部5a、5b、5c、5d、5e、5f能够充分进行机器学习的数量。项目学习部5a、5b、5c、5d、5e、5f当基于样本数据的机器学习结束并生成在判定路面特征时所使用的机器学习已完成模型时,针对与作为未与标签建立关联的未学习数据的新数据的输入,对相对应的各项目进行判定后输出。项目学习部5a、5b、5c、5d、5e、5f通过调整对样本数据的各值进行加权的参数,生成已学习模型,以便能够通过机器学习对路面特征的各项目进行高精度地推测。如前所述,已学习模型是路面特征判定装置1通过作为教师数据的样本数据的输入,来编入对用于表示路面特征的各项目进行学习后生成的已学习参数后的推理程序。这里,所谓的推理程序,是指通过应用所编入的已学习参数,能够针对所述新数据的输入,
来输出路面特征的各项目的判定结果的程序。
67.识别器是用于从样本数据中求出用于对标签进行分类的超平面,将其作为已学习模型,来识别未学习数据属于通过超平面进行划分的两个类别中的哪一个的识别器。因此,为了求出iri、车辙深度、裂缝率、平整度、mci的值,项目学习部5a、5b、5c、5d、5e在内部具有多个识别器。例如,对iri以1m/km的刻度判定5m/km以下的iri时,项目学习部5a可以多层化识别器来判定iri的值,例如判定是小于2.5m/km还是2.5m/km以上的识别器、判定是小于1.75m/km还是1.75m/km以上的识别器、判定是小于3.75m/km还是3.75m/km以上的识别器、判定是小于1m/km还是1m/km以上的识别器、判定是小于2m/km还是2m/km以上的识别器、判定是小于3m/km还是3m/km以上的识别器、判定是小于4m/km还是4m/km以上的识别器。另外,在项目学习部5a所具备的各识别器中,划分两个类别的边界的数值是示例性的,可以进行设计变更。
68.如此,项目学习部5a、5b、5c、5d、5e对在iri、车辙深度、裂缝率、平整度、mci的值设置分类,将多个识别器进行多层化,通过输入样本数据进行机器学习,针对作为学习结束后尚未学习的数据的新数据的输入,只需求出iri、车辙深度、裂缝率、平整度、mci的值即可。如果想要细分值的分类,增加识别器即可。另外,由于项目学习部5f对有无坑槽进行判定,因此不需要将识别器多层化。
69.此外,判定部5也可以代替所述项目或在这些项目之外,判定有无车辙深度、有无裂缝、有无路面凹凸,也可以判定是否需要道路修补、以及路面特征判定装置1的操作者任意决定的项目。并且,判定部5也可以构成为对多个项目进行机器学习,但也可以按照每个设定的项目设置项目学习部。
70.如上所述,判定部5将输入数据运算部3生成的带标签的样本数据作为教师数据,对路面特征的各项目进行机器学习,并生成已学习模型(路面特征学习步骤)。并且,当机器学习完成时,判定部5针对由输入数据运算部3生成的未学习的新数据的输入,通过对照已学习模型来判定新数据属于哪个标签后再输出。即,如果是iri,则判定部5中的项目学习部5a使用机器学习后的已学习模型,针对新数据的输入,判定iri的值后输出。同样,项目学习部5b、5c、5d、5e分别输出相对应的车辙深度、裂缝率、平整度、mci的值。此外,项目学习部5f输出是否有坑槽。
71.第一实施方式中的路面特征判定装置1如上述那样构成,下面,参照图6及图7对其操作进行说明。当接收到由振动信息收集装置10收集的振动信息及车辆信息的原始数据的文件时,路面特征判定装置1将其存储在存储装置21中。
72.首先,当操作者通过输入装置22输入进行机器学习的指示时,路面特征判定装置1通过cpu20执行用于处理原始数据的程序来处理原始数据,生成样本数据(步骤s1)。具体而言,通过cpu20执行的步骤s1的处理,路面特征判定装置1根据存储有60秒钟分量的原始数据的文件生成57个样本数据。如前所述,在本实施方式中,路面特征判定装置1针对4个簧上加速度、簧下加速度以及行程位移,生成将以下的值作为特征量的样本数据,该值为最大值、最小值、平均值、中间值、标准偏差、方差、0.2hz至3hz的频带的poa值、3hz至8hz的频带的poa值、8hz至20hz的频带的poa值及15hz至30hz的频带的poa值、簧下加速度除以车辆v的速度后得到的值、以及簧下加速度的最大值除以簧下加速度的有效值后得到的值等各值。
73.接下来,路面特征判定装置1根据操作者的标签输入,将路面特征的各项目的标签
与样本数据建立关联(步骤s2)。
74.进一步地,路面特征判定装置1进行机器学习,以便将与标签建立关联的样本数据作为教师数据,对各项目进行判断(步骤s3)。具体而言,cpu20根据预定学习算法来执行机器学习处理,其中,该预定学习算法用于将与路面特征的各项目的标签建立关联的样本数据作为教师数据,并作为识别器来发挥作用。反复执行该处理,直到路面特征判定装置1进行机器学习,并且针对未学习数据的输入,能够对路面特征的各项目进行高精度判定为止。
75.如上所述,路面特征判定装置1通过样本数据的输入来结束机器学习时,针对输入数据运算部3生成的未学习的新数据的输入,用于判定路面特征的准备就绪。
76.当在前述的机器学习后由操作者通过输入装置22输入对新数据进行路面特征判定的指示时,路面特征判定装置1通过cpu20执行用于处理原始数据的程序来处理振动信息及车辆信息的原始数据,生成新数据(步骤s11)。具体而言,通过cpu20执行的步骤s11的处理,路面特征判定装置1根据存储有60秒钟分量的原始数据的文件生成57个新数据。通过cpu20执行步骤s11的处理,从振动信息的原始数据中截取预定时间3秒分量的数据,对截取的3秒分量的数据进行处理以求出新数据,并输入到判定部5中,执行重叠处理并依次求出新数据,其中,重叠处理用于使在求出前一个新数据时截取的数据与在求出下一个输入的新数据时截取的数据的一部分重复。如前所述,在本实施方式中,路面特征判定装置1针对4个簧上加速度、簧下加速度以及行程位移,生成将以下的值作为特征量的样本数据,该值为最大值、最小值、平均值、中间值、标准偏差、方差、0.2hz至3hz的频带的poa值、3hz至8hz的频带的poa值、8hz至20hz的频带的poa值及15hz至30hz的频带的poa值、簧下加速度除以车辆v的速度后得到的值、以及簧下加速度的最大值除以簧下加速度的有效值后得到的值等各值。即,新数据的特征量是与样本数据的特征量相同类型的值。
77.接下来,路面特征判定装置1针对新数据的输入,使用已学习模型对路面特征的各项目进行判定(步骤s12)。具体而言,cpu20针对新数据的输入,利用已学习模型,判定作为路面特征的各项目的iri、车辙深度、裂缝率、平整度、mci的各值以及是否有坑槽。
78.并且,路面特征判定装置1将针对路面特征的各项目求出的判定结果显示在显示装置6上(步骤s13)。此外,当通过操作者的输入装置22的操作接收到印刷判定结果的指令时,路面特征判定装置1将各项目的判定结果印刷到纸介质上。另外,即使没有操作者的指示,路面特征判定装置1也可以利用印刷装置7将判定结果印刷到纸介质上后输出。
79.关于由路面特征判定装置1判定的路面特征的各项目的判定结果,成为有助于操作者对道路进行养护的资料,并且有助于操作者判断是否需要对道路进行修补。
80.如此,本实施方式的已学习模型的生成方法将包含从车辆v行驶时检测到的振动信息中利用至少一个以上的频带来提取的数据在内的样本数据作为教师数据,通过机器学习来预先学习所述路面特征,生成已学习模型。在以这种方式构成的已学习模型的生成方法中,将与路面特征的劣化密切相关的频带内振动作为教师数据给出,由于判定部对路面特征进行机器学习并生成已学习模型,因此在机器学习后能够高精度地进行路面特征的判定。此外,已学习模型的生成方法利用与从振动信息中获得的样本数据具有相同类型的新数据来判定路面特征,因此在进行路面特征的判定处理时,不需要对扫描路面凹凸后的图像数据进行解析那样的高成本解析。因此,根据本实施方式的已学习模型的生成方法,能够以低成本高精度地进行路面特征的判定。进一步地,根据本实施方式中的已学习模型的生
成方法,能够低成本地进行路面特征的判定,因此对于一般道路或生活道路也能够简单地进行路面特征的判定。作为利用样本数据及新数据中包含的用频带提取的数据,可以是该频带的振动振幅的平均值等该频带数据中的表示该频带特征的值。进一步地,本实施方式的已学习模型的生成方法具备:振动信息收集步骤,其在车辆行驶时通过振动信息收集装置10收集振动信息;路面特征学习步骤,其将包含从振动信息中利用至少一个以上的频带来提取的数据在内的样本数据作为教师数据,路面特征判定装置1通过机器学习来预先学习路面特征,生成已学习模型。在以这种方式构成的已学习模型的生成方法中,能够通过两个装置1、10简单地生成已学习模型。
81.此外,根据本实施方式的路面特征判定装置1具有已学习模型,该已学习模型将包含从振动信息中利用至少一个以上的频带来提取的数据在内的样本数据作为教师数据,通过机器学习来预先学习路面特征而得到,并具备判定部5,该判定部用于基于所述已学习模型,对与样本数据具有相同类型的新数据的输入,进行所述路面特征的判定。在以这种方式构成的路面特征判定装置1中,将与路面特征的劣化密切相关的频带内振动作为教师数据给出,由于判定部5对路面特征进行机器学习,因此在机器学习后能够高精度地进行路面特征的判定。此外,路面特征判定装置1利用与从振动信息中获得的样本数据具有相同类型的新数据来判定路面特征,因此在进行路面特征的判定处理时,不需要对扫描路面凹凸后的图像数据进行解析那样的高成本解析。因此,根据本实施方式的路面特征判定装置1,能够以低成本高精度地进行路面特征的判定。进一步地,根据本实施方式的路面特征判定装置1,能够低成本地进行路面特征的判定,因此对于一般道路或生活道路也能够简单地进行路面特征的判定。作为利用样本数据及新数据中包含的用频带提取的数据,可以是该频带的振动振幅的平均值等该频带数据中的表示该频带特征的值。
82.此外,为了对路面特征进行判定,还有搭乘正在行驶中的车辆的检查员进行体感评价或与iri建立关联的照片进行比较来进行目视评价等方法,但也有可能忽略微小的裂痕或坑槽,从而难以准确地判定iri,另外对管理区域内的所有的一般道路或生活道路进行这样的感官试验需要花费大量的时间和人力。与此相对,在根据本实施方式的已学习模型的生成方法及路面特征判定装置1中,由于不需要检查员的目视作业,因此人员负担少,能够以低成本判定路面特征,因此也能够灵活应用于一般道路或生活道路的路面特征的判定。
83.另外,如前所述,判定部5将样本数据作为教师数据进行机器学习,对路面特征进行学习后,对未学习的新数据进行路面特征的判定,为了对未学习的新数据进行路面特征的判定而使用的已学习的模型,通过反复进行基于预先编程的学习算法的处理的机器学习而生成。以这种方式生成的已学习模型可以作为程序移植到没有学习功能的计算机系统中。因此,路面特征判定装置1中的判定部5虽然不具备学习功能,但可以构成为具有已学习模型,该已学习模型将包含从振动信息中利用至少一个以上的频带来提取的数据在内的样本数据作为教师数据,通过机器学习而生成,基于已学习模型针对与样本数据相同类型的新数据的输入,进行路面特征的判定。
84.此外,在本实施方式中,作为特征量,样本数据包括从振动信息中提取出的使搭乘者感觉到轻飘飘的从0.2hz至3hz的频带内振动、使搭乘者感觉到凹凸不平的从3hz到8hz的频带内振动、使搭乘者感觉到咯噔咯噔的从8hz到20hz的频带内振动、使搭乘者感觉到异响
的从15hz到30hz的频带内振动、使搭乘者感觉到晃动的16hz附近的频带内振动、使搭乘者感觉到颠簸的5hz附近的频带内振动,因此可以通过覆盖给搭乘者带来不适感的频带,进行路面特征的判定。另外,例如,如果想要进行仅着眼于感觉到轻飘飘的从0.2hz至3hz的频带内振动的路面特征的判定,则也可以使判定部5将仅根据0.2hz至3hz的频带内振动得到的特征量作为样本数据进行机器学习。如此一来,也可以任意选择操作者想要评价的频带来使判定部5进行机器学习,在这种情况下,即使对于新数据,只要将其作为仅根据与样本数据相对应的频带内振动得到的特征量提供给判定部5即可。
85.此外,根据本实施方式的路面特征判定装置1中的判定部5具备仅对与用于表示路面特征的多个项目中的每一个相对应的项目的路面特征进行机器学习的多个项目学习部5a、5b、5c、5d、5e、5f,并且项目学习部5a、5b、5c、5d、5e、5f仅对与新数据的输入相对应的项目判定路面特征。根据以这种方式构成的路面特征判定装置1,由于具备项目学习部5a、5b、5c、5d、5e、5f,因此能够按照路面特征的每个项目进行高精度的判定,其中,该项目学习部专门针对与以不同尺度表示路面特征的每个项目相对应的项目进行机器学习及判定。
86.另外,作为振动信息而得到的加速度和行程位移是时间轴波形,在生成样本数据及新数据时,在完全不分割时间的情况下,虽然很容易地进行整体的路面特征的判定,但却是难以识别坑槽的数据,因此需要将振动信息按照细分后的时间进行分割,并得到用于评价路面特征的数据。本实施方式中的输入数据运算部3根据60秒内的振动信息,从每3秒的振动信息的原始数据中得到样本数据及新数据,但在不进行前述的重叠处理的情况下,虽然能够掌握每个时间段的路面特征,但缺少对时间进行分割的接缝附近的信息。与此相对,本实施方式的路面特征判定装置1具备用于从振动信息的原始数据中截取预定时间量的数据,对截取的预定时间量的数据进行处理以求出新数据,并输入到判定部5中的输入数据运算部3,输入数据运算部3执行重叠处理并依次求出所述新数据,其中,重叠处理用于使在求出前一个新数据时截取的数据与在求出下一个输入的新数据时截取的数据的一部分重复。如此一来,路面特征判定装置1由于进行重叠处理,因此能够掌握每个时间区间的路面特征,并且利用即便是时间分割线附近处信息也没有缺少的样本数据和新数据来进行机器学习和判定,因此能够高精度地判定路面特征。此外,由于将划分时间的预定时间设定为3秒,因此对车辆v的乘坐舒适性产生影响的低频成分的数据也能够包含在样本数据以及新数据中,并且也能够正确地判定对低频的乘坐舒适性产生影响的路面特征。
87.进一步地,在本实施方式的路面特征判定装置1中,样本数据及新数据包含利用至少一个以上的频带提取出的局部振动总量值。根据以这种方式构成的路面特征判定装置1,由于将明确表示所述频带内振动强度的值、即与路面特征的关联度较强的局部振动总量值作为特征量包含在样本数据及新数据中,因此判定部5对路面特征的判定精度得以提高。
88.此外,在本实施方式中的路面特征判定装置1中,由于振动信息包含车辆v的簧上部件的加速度,因此能够使用与车辆v的乘坐舒适性直接相关的簧上加速度来判定路面特征,并且能够根据车辆v的乘坐舒适性的观点进行路面特征的判定。
89.进一步地,在本实施方式的路面特征判定装置1中,样本数据及新数据包含车辆v的簧下加速度的最大值除以簧下加速度的有效值后得到的值。簧下加速度除以车辆v的速度后得到的值是减轻了车辆v在路面上行驶时的速度的影响的值。因此,根据路面特征判定装置1,该路面特征判定装置构成为将簧下加速度除以车辆v的速度后得到的值作为样本数
据及新数据来对路面特征进行机器学习及判定,无论车辆的行驶速度如何,都能够高精度地判定路面特征。
90.此外,在本实施方式的路面特征判定装置1中,样本数据及新数据包含车辆v的簧下加速度的最大值除以簧下加速度的有效值后得到的值。当车辆v经过坑槽等一处损坏部位的情况下,由于车辆v的簧下部分发生大幅度振动,因此簧下加速度的最大值增大,但作为经过一定时间的有效值来看,该值不会增大。与此相对,当车辆v在粗糙路面上持续行驶的情况下,簧下加速度的最大值和有效值都增大。由此,将簧下加速度的最大值除以簧下加速度的有效值后得到的值设为用于表示路面是整体粗糙还是局部粗糙的指标。因此,根据路面特征判定装置1,该路面特征判定装置构成为将簧下加速度的最大值除以簧下加速度的有效值后得到的值作为样本数据及新数据来对路面特征进行机器学习及判定,能够更准确地掌握路面是整体粗糙还是局部粗糙的路面特征,并且能够高精度地判定路面特征。
91.进一步地,在本实施方式的路面特征判定装置1中,样本数据及新数据包含车辆v的簧上部件的最高值、平均值、中间值、最低值、方差及标准偏差。根据以这种方式构成的路面特征判定装置1,能够使用代表簧上部件的振动信息的指标对路面特征进行机器学习及判定。
92.此外,如图1所示的第一实施方式中的路面特征判定装置1那样,也可以具备判断新数据是否是异常数据的判断部8。判断部8通过cpu20执行判断部8的处理程序来实现。判断部8根据将同一标签的各个样本数据的平均值作为坐标的基准点、以及被判定为属于同一标签的新数据,来判断该新数据是否异常。具体而言,当样本数据中包含的特征量的数据数为n个时,判断部8用于机器学习,对同一项目添加了相同标签的所有样本数据,按照n个特征量中的每一个来计算平均值。判断部8在将n个特征量分别作为轴的n维坐标系中,将以求出的n个平均值作为集合时的坐标作为基准点,求出从该基准点到在n维坐标系中所示的各样本数据的n维坐标系中的坐标之间的距离。例如,当样本数据中包含的特征量的数据是簧上部件的加速度的最高值、标准偏差以及一个poa值这三个数据,并且各个值的平均值是10、0.15以及6.6的情况下,在以最高值、标准偏差以及poa值为轴的三轴坐标系中,将集合(10,0.15,6.6)的坐标作为基准点。只需求出从该基准点的坐标(10,0.15,6.6)到将各样本数据的最高值、标准偏差以及一个poa值作为集合的坐标之间的距离即可。
93.并且,判断部8求出从基准点到各样本数据之间的距离的平均值、和表示从基准点到各样本数据之间的距离的偏差的标准偏差。
94.如此,判断部8根据分别对路面特征的各项目赋予了同一标签的样本数据来求出基准点、距离的平均值以及标准偏差。即,如果以1m/km的刻度向iri赋予最多5m/km的iri标签的情况为例,则判断部8对向每个iri值赋予相同标签的所有样本数据求出基准点,从而求出iri值为1m/km、2m/km、3m/km、4m/km、5m/km时的5个标签中的每一个的基准点、距离的平均值以及标准偏差。
95.并且,当通过判定部5判定新数据的iri的判定结果为3m/km以上且小于4m/km时,求出同一标签的样本数据组的基准点与新数据在n维坐标系中的坐标之间的距离。判断部8求出新数据的距离与同一标签的样本数据组的距离的平均值之差,当该差值的绝对值超过同一标签的样本数据组的距离的标准偏差的3倍的情况下,判断为新数据异常;当所述差值的绝对值为同一标签的样本数据组的距离的标准偏差的3倍以下的情况下,判断为新数据
正常。当假设样本数据组及新数据遵循正态分布的情况下,所述差值的绝对值应该会以97%的概率进入同一标签的样本数据组的距离的标准偏差的3倍以内的范围,因此偏离该范围的新数据有可能是特殊数据。因此,判断部8进行如前所述那样的判断,判断新数据是否异常。另外,如上所述,作为将新数据作为异常数据进行处理时的基准,将所述差值的绝对值为同一标签的样本数据组的距离的标准偏差的3倍以上的情况作为数据以上进行处理,但该基准可以任意设定。
96.将判断部8的判断结果显示在显示装置6上,并根据操作者的要求由印刷装置7印刷在纸介质上。通过判断部8判断新数据存在异常的判断结果,是用于表明项目学习部的机器学习不充分、或者路面特征项目需要新标签的指标。因此,参照了判断部8的判断结果的路面特征判定装置1的操作者能够注意到判定部5再次进行机器学习的必要性或赋予新标签的必要性。操作者可以将再次新收集的样本数据作为教师数据提供给路面特征判定装置1,使路面特征判定装置1进行机器学习。如此一来,具备判断部8的路面特征判定装置1能够向路面特征判定装置1的操作者提示判定部5再次进行机器学习的必要性和新标签的必要性。
97.《第二实施方式》进一步地,输入数据运算部3除了如前所述那样地计算作为样本数据及新数据的特征量之外,还可以按照得到这些特征量时的车辆v的每个行驶条件来分开处理样本数据及新数据。具体而言,输入数据运算部3参照车辆信息文件,掌握获得振动信息时的车辆v的速度,与车辆v所设定的速度阈值进行比较,当获得振动信息时的速度为阈值以上的情况下,将从该振动信息获得的样本数据及新数据作为高速行驶时的数据进行处理。此外,输入数据运算部3与车辆v所设定的速度阈值进行比较,当获得振动信息时的速度小于阈值的情况下,将从该振动信息获得的样本数据及新数据作为低速行驶时的数据进行处理。另外,所设定的速度阈值可以任意设定,例如为40km/h等。进一步地,输入数据运算部3参照车辆信息文件,掌握获得振动信息时的车辆v的雨刷器的驱动状况,当获得振动信息时正在驱动刮水器的情况下,将根据该振动信息获得的样本数据及新数据作为降雨时的数据进行处理;反之,当获得振动信息时未驱动雨刷器的情况下,将从该振动信息获得的样本数据及新数据作为晴天时的数据进行处理。如此一来,输入数据运算部3将车辆v行驶的速度以及天气作为行驶条件,按照每个条件来分开处理样本数据及新数据。因此,输入数据运算部3为了按照高速/晴天时、高速/降雨时、低速/晴天时以及低速/降雨时这4个行驶条件来分开处理样本数据及新数据,将行驶条件的信息与样本数据及新数据建立关联。
98.另一方面,判定部5的项目学习部5a如图8所示的第二实施方式中的路面特征判定装置1a那样,与所述4个行驶条件相对应地分别具备4个按行驶条件分类的学习部5a1、5a2、5a3、5a4。按行驶条件分类的学习部5a1通过高速/晴天时的样本数据进行机器学习,并对高速/晴天时的新数据进行路面特征的判定。按行驶条件分类的学习部5a2通过高速/降雨时的样本数据进行机器学习,并对高速/降雨时的新数据进行路面特征的判定。按行驶条件分类的学习部5a3通过低速/晴天时的样本数据进行机器学习,并对低速/晴天时的新数据进行路面特征的判定。按行驶条件分类的学习部5a4通过低速/降雨时的样本数据进行机器学习,并对低速/降雨时的新数据进行路面特征的判定。即,按行驶条件分类的学习部5a1、5a2、5a3、5a4对于作为路面特征的同一项目的iri的值,仅将与相对应的行驶条件建立关联
的样本数据作为教师数据进行机器学习,仅对与相对应的行驶条件建立关联的新数据进行判定。另外,如前所述,设定了4个行驶条件,并设置了4个按行驶条件分类的学习部,但在将行驶条件设为高速和低速这2个、或者雨天和晴天这2个的情况下,项目学习部5a也可以具备相对应的2个按行驶条件分类的学习部。此外,在行驶条件为5个以上的情况下,项目学习部5a只要与之对应地具备5个按行驶条件分类的学习部即可。如此,项目学习部5a只要根据行驶条件的设定数量,与其对应地具备相应数量的按行驶条件分类的学习部即可。
99.按行驶条件分类的学习部5a1、5a2、5a3、5a4是具有与第一实施方式中的项目学习部5a相同的结构的识别器。因此,按行驶条件分类的学习部5a1、5a2、5a3、5a4在机器学习以及对新数据的判定处理方面执行相同的处理,仅仅只是所提供的教师数据因每个行驶条件的不同而不同。因此,按行驶条件分类的学习部5a1通过机器学习生成专门用于判定高速/晴天时的iri的已学习模型,并且对高速/晴天时的新数据的iri进行判定。按行驶条件分类的学习部5a2通过机器学习生成专门用于判定高速/降雨时的iri的已学习模型,并且对高速/降雨时的新数据的iri进行判定。按行驶条件分类的学习部5a3通过机器学习生成专门用于判定低速/晴天时的iri的已学习模型,并且对低速/晴天时的新数据的iri进行判定。按行驶条件分类的学习部5a4通过机器学习生成专门用于判定低速/降雨时的iri的已学习模型,并且对低速/降雨时的新数据的iri进行判定。
100.判定部5的其他项目学习部5b、5c、5d、5e、5f也与项目学习部5a同样地具备与4个行驶条件相对应的按行驶条件分类的学习部5b1、5b2、5b3、5b4、5c1、5c2 5f3、5f4。按行驶条件分类的学习部5b1、5b2、5b3、5b4、5c1、5c2 5f3、5f4也是具有与对应的第一实施方式中的项目学习部5b、5c、5d、5e、5f相同的结构的识别器。按行驶条件分类的学习部5b1、5b2、5b3、5b4、5c1、5c2 5f3、5f4与按行驶条件分类的学习部5a1、5a2、5a3、5a4相同,对于各自对应的路面特征项目,仅将与对应的行驶条件建立关联的样本数据作为教师数据进行机器学习,仅对与对应的行驶条件建立关联的新数据进行判定。
101.另外,按行驶条件分类的学习部5a1、5a2、5a3、5a4、5b1、5b2
…
5f3,5f4在本实施方式的路面特征判定装置1a中用作识别器,但也可以用作使用了反向传播或id3这样的学习算法的机器学习模型。
102.如上所述,判定部5将与输入数据运算部3生成的行驶条件建立关联的带标签的样本数据作为教师数据,按照每个形驶条件对路面特征的各项目进行机器学习,并按照每个项目以及每个行驶条件生成已学习模型。并且,当机器学习完成时,判定部5针对由输入数据运算部3生成的未学习的新数据的输入,通过对照已学习模型来判定新数据属于哪个标签后再输出。例如,如果是高速/降雨时的iri,项目学习部5a的按行驶条件分类的学习部5a2使用机器学习后的已学习模型,针对新数据的输入,判定iri的值后输出。同样地,在项目学习部5b、5c、5d、5e、5f中,对于各自对应的车辙深度、裂缝率、平整度、mci的值,由与行驶条件相匹配的按行驶条件分类的学习部接收新数据的输入,并将判定结果输出至显示装置6上。路面特征判定装置1a也可以利用印刷装置7将判定结果印刷到纸介质上后输出。另外,关于新数据,可以将其输入到所有的按行驶条件分类的学习部5a1、5a2、5a3、5a4、5b1、5b2 5f3、5f4中,也可以由所有的按行驶条件分类的学习部5a1、5a2、5a3、5a4、5b1、5b2 5f3、5f4对同一新数据进行判定。并且,路面特征装置1a可以将所有的判定结果输出到显示装置6上,也可以通过印刷装置7将判定结果印刷到纸介质上后输出。在这种情况下,路面特
征判定装置1a的操作者在掌握了新数据是在哪种行驶条件下得到的基础上,只要从由各项目学习部5a、5b、5c、5d、5e、5f分别输出的关于同一项目的各4个判定结果中选择适当的判定结果来掌握路面特征即可。
103.在以这种方式构成的路面特征判定装置1a中,项目学习部5a、5b、5c、5d、5e、5f具备多个按行驶条件分类的学习部5a1、5a2、5a3、5a4、5b1、5b2 5f3、5f4,该按行驶条件学习部与车辆v的每个行驶条件相对应,并按照对应的每个行驶条件对路面特征进行机器学习。根据以这种方式构成的路面特征判定装置1a,按表示路面特征的每个项目进行符合行驶条件的机器学习及判定,因此即使行驶条件不同也能够按路面特征的每个项目进行高精度的判定。另外,如前所述,行驶条件为车辆v的速度、行驶时的天气,但也可以是是否为坡道、转弯时和直行时的区别、加速时/减速时以及等速时的区别等。
104.上面已经详细说明了本发明的优选实施方式,但只要不脱离权利要求的范围,可以进行改造、变形及变更。符号说明
105.1、1a 路面特征判定装置3 输入数据运算部4 数据库5 判定部5a、5b、5c、5d、5e、5f 项目学习部5a1、5a2、5a3、5a4、5b1、5b2、5b3、5b4、5c1、5c2、5c3、5c4、5d1、5d2、5d3、5d4、5e1、5e2、5e3、5e4、5f1、5f2、5f3、5f4 按行驶条件分类的学习部8 判断部20 cpu21 存储装置22 输入装置
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1