一种基于全智能控制的高速清扫车
1.本发明涉及一种公路清扫车,具体涉及一种基于全智能控制的高速清扫车。
背景技术:
2.随着当前生态环境意识的逐渐增强,城市道路中的清扫车大量推广,技术已经比较成熟且完善。在高速公路或城市快速路上,掉落的物品及其垃圾不但对环境造成污染,还存在较大安全隐患。
3.目前,高速路或城市快速路上的清扫车处于起步阶段,自动化水平不够高,对各部分只是单独控制,没有反馈信号,线路比较复杂,给安装、调试、维护维修带来困难;同时,传统控制方法没有对各个部分进行信号集中采集,没有信息反馈,所以都是采取的是开环控制,技术不够完善和成熟。在高速公路进行清扫,由于路途远、速度快,还要清理大件物品,连续工作距离远,所以对车辆的要求更高,可靠性、安全操作性应该更有保障。
技术实现要素:
4.为解决上述问题,本发明提供了一种基于全智能控制的高速清扫车。
5.为实现上述目的,本发明采取的技术方案为:
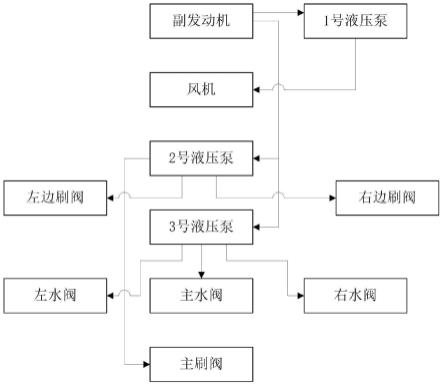
6.一种基于全智能控制的高速清扫车,包括副发动机,还包括:
7.用于带动风机的1号液压泵;
8.用于带动主刷、左刷、右刷、及垃圾箱门的2号液压泵;
9.用于为喷水提供动力的3号液压泵;
10.副发动机带动1号液压泵、2号液压泵、3号液压泵工作,分别为清扫车的各部分动作机构提供动力;
11.主刷、左刷、右刷配置的一个或一排水嘴,均采用单独控制。
12.作为本方案的进一步地设计,采用全自动智能闭环控制,包括:
13.发动机信号接入模块,用于接入主发动机和副发动机的工况;比如油量、油温、速度等;
14.液压泵信号接入模块,用于接入各液压泵的工况;
15.操作面板,用于实现液压泵、水阀等手动、半自动和全自动控制模式的选择,显示主发动机、副发动机、液压泵的工况;
16.异常监测模块,用于实现主发动机工况、副发动机工况、各液压泵工况内载异常工况的监测;线路运行过程一般分为三种状态:即正常运行、异常和故障。根据对检测出来的参数,程序能够自动识别并且能自动做出处理:如果线路是正常运行,需继续监视;对异常这种小毛病,采取的是警示和延时保护的措施;而对于故障这类大问题,需要立即断电保护并报警。
17.作为本方案的进一步地设计,主刷采用2500mm宽,直径50cm的滚刷,左刷的直径在1m-1.1m,共设计两个,右刷的直径在1m-1.1m,共设计两个。
18.作为本方案的进一步地设计,操作面板上,能够对油门和液压泵采用模拟量控制,即通过按键,使发动机的速度连续的增或减,使液压泵的力量大或小。
19.作为本方案的进一步地设计,手动操作,可以通过驾驶室的触摸屏或车身上的远程操作柜,两种控制模式。
20.作为本方案的进一步地设计,清扫车的四周安装有多个红外线传感器,车辆工作过程中,道路两侧如果有障碍,就会启动半自动程序,收回障碍测的清扫装置,实现避险,过去故障点,清扫装置自动回位进行工作。
21.与现有技术相比,本发明采用智能控制,能实现全方位监视,全自动控制,全面保护,操作更加便捷,功能更加完善,可靠性高。
附图说明
22.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
23.图1为本发明实施例一种基于全智能控制的高速清扫车的工作原理图。
24.图2为本发明实施例中操作面板的示意图。
25.图3为图2的俯视图。
26.图4图2的左侧图。
27.图5为本发明实施例中的可编程控制器的外观图。
28.图6为本发明一部分的输入信号示意图。
29.图7为本发明另一部分的输入信号示意图。
30.图8为本发明的输出信号示意图。
具体实施方式
31.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
32.如图1-图8所示,一种基于全智能控制的高速清扫车,包括副发动机,还包括:用于带动风机的1号液压泵;用于带动主刷、左刷、右刷、及垃圾箱门的2号液压泵;其中,主刷采用2500mm宽,直径50cm的滚刷,左刷的直径在1m-1.1m,共设计两个,右刷的直径在1m-1.1m,共设计两个;用于为喷水提供动力的3号液压泵;副发动机带动1号液压泵、2号液压泵、3号液压泵工作,分别为清扫车的各部分动作机构提供动力;主刷、左刷、右刷配置的一个或一排水嘴,均采用单独控制。
33.本发明的高速清扫车采用plc全自动智能闭环控制,包括:发动机信号接入模块,用于接入主发动机和副发动机的工况;比如油量、油温、速度等;液压泵信号接入模块,用于接入各液压泵的工况;操作面板,用于实现液压泵、水阀等手动、半自动和全自动控制模式的选择,其中,手动操作,可以通过驾驶室的触摸屏或车身上的远程操作柜,两种控制模式;用于显示主发动机、副发动机、液压泵的工况;异常监测模块,用于实现主发动机工况、副发动机工况、各液压泵工况内载异常工况的监测;线路运行过程一般分为三种状态:即正常运
行、异常和故障。根据对检测出来的参数,程序能够自动识别并且能自动做出处理:如果线路是正常运行,需继续监视;对异常这种小毛病,采取的是警示和延时保护的措施;而对于故障这类大问题,需要立即断电保护并报警。比如油温过高、油量不足等就会发出警报,程度严重时,还会停机。这些参数值,都可以通过触摸屏进行设定和修改。
34.本实施例中,清扫车的四周安装有多个红外线传感器,车辆工作过程中,道路两侧如果有障碍,就会启动半自动程序,收回障碍测的清扫装置,实现避险,过去故障点,清扫装置自动回位进行工作。
35.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。
技术特征:
1.一种基于全智能控制的高速清扫车,包括副发动机,其特征在于:还包括:用于带动风机的1号液压泵;用于带动主刷、左刷、右刷、及垃圾箱门的2号液压泵;用于为喷水提供动力的3号液压泵;副发动机带动1号液压泵、2号液压泵、3号液压泵工作,分别为清扫车的各部分动作机构提供动力;主刷、左刷、右刷配置的一个或一排水嘴,均采用单独控制。2.如权利要求1所述的一种基于全智能控制的高速清扫车,其特征在于:主刷采用2500mm宽,直径50cm的滚刷,左刷的直径在1m-1.1m,共设计两个,右刷的直径在1m-1.1m,共设计两个。3.如权利要求1所述的一种基于全智能控制的高速清扫车,其特征在于:采用全自动智能闭环控制,包括:发动机信号接入模块,用于接入主发动机和副发动机的工况;液压泵信号接入模块,用于接入各液压泵的工况;操作面板,用于实现液压泵、水阀手动、半自动和全自动控制模式的选择,显示主发动机、副发动机、液压泵的工况;异常监测模块,用于实现主发动机工况、副发动机工况、各液压泵工况内载异常工况的监测。4.如权利要求1所述的一种基于全智能控制的高速清扫车,其特征在于:操作面板上,能够对油门和液压泵采用模拟量控制,即通过按键,使发动机的速度连续的增或减,使液压泵的力量大或小。5.如权利要求1所述的一种基于全智能控制的高速清扫车,其特征在于:手动操作,可以通过驾驶室的触摸屏或车身上的远程操作柜,两种控制模式。6.如权利要求1所述的一种基于全智能控制的高速清扫车,其特征在于:清扫车的四周安装有多个红外线传感器,车辆工作过程中,道路两侧如果有障碍,就会启动半自动程序,收回障碍测的清扫装置,实现避险,过去故障点,清扫装置自动回位进行工作。
技术总结
本发明涉及一种公路清扫车,具体涉及一种基于全智能控制的高速清扫车,采用全自动智能闭环控制,包括副发动机,还包括:用于带动风机的1号液压泵;用于带动主刷、左刷、右刷、及垃圾箱门的2号液压泵;用于为喷水提供动力的3号液压泵;副发动机带动1号液压泵、2号液压泵、3号液压泵工作,分别为清扫车的各部分动作机构提供动力;主刷、左刷、右刷配置的一个或一排水嘴,均采用单独控制。本发明采用智能控制,能实现全方位监视,全自动控制,全面保护,操作更加便捷,功能更加完善,可靠性高。可靠性高。可靠性高。
技术研发人员:田国辉 郭世豪 施政伟 刘胜飞 霍佳漩 赵明双 李金豪 王伟 王璐 张丹凯 陈琪 任建科
受保护的技术使用者:邢台技师学院
技术研发日:2022.05.20
技术公布日:2022/8/12
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1