一种波形钢腹板精准定位装置的制作方法
1.本发明涉及桥梁施工技术领域,特别涉及一种波形钢腹板精准定位装置。
背景技术:
2.现有技术中,波形钢腹板的作用是作为预应力混凝土箱形梁桥的施工替代,其优势在于桥梁结构为预应力混凝土连续箱梁结合上承式钢筋混凝土箱结构后能够适应大跨度、长距离的桥梁施工项目,并且波形钢板剪切屈曲强度高于平钢板的性能优势,尤其适应与其他桥梁施工构建进行组合结构施工;而现有施工方式中,波形钢腹板的布置方式包括垂直和倾斜布置,以适应施工项目的需求,而对于涉及组合施工的确定定位的方式中,一般单独针对垂直布置的方式,而对于倾斜布置的方式定位施工需要架设大量的定位杆和定位梁,对于施工的校准一般也依据实际情况进行单独设计,目前现有技术没有给出更加通用的、适应性更加普遍的精准定位的方式。
技术实现要素:
3.本发明要解决现有技术中的上述技术问题,提供一种波形钢腹板精准定位装置。
4.为了解决上述技术问题,本发明的技术方案具体如下:
5.一种波形钢腹板精准定位装置,包括:
6.施工模板,在施工桥梁底板的两侧分别布置所述施工模板,使得相对于所述桥梁底板中心对称的相对布置所述施工模板呈敞开状;
7.所述施工模板具有平行于所述施工桥梁底板的展翼部和向所述施工桥梁底板方向延伸的支撑壁面;
8.所述展翼部的下方能够搭建辅助施工脚手架;
9.波形钢腹板能够贴合在所述支撑壁面上,且所述波形钢腹板的第一端能够支撑在一限位结构上;
10.相对的所述波形钢腹板之间能够预制连接铰链支撑机构,所述支撑机构用于调节相对的所述波形钢腹板之间的距离;
11.定位机构,其布置在一组施工模板的所述展翼部上,且能够沿着所述施工模板横向方向移动,所述定位机构具有一组定位端,所述定位端能够向所述波形钢腹板第一端的翼缘方向移动一预设距离,且当所述定位端与所述翼缘接触时,能够从一个定位点变化为两个定位点,且两个所述定位点能够位于所述翼缘的中心线上。
12.优选地,所述波形钢腹板的放置方式为:所述波形钢腹板与所述限位结构垂直,所述波形钢腹板的下翼缘能够卡在所述限位结构上。
13.优选地,所述波形钢腹板的放置方式为:所述波形钢腹板与所述限位结构保持一倾斜角度,所述波形钢腹板的下翼缘能够卡在所述限位结构上。
14.优选地,所述限位结构包括:
15.凸起端,其能够抵接在所述下翼缘内;
16.支撑端,其连接在所述凸起端的下方,且其能够可拆卸的安装在所述施工桥梁底板上,并与所述支撑壁面相邻布置。
17.优选地,所述限位结构包括:
18.凸起端,其能够抵接在所述下翼缘内;
19.支撑端,其能够可拆卸的安装在所述施工桥梁底板上,并与所述支撑壁面相邻布置;
20.所述凸起端具有一预设倾斜角度,该预设倾斜角度与所述支撑壁面的倾斜角度相同;
21.所述凸起端连接在一支撑部件上,所述支撑部件具有一在倾斜方向的延伸部,所述延伸部上设置有多个定位螺孔,所述定位螺孔内能够穿入定位螺栓。
22.优选地,所述铰链支撑机构包括:
23.呈十字交叉铰链连接的两个铰链杆;
24.每个所述铰链杆包括:
25.主杆体;
26.所述主杆体的第一端能够设置一内管;
27.所述内管上设置有弧形滑道;
28.锁扣部,其设置在所述主杆体的第一端,且所述锁扣部
29.上可转动的设置有一拨动限位件;
30.所述锁扣部连通所述主杆体的径向,并与所述弧形滑道之间形成有一限位空间,所述限位空间内布置一半圆柱件,所述半圆柱件的两端为被限位在所述锁扣部内;
31.拨动限位件的拨动轴偏心的设置在所述锁扣部上,以使得其在锁定状态时拨动轴压合所述半圆柱件,以使得所述主杆体和所述内管能够形成锁定。
32.优选地,所述主杆体的第二端能够固定连接在所述施工桥梁底板上;
33.所述内管的第一端设置有一第一转动铰链,所述第一转动铰链上设置有锁环,所述锁环能够预制连接在所述波形钢腹板的连接节点上;
34.主杆体的中部设置有铰链孔,所述铰链孔内连接有铰链轴。
35.优选地,所述波形钢腹板朝向所述辅助施工脚手架的一侧能够连接调整环,所述调整环上能够预制连接钢丝拉绳,以使得通过预先布置在所述辅助施工脚手架方向的电动葫芦能够拉动所述钢丝拉绳。
36.优选地,所述定位机构包括:
37.在所述展翼部上方预制安装有轨道,所述轨道沿着所述展翼部的长度方向布置;
38.所述轨道上柜接有工作车;
39.所述工作车具有固定板,所述展翼部上设置有锁定孔;
40.锁定螺柱,其能够螺接在所述固定板、以及对应的锁定孔上,以使得所述工作车能够被锁定在预设位置与所述展翼部保持固定。
41.优选地,每个所述定位机构还包括两个定位组件,所述定位组件包括:
42.固定连接在所述固定板上方的定位部;
43.所述定位部的一侧设置有第一工作气缸和第二工作气缸;
44.在极限状态下,所述第一工作气缸和所述第二工作气缸呈三角形布置,且二者的
输出端的延长线相交;
45.其中,所述第二工作气缸倾斜布置;
46.所述第一工作气缸和所述第二工作气缸的输出端分别转动连接在一气缸连接板上;
47.定位气缸,其一侧固定在所述气缸连接板上;
48.所述定位气缸的第一端连接有定位壳体;
49.所述定位壳体的两侧和下端敞开;
50.所述定位壳体内转动连接有定位滚轮组件;
51.所述定位滚轮组件包括:
52.带有扭簧的滚轮轴,其转动连接在所述定位壳体上;
53.第一连接轴臂和第二连接轴臂,连接在所述滚轮轴上;
54.所述第一连接轴臂和所述第二连接轴臂呈度布置,且在预制状态下,所述第一连接轴臂与预制轴线形成度夹角,所述第二连接轴臂与所述预制轴线形成度夹角;
55.所述第一连接轴臂和所述第二连接轴臂在远离所述滚轮轴的端部连接有具有充气胎的、可转动的滚轮部。
56.本发明具有以下的有益效果:
57.本技术方案的优势在于,在精准定位的适用范围适应的波形钢腹板的布置方式更加灵活,尤其使得在面临组合施工的或者与其他顶部结构结合施工因布置角度调整的情况。
附图说明
58.下面结合附图和具体实施方式对本发明作进一步详细说明。
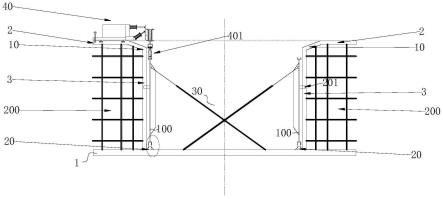
59.图1为本发明的实施例1的结构示意图;
60.图2为本发明的实施例2的结构示意图;
61.图3为本发明的实施例1的限位结构的结构示意图;
62.图4为本发明的实施例2的限位结构的结构示意图;
63.图5为本发明的铰链支撑机构的布置方式;
64.图6为本发明的铰链支撑机构的的伸缩方式;
65.图7为本发明的实施例2中定位机构的结构示意图;
66.图8为本发明的定位机构的结构示意图。
67.图中的附图标记表示为:
68.施工模板10、施工桥梁底板1、展翼部2、支撑壁面3、波形钢腹板100;
69.限位结构20、所述支撑机构30、定位机构40、定位端401;
70.凸起端21、支撑端22、支撑部件23、延伸部24;
71.铰链支撑机构30、铰链杆300;
72.主杆体310、内管320、弧形滑道321、锁扣部330、拨动限位件331、半圆柱件332、锁环341、铰链轴351;
73.调整环201、轨道410、工作车420、锁定螺柱423、定位部430;
74.第一工作气缸431、所述第二工作气缸432;
75.定位气缸440、气缸连接板433;
76.定位壳体441;
77.滚轮轴451、第一连接轴臂461、第二连接轴臂462;
78.滚轮部470。
具体实施方式
79.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围;需要说明的是,本技术中为了便于描述,以当前视图中“左侧”为“第一端”,“右侧”为“第二端”,“上侧”为“第一端”,“下侧”为“第二端”,如此描述的目的在于清楚的表达该技术方案,不应当理解为对本技术技术方案的不当限定。
80.本技术方案的设计构思是需要适应波纹钢腹板两种布置方式的类型,另外的目的在于完成更加精准的配准定位,具体的技术构思为,请参阅图1、2所示,该波形钢腹板精准定位装置,包括:施工模板10,在施工桥梁底板1的两侧分别布置施工模板10,使得相对于桥梁底板1中心对称的相对布置施工模板10呈敞开状;施工模板10相当于在施工前的预制模块,在完成浇筑后,随之会被拆除,而本设计方案中,施工模板10具有平行于施工桥梁底板1的展翼部2和向施工桥梁底板1方向延伸的支撑壁面3;展翼部2的下方能够搭建辅助施工脚手架200;支撑壁面3作为波纹钢腹板吊装施工后的粗定位,因为该支撑壁面3垂直度、倾斜度是预制时搭建的,其仅仅作为预定位的构建,而在实际的施工中,垂直度和倾斜度难以精准把控,但是展翼部2的平行度是施工中更加容易控制的技术指标,进一步地,粗定位中,波形钢腹板100能够贴合在支撑壁面3上,且波形钢腹板100的第一端能够支撑在一限位结构20上;相对的波形钢腹板100之间能够预制连接铰链支撑机构30,铰链支撑机构30用于调节相对的波形钢腹板100之间的距离;铰链支撑机构30使得两侧的波形钢腹板100之间能够产生调整时的联动;
81.具体地,通过定位机构40,定位机构40布置在一组施工模板10的展翼部2上,且能够沿着施工模板10横向方向移动,定位机构40具有一组定位端401,定位端401能够向波形钢腹板100第一端的翼缘方向移动一预设距离,且当定位端401与翼缘接触时,能够从一个定位点变化为两个定位点,且两个定位点能够位于翼缘的中心线上;定位机构40是精准调整的核心,具体通过配置气缸来完成定位点的配准,然后再通过吊装或者拉绳进行校准,而定位机构40对波形钢腹板100和其铰链支撑机构30连接的波形钢腹板100调整过程使得定位机构40仅需要布置在一侧的展翼部2上,通过铰链支撑机构30的联动调整,可确认两侧的波纹钢腹板100的定位情况。
82.在一个具体地实施例1中,以垂直布置为例,具体为附图1,波形钢腹板100的放置方式为:波形钢腹板100与限位结构20垂直,波形钢腹板100的下翼缘能够卡在限位结构20上。
83.在另一个具体地实施例2中,以倾斜布置为例,具体为附图2,波形钢腹板100的放置方式为:波形钢腹板100与限位结构20保持一倾斜角度,波形钢腹板100的下翼缘能够卡在限位结构20上。
84.实施例1中,请参阅图3所示,限位结构20包括:凸起端21,其能够抵接在下翼缘内;支撑端22,其连接在凸起端21的下方,且其能够可拆卸的安装在施工桥梁底板1上,并与支撑壁面3相邻布置。
85.实施例2中,请参阅图4所示,限位结构20包括:凸起端21,其能够抵接在下翼缘内;支撑端22,其能够可拆卸的安装在施工桥梁底板1上,并与所述支撑壁面3相邻布置;凸起端21具有一预设倾斜角度,该预设倾斜角度与支撑壁面的倾斜角度相同;
86.凸起端21连接在一支撑部件23上,支撑部件23具有一在倾斜方向的延伸部24,延伸部24上设置有多个定位螺孔,定位螺孔内能够穿入定位螺栓25。
87.在一个具体的实施例中,对于可调整的、可联动的铰链支撑机构30的设计,请参阅图5、6所示,铰链支撑机构30包括:呈十字交叉铰链连接的两个铰链杆300;每个铰链杆300包括:主杆体310;主杆体310的第一端能够设置一内管320;内管320上设置有弧形滑道321;锁扣部330,其设置在主杆体310的第一端,且锁扣部330上可转动的设置有一拨动限位件331;锁扣部330连通主杆体310的径向,并与弧形滑道321之间形成有一限位空间331,限位空间331内布置一半圆柱件332,半圆柱件332的两端为被限位在锁扣部330内;拨动限位件331的拨动轴偏心的设置在锁扣部330上,以使得其在锁定状态时拨动轴压合半圆柱件332,以使得主杆体310和内管320能够形成锁定;如此设计的优势在于,调整长度时,定位的最小范围更宽泛,相比较于定位孔方式的设计,可调整的最小伸缩范围。
88.另外,请参阅图5、6所示,主杆体310的第二端能够固定连接在施工桥梁底板1上;内管320的第一端设置有一第一转动铰链340,第一转动铰链340上设置有锁环341,锁环341能够预制连接在波形钢腹板100的连接节点上;
89.主杆体310的中部设置有铰链孔,铰链孔内连接有铰链轴351。
90.在一个具体的事实方式中,请参阅图1所示,需要说明的是,本技术方案仍然需要施工辅助拉力器械的协助,具体波形钢腹板100朝向辅助施工脚手架200的一侧能够连接调整环201,调整环201上能够预制连接钢丝拉绳,以使得通过预先布置在辅助施工脚手架200方向的电动葫芦能够拉动钢丝拉绳。
91.在一个具体的事实方式中,请参阅图7、8所示,定位机构40包括:在展翼部2上方预制安装有轨道410,轨道410沿着所述展翼部2的长度方向布置;轨道410上柜接有工作车420;工作车420具有固定板421,展翼部2上设置有锁定孔422;锁定螺柱423,其能够螺接在固定板421、以及对应的锁定孔422上,以使得工作车420能够被锁定在预设位置与展翼部2保持固定。
92.每个定位机构40还包括两个定位组件,定位组件包括:固定连接在固定板421上方的定位部430;定位部430的一侧设置有第一工作气缸431和第二工作气缸432;在极限状态下,第一工作气缸431和第二工作气缸432呈三角形布置,且二者的输出端的延长线相交;
93.其中,第二工作气缸432倾斜布置;
94.第一工作气缸431和第二工作气缸432的输出端分别转动连接在一气缸连接板433上;
95.定位气缸440,其一侧固定在气缸连接板433上;
96.定位气缸440的第一端连接有定位壳体441;
97.定位壳体441的两侧和下端敞开;
98.定位壳体441内转动连接有定位滚轮组件;
99.定位滚轮组件包括:
100.带有扭簧的滚轮轴451,其转动连接在定位壳体441上;
101.第一连接轴臂461和第二连接轴臂462,连接在滚轮轴451上;
102.第一连接轴臂461和第二连接轴臂462呈90度布置,且在预制状态下,第一连接轴臂461与预制轴线形成15度夹角,第二连接轴臂462与预制轴线形成75度夹角;
103.第一连接轴臂461和第二连接轴臂462在远离滚轮轴451的端部连接有具有充气胎的、可转动的滚轮部470。
104.应用该波形钢腹板精准定位装置的进行波形钢腹板定位施工的方法,具体的方式为:首先在施工桥梁底板1上布置施工模板10,施工模板10一般为垂直方式布置的,但实际在施工跨度的需要下,施工模板10是倾斜布置的,但是在布置施工模板10时,都要形成一个与基础平面平行的展翼部2,使得支撑壁面3是垂直的或者是倾斜的,现有技术的大多施工方式中,对于支撑壁面3过于依赖,即采用支撑壁面3作为主要定位方式,而支撑壁面3一般是对称布置在两侧,调整时无法同时保证定位准确性,而本技术方案,首先利用凸起端21、支撑端22作为底部的基础定位,依据垂直方式或者倾斜方式增加支撑部件23、延伸部24;这样可有效的定位波形钢腹板100的下端,尤其是在实施例二中,定位螺栓25与翼缘之间还可以增加填充物,作为有效的与定位阻挡和标识物。
105.两个铰链杆300通过铰链轴351连接,如此,当两个铰链杆300分别连接了两个波形钢腹板100后,通过调整一个波形钢腹板100就可以牵动另一波纹钢腹板100的动作;而且铰链杆300是可调整长度的,便于实际的施工布置。
106.在具体的调整方式中,利用工作车420在轨道410上动作,可锁定螺柱423对当前位置进行锁定,具体地,倾斜的角度通过第一工作气缸431、第二工作气缸432调整,定位气缸440调整伸出长度,使得滚轮部470能够到达波纹钢腹板100的上端翼缘,如此,当滚轮轴451转动时,在扭簧弹性力的作用下,两个滚轮部470在波纹钢腹板100上能够形成两个受理点,两个受理点相当于对于波纹钢腹板100定位的平整性检测,而定位气缸440受力的调整力度使得铰链杆300牵动另一侧的波纹钢腹板100,即一次性对对称的两个波纹钢腹板100同时完成精准定位、调整。
107.本技术方案的优势在于,在精准定位的适用范围适应的波形钢腹板的布置方式更加灵活,尤其使得在面临组合施工的或者与其他顶部结构结合施工因布置角度调整的情况。
108.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1