一种路面缝隙处理设备及其工艺的制作方法
1.本发明涉及路面修复技术领域,尤其是涉及一种路面缝隙处理设备及其工艺。
背景技术:
2.沥青路面是指矿质材料中掺入沥青材料铺筑的各种类型路面。沥青结合料提高铺路用粒料抵抗行车和自然因素对路面损害的能力,沥青路面在使用一定年限后,沥青路面表面会出现少量裂缝从而影响行车安全,需要对沥青路面修补养护。
3.如授权公告号为cn216006556u的中国实用新型的专利公开一种沥青路面养护设备,包括工作箱,工作箱底面的四个对角位置均固定连接有万向轮,工作箱外侧面固定连接有把手,工作箱内腔底面固定连接有搅拌箱和加热箱,搅拌箱内转动连接有搅拌轴,并在搅拌轴外侧面固定套接有搅拌叶,工作箱内腔顶面固定安装有用于驱动搅拌轴转动的驱动电机,工作箱内腔顶面转动连接有第一转轴;通过啮合机构、加热箱、加热元件、吹风扇叶、喷头等配合使用,使得吹风扇叶转动将加热元件加热的空气通过喷头向新填充的沥青表面喷射。
4.针对上述的相关技术,发明人认为该沥青路面养护设备是通过万向轮的转向来控制出料管的出料路径,但是出料管位于工作箱底部不便于观察路面的缝隙填补情况。
技术实现要素:
5.为了改善路面的缝隙填补情况不便于观察的问题,本技术提供一种路面缝隙处理设备及其工艺。
6.第一方面,本发明提供的一种路面缝隙处理设备,采用如下的技术方案:一种路面缝隙处理设备,包括水平设置的修复平台、架设于所述修复平台上方的存料罐体、安装于所述修复平台上方的喷料枪头,所述喷料枪头通过运输软管与所述存料罐体相互连通,还包括铰接于所述修复平台顶面的喷料直杆一和铰接于所述喷料直杆一端部的喷料直杆二,所述喷料直杆一转动轴线竖直设置,所述喷料枪头固定于所述喷料直杆二远离所述喷料直杆一的端部,所述修复平台顶面滑移设置有修复齿条,所述喷料直杆一靠近所述修复齿条的端部固定有喷料扇轮,喷料扇轮与修复齿条相互啮合;修复平台设有用于驱动修复齿条往复滑移的往复机构。
7.通过采用上述技术方案,路面的缝隙情况是不规则分布的,往复机构通过修复齿条带动喷料扇轮往复摆动,使得喷料枪头能修复不规则的路面的缝隙,以此提高存料罐体内的修复剂的使用率。
8.可选的,修复齿条位于所述修复平台上下表面均设有一个,所述修复平台下方设有用于打磨路面缝隙的扩缝机构,所述扩缝机构包括铰接于所述修复平台底面的驱动直杆、竖直固定于所述驱动直杆远离所述修复齿条的端部的驱动套筒、固定于所述驱动套筒顶端的驱动电机、转动于所述驱动套筒内的驱动钻头,所述驱动直杆转动轴线竖直设置,所述驱动钻头与所述驱动电机输出轴同轴固定,所述驱动直杆靠近所述修复齿条的端部固定
有驱动扇轮,所述驱动扇轮与所述修复齿条相啮合。
9.通过采用上述技术方案,扩缝机构设置是为了打磨路面缝隙的内壁和拓宽路面的缝隙,以此提高修复剂位于路面缝隙里面的流动性,尽量避免路面缝隙的缝隙处出现堵塞的问题。
10.可选的,所述修复平台下方设有用于路面缝隙吸尘的吸尘机构,所述吸尘机构包括设于所述修复平台下方的清理直板、滑移于所述清理直板与所述修复平台之间的导轨凸块、固定于所述导轨凸块内的旋转接头、转动于所述旋转接头底端的圆锥筒,所述旋转接头通过气管与吸尘设备相连接,所述圆锥筒外周面设有若干个清理通槽;所述修复平台设有用于驱动所述圆锥筒往复滑移的驱动机构。
11.通过采用上述技术方案,吸尘设备通过气管作用于圆锥筒,圆锥筒通过清理通槽清理路面缝隙内的灰尘和杂质,尽量避免灰尘和杂质占据路面的缝隙处而导致路面缝隙处的修复剂不够量,导致路面缝隙的修复效果不佳。
12.可选的,所述往复机构包括转动于所述修复平台的螺纹直杆、固定于修复平台侧壁的伺服电机、固定于两个修复齿条之间的连接直板,所述螺纹直杆同轴固定于所述伺服电机输出轴,所述连接直板螺纹连接于所述螺纹直杆周侧;所述驱动机构包括转动于修复平台下方的丝杠、固定于所述清理直板侧壁的动力电机,所述丝杠同轴固定于所述动力电机输出轴,所述导轨凸块螺纹连接于所述丝杠周侧;所述动力电机和所述伺服电机均通过系统中心控制。
13.通过采用上述技术方案,路面缝隙内存在顽固的杂质时,旋转电机通电启动并通过同步皮带驱动若干排清理刷毛转动,通过高速旋转的清理刷毛能打落路面缝隙内存在顽固的杂质。
14.可选的,所述圆锥筒周侧设有用于刮擦路面缝隙的清理机构,所述清理机构包括固定于所述导轨凸块表面的旋转电机、共同套设于所述旋转电机输出轴与所述圆锥筒周侧的同步皮带,所述圆锥筒外周面固定有若干排清理刷毛。
15.通过采用上述技术方案,系统中心将路面缝隙的路径信息转化成电信号反馈给伺服电机和动力电机,伺服电机通过控制螺纹直杆的转向来控制驱动钻头的摆动,以此实现驱动钻头沿路面缝隙的路径移动;动力电机控制丝杠的转向来控制圆锥筒的滑移,以此实现圆锥筒沿路面缝隙的路径移动,以此实现驱动钻头和圆锥筒对路面尽可能地减少破坏。
16.可选的,所述修复平台侧壁设有若干个行走结构,所述行走结构包括铰接于所述修复平台侧壁的升降直杆、铰接于所述修复平台侧壁的升降气缸和转动于所述升降直杆底端的定向轮,所述升降直杆与所述升降气缸转动轴线均水平设置,升降直杆顶端和升降气缸的输出轴相铰接。
17.通过采用上述技术方案,通过行走机构控制修复平台的升降,可以使得驱动钻头和圆锥筒能够伸入路面缝隙,又可以使得驱动钻头和圆锥筒能够脱离路面缝隙,以便于清理和修补工作的交换。
18.可选的,所述喷料直杆二的转动轴线水平设置,所述修复平台顶面设有用于承托所述喷料枪头的承托机构,所述承托机构包括竖直固定于所述修复平台顶面的承托直杆、固定于所述承托直杆顶端的弹性抱箍,所述喷料直杆二和所述运输软管可卡接于所述弹性抱箍内。
19.通过采用上述技术方案,喷料直杆二旋转至竖直方向时,喷料直杆二和运输软管可卡接于弹性抱箍内侧,以便于下次修复工作和减少喷料枪头发生磕碰。
20.可选的,所述驱动钻头底端为形状呈倒立的尖锥状。
21.通过采用上述技术方案,倒立圆锥状的驱动钻头能够拓宽路面缝隙的开口,能够形成上宽下窄的形状,以便于修复剂更好地流入路面缝隙处的位置。
22.第二方面,本发明提供的一种路面缝隙处理的工艺,采用如下的技术方案:一种路面缝隙处理的工艺,包括以下步骤:s1:修复路径的制定,通过摄像头扫描出路面缝隙分布情况并反馈给系统中心,系统中心通过分布情况制定出驱动钻头、圆锥筒和喷料枪头的移动路径;s2:修复平台的降低,升降气缸通过升降直杆带动定向轮进行转动,升降直杆逐渐趋向水平方向旋转,直至驱动钻头和圆锥筒能伸入路面缝隙;s3:路面缝隙的打磨,系统中心通过伺服电机控制着螺纹直杆的转向,螺纹直杆控制修复齿条往复滑移,修复齿条通过驱动扇轮带动驱动钻头摆动,驱动电机控制驱动钻头对路面的缝隙进行打磨;s4:路面缝隙的清理,系统中心通过动力电机控制着丝杠的转向,丝杠通过导轨凸块控制圆锥筒往复滑移,圆锥筒通过清理刷毛清理路面缝隙内的顽固杂质,通过清理通槽吸出灰尘和杂质;s5:修复平台的升高,升降气缸通过升降直杆带动定向轮转动,升降直杆逐渐趋向竖直方向旋转,直至驱动钻头和圆锥筒脱离出路面缝隙;s6:路面缝隙的修复,清理工作结束后,驱动修复平台反方向移动,系统中心通过伺服电机控制螺纹直杆的转向,螺纹直杆控制修复齿条往复滑移,修复齿条通过喷料扇轮带动喷料枪头摆动,喷料枪头朝向路面的缝隙喷射修复剂;s7:喷料枪头放置,喷料直杆二旋转至竖直方向的同时,喷料直杆二和运输软管卡接于弹性抱箍,以便于下次清理和修复工作。
23.通过采用上述技术方案,首先通过驱动钻头针对路面的缝隙进行扩宽处理,然后通过清理机构和吸尘机构双重的作用能清理路面的缝隙内的顽固杂质和灰尘;然后通过喷料枪头朝向路面缝隙内灌注修复剂。先拓宽的设置以便于修复剂的流动。
24.综上所述,本技术包括以下至少一种有益技术效果:1.路面的缝隙情况是不规则分布的,往复机构通过修复齿条带动喷料扇轮往复摆动,使得喷料枪头能修复不规则的路面的缝隙,以此提高存料罐体内的修复剂的使用率;2.扩缝机构设置是为了打磨路面缝隙的内壁和拓宽路面的缝隙,以此提高修复剂位于路面缝隙里面的流动性,尽量避免路面缝隙的缝隙处出现堵塞的问题;3.系统中心将路面缝隙的路径信息转化成电信号反馈给伺服电机和动力电机,伺服电机通过控制螺纹直杆的转向来控制驱动钻头的摆动,以此实现驱动钻头沿路面缝隙的路径移动;动力电机控制丝杠的转向来控制圆锥筒的滑移,以此实现圆锥筒沿路面缝隙的路径移动,以此实现驱动钻头和圆锥筒对路面尽可能地减少破坏。
附图说明
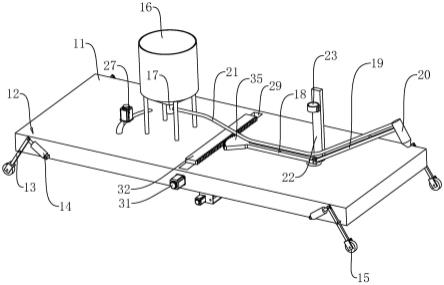
25.图1是本技术实施例中路面缝隙处理设备的结构示意图。
26.图2是本技术实施例中路面缝隙处理设备底部的结构示意图。
27.图3是本技术实施例中修复齿条和螺纹直杆的结构示意图。
28.图4是本技术实施例中清理直板的结构示意图。
29.附图标记:11、修复平台;12、行走结构;13、升降直杆;14、升降气缸;15、定向轮;16、存料罐体;17、控制阀门;18、喷料直杆一;19、喷料直杆二;20、喷料枪头;21、运输软管;22、承托直杆;23、弹性抱箍;24、驱动直杆;25、驱动套筒;26、让位通槽;27、驱动电机;28、驱动钻头;29、修复通槽;30、螺纹直杆;31、伺服电机;32、修复齿条;33、连接直板;34、螺纹通孔;35、喷料扇轮;36、驱动扇轮;37、清理直板;38、支撑直板;39、丝杠;40、动力电机;41、导轨凸块;42、旋转接头;43、圆锥筒;44、清理通槽;45、清理刷毛;46、旋转电机;47、同步皮带。
具体实施方式
30.以下结合附图1-4对本技术作进一步详细说明。
31.本技术实施例公开一种路面缝隙处理设备。参照图1与图2,路面缝隙处理设备前进方向为正方向,路面缝隙处理设备包括水平设置的修复平台11,修复平台11左右侧壁均设有车轮可升降的行走结构12,修复平台11各个侧壁的行走结构12沿修复平台11长度方向均设有两个。行走结构12包括铰接于修复平台11侧壁的升降直杆13、铰接于修复平台11侧壁的升降气缸14,升降直杆13与升降气缸14的转动轴线水平设置。升降直杆13顶端和升降气缸14的输出轴相铰接设置,升降直杆13底端转动安装有定向轮15。
32.参照图1与图2,修复平台11上方设置有用于存放修复剂的存料罐体16,存料罐体16通过三根竖直设置撑脚架设于修复平台11顶面,存料罐体16底部固定有用于控制修复剂流量的控制阀门17。修复平台11顶面铰接有喷料直杆一18,喷料直杆一18远离存料罐体16的一端铰接有喷料直杆二19,喷料直杆一18转动轴线竖直设置,喷料直杆二19的转动轴线水平设置。喷料直杆一18与喷料直杆二19之间的铰接点位于喷料直杆一18与喷料直杆二19之间的铰接点正上方。喷料直杆二19远离喷料直杆一18的端部垂直固定有喷料枪头20,喷料枪头20通过运输软管21与控制阀门17相连通。修复平台11竖直固定有承托直杆22,承托直杆22顶端水平固定有弹性抱箍23。喷料直杆二19旋转至竖直方向的时候,喷料直杆二19和运输软管21可卡接于弹性抱箍23内侧。
33.参照图1与图2,修复平台11底面铰接有驱动直杆24,驱动直杆24转动轴线竖直设置,驱动直杆24远离喷料直杆一18的端部竖直固定有驱动套筒25。修复平台11设有贯穿自身上下表面的让位通槽26,驱动套筒25顶端通过让位通槽26穿过修复平台11,驱动套筒25顶端固定有驱动电机27,让位通槽26的横截面呈圆弧状。驱动套筒25内部竖直穿设有驱动钻头28,驱动钻头28顶端与驱动电机27输出轴的端部固定连接,驱动钻头28底端为形状呈倒立的尖锥状。
34.参照图1与图3,修复平台11顶面开设有修复通槽29,修复通槽29沿修复平台11宽度的方向设置。修复平台11通过修复通槽29穿设有螺纹直杆30,螺纹直杆30沿修复平台11宽度的方向设置。修复平台11左侧壁固定有通过系统中心控制的伺服电机31,螺纹直杆30同轴固定于伺服电机31输出轴。修复平台11上下两个表面均沿自身宽度的方向设有修复齿条32,两个修复齿条32相靠近的侧壁之间固定有连接直板33,连接直板33竖直穿设于修复通槽29内。连接直板33沿螺纹直杆30长度的方向设有螺纹通孔34,以此实现连接直板33通过螺纹通孔34螺纹连接于螺纹直杆30周侧。
35.参照图2与图4,驱动钻头28靠近修复平台11前侧,喷料枪头20靠近修复平台11后侧。喷料直杆一18靠近修复齿条32的端部固定有喷料扇轮35,驱动直杆24靠近修复齿条32
的端部固定有驱动扇轮36。喷料扇轮35和驱动扇轮36均为圆弧面设有咬合齿的扇形面板,喷料扇轮35和驱动扇轮36分别于两个修复齿条32相啮合。修复平台11下方设有清理直板37,清理直板37两端均通过支撑直板38固定于修复平台11底面,清理直板37沿修复平台11宽度的方向设置。两个支撑直板38相靠近的侧壁之间穿设有丝杠39,丝杠39沿修复平台11宽度的方向设置。修复平台11左侧的支撑直板38侧壁固定有通过系统中心控制的动力电机40,丝杠39同轴固定于动力电机40输出轴。
36.参照图2与图4,两个支撑直板38之间设有导轨凸块41,导轨凸块41沿丝杠39长度的方向开设有螺纹通孔34,以此实现导轨凸块41通过螺纹通孔34螺纹连接于丝杠39周侧。导轨凸块41顶面竖直穿设有旋转接头42,旋转接头42固定于导轨凸块41内部,旋转接头42顶端通过气管与吸尘设备相连接。旋转接头42底端转动安装有圆锥筒43,圆锥筒43与旋转接头42相连通。圆锥筒43圆周面以自身轴心为轴向开设有三个清理通槽44,圆锥筒43圆周面以自身轴心为轴向固定有三排清理刷毛45,清理通槽44和清理刷毛45均沿竖直方向设置。导轨凸块41顶面固定有旋转电机46,旋转电机46输出轴竖直朝下穿过导轨凸块41,旋转电机46输出轴与圆锥筒43的外周面共同套设同步皮带47。
37.一种路面缝隙处理的工艺,包括以下步骤:s1、修复路径的制定,通过摄像头扫描出路面缝隙分布情况并反馈给系统中心,系统中心通过分布情况制定出驱动钻头28、圆锥筒43和喷料枪头20的移动路径;s2、修复平台11的降低,升降气缸14通过升降直杆13带动定向轮15转动,升降直杆13逐渐趋向水平方向旋转,直至驱动钻头28和圆锥筒43能伸入路面缝隙;s3、路面缝隙的打磨,系统中心通过伺服电机31控制着螺纹直杆30的转向,螺纹直杆30控制修复齿条32往复滑移,修复齿条32通过驱动扇轮36带动驱动钻头28摆动,驱动电机27控制驱动钻头28对路面的缝隙进行打磨,使得驱动钻头28沿路面缝隙的路径移动;s4、路面缝隙的清理,系统中心通过动力电机40控制着丝杠39的转向,丝杠39通过导轨凸块41控制圆锥筒43往复滑移,使得圆锥筒43沿路面缝隙的路径移动,圆锥筒43通过清理刷毛45清理路面缝隙内的顽固杂质,然后通过清理通槽44吸出灰尘和杂质;s5、修复平台11的升高,升降气缸14通过升降直杆13带动定向轮15转动,升降直杆13逐渐趋向竖直方向旋转,直至驱动钻头28和圆锥筒43脱离出路面缝隙;s6、路面缝隙的修复,清理工作结束后,首先驱动修复平台11反方向移动,然后系统中心通过伺服电机31控制螺纹直杆30的转向,螺纹直杆30控制修复齿条32往复滑移,修复齿条32通过喷料扇轮35带动喷料枪头20摆动,喷料枪头20朝向路面的缝隙喷射修复剂,使得喷料枪头20沿路面缝隙的路径移动;s7、喷料枪头20放置,清理和修复工作结束,喷料直杆二19旋转至竖直方向的同时,喷料直杆二19和运输软管21卡接于弹性抱箍23,以便于下次清理和修复工作。
38.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1