支撑轨与地面感应环线整平一体机的制作方法
本发明属于整平施工,更具体地说,是涉及支撑轨与地面感应环线整平一体机。
背景技术:
1、管梁架设完成后将对管梁内部桥面进行施工,支撑轨与地面感应环线是桥面系施工中的重要工序。支撑轨是飞车行驶的轨道,能够为飞车提供支撑。地面感应环线是安装交叉通信环线的平台,地面感应环线是飞车行驶时的磁电感应接收器,用来检测车辆在行驶过程的运行轨迹、行驶速度、所在位置以及行驶状态等功能。飞车的时速可达1000km/h,支撑轨与地面感应环线的施工质量直接影响飞车的行驶安全性,所以对支撑轨与地面感应环线的施工要求特别严格,通常σ≤1.32mm,iri≤2.2m/km,最大间隙3mm,并且有一级混凝土路面平整度要求。
2、施工时人为控制无法满足上述要求,往往后期需要投入大量的人员、机械设备、时间,以满足飞车的行驶要求,导致施工成本较高,施工特别困难并且工期无法得到保障。
技术实现思路
1、本发明的目的在于提供支撑轨与地面感应环线整平一体机,旨在解决支撑轨与地面感应环线表面质量施工难度大,成本较高,所需工期较长的问题。
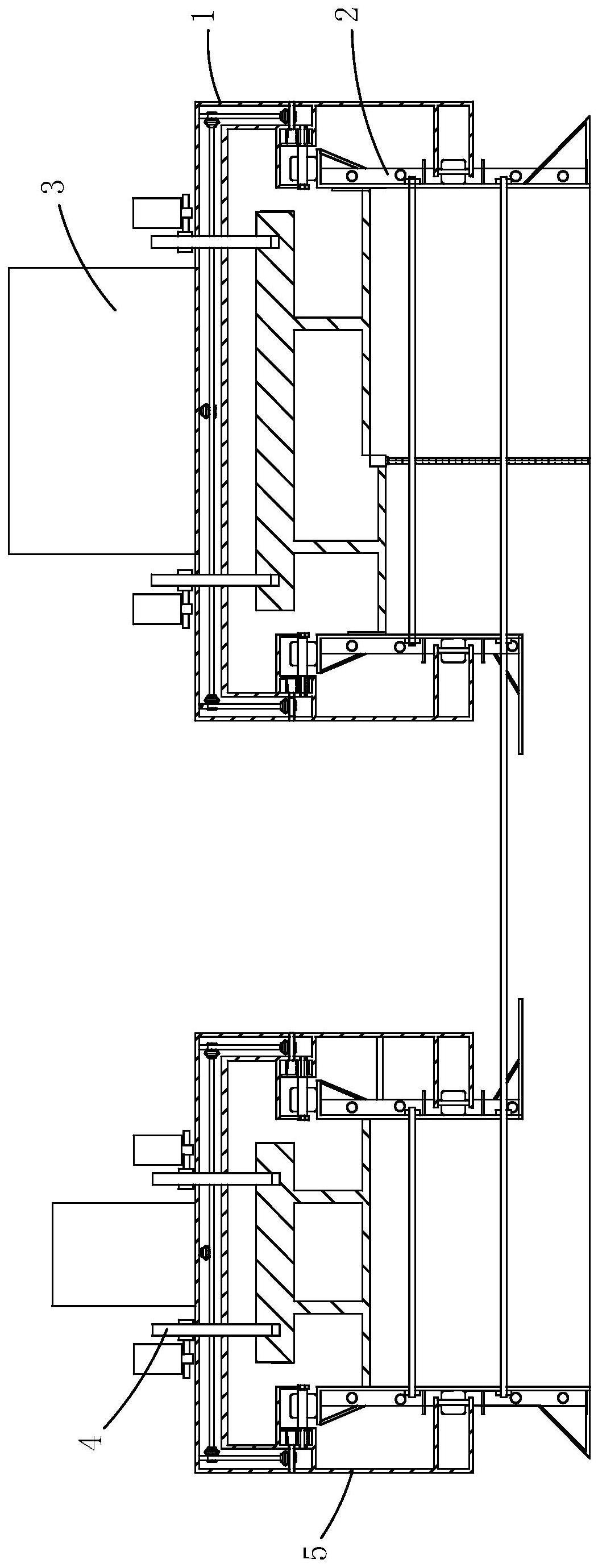
2、为实现上述目的,本发明采用的技术方案是:提供支撑轨与地面感应环线整平一体机,包括:
3、拉设支撑轨以及地面感应环线的边线,根据所述边线的位置架设模板;
4、在所述模板内定位错台支撑,在所述错台支撑的两侧面与对应侧的所述模板之间浇筑混凝土;
5、将支撑架放置在所述模板上,调整抹平板相对于所述支撑架的位置,使所述抹平板底部的第一面和第二面分别调整至对应的位置;
6、由所述支撑架带动所述抹平板沿所述模板运动,通过所述第一面和所述第二面分别整平出所述支撑轨抹表面以及所述地面感应环线表面。
7、在一种可能的实现方式中,所述拉设支撑轨以及地面感应环线的边线包括:
8、通过全站仪进行标记,并根据所述标记拉设所述边线。
9、在一种可能的实现方式中,所述在所述模板内定位错台支撑包括:
10、沿所述错台支撑顶部的长度方向上依次连接多个错台块,对多个所述错台块的位置进行校准,所述错台块用于限定所述第一面的位置。
11、在一种可能的实现方式中,所述调整抹平板相对于支撑架的位置包括:
12、借助所述全站仪,并通过调整所述抹平板与所述支撑架之间的多个调节柱,改变所述抹平板相对于所述支撑架的位置。
13、在一种可能的实现方式中,所述通过所述第一面和所述第二面分别整平出所述支撑轨抹表面以及所述地面感应环线表面包括:
14、在对混凝土表面整平的过程中,通过实时调整多个所述调节柱在所述抹平板与所述支撑架之间的长度,使所述抹平板沿预设的轨迹稳定运动。
15、在一种可能的实现方式中,所述通过实时调整多个所述调节柱在所述抹平板与所述支撑架之间的长度包括:
16、所述调节柱分别螺纹连接在所述支撑架和所述抹平板上,并且所述调节柱两端的螺纹旋向相反设置;
17、通过转动对应的所述调节柱从而在整平的过程中保证所述抹平板相对于所述模板位置的稳定。
18、在一种可能的实现方式中,所述通过转动对应的所述调节柱从而在整平的过程中保证所述抹平板相对于所述模板位置的稳定包括:
19、沿所述模板长度方向上设置标定板,通过所述抹平板上不同位置的多个传感器实时检测与两侧的所述标定板的距离;
20、通过多个所述传感器所检测到的数据实时确定出所述抹平板相对于所述模板的空间位置。
21、在一种可能的实现方式中,所述通过多个所述传感器所检测到的数据实时确定出所述抹平板相对于所述模板的空间位置包括:
22、将所述标定板自所述模板倾斜向外侧设置;
23、在上位机内分别进行所述标定板和所述抹平板的建模;
24、根据多个所述传感器所传回的数据,在所述上位机内模拟出所述抹平板相对于所述标定板的位置。
25、在一种可能的实现方式中,所述通过转动对应的所述调节柱从而在整平的过程中保证所述抹平板相对于所述模板位置的稳定包括:
26、根据当前所述上位机内抹平板的角度变化,结合所述调节柱的螺距等参数,确定出为使所述抹平板空间姿态回归正常对应的所述调节柱所需转动的圈数。
27、在一种可能的实现方式中,在所述使所述抹平板沿预设的轨迹稳定运动之后还包括:
28、在所述抹平板的后侧安装扫描仪,将所述扫描仪所检测到的信息实时传输至所述上位机;
29、在所述上位机内对所述信息进行整合,从而确定出所述支撑轨表面以及所述地面感应环线表面的平面度等指标。
30、本发明提供的支撑轨与地面感应环线整平一体机的有益效果在于:与现有技术相比,本发明支撑轨与地面感应环线整平一体机中首先拉设支撑轨以及地面感应环线的边线,通过边线就能够准确的将模板定位在合适的位置。模板架设完成之后,在模板的内侧定位错台支撑,然后在错台支撑以及模板之间浇筑混凝土。
31、将支撑架放置在模板上,然后根据要求调整抹平板与支撑架的相对位置,从而使第一面和第二面处于对应的位置。在支撑架沿模板运动的同时会带动抹平板运动,而抹平板的运动会通过第一面和第二面分别对支撑轨表面和地面感应环线表面进行整平。
32、本申请提供的整平一体机,能够同时对支撑轨和地面感应环线同时进行整平,并且通过边线能够将模板进行准确的定位,模板定位之后,支撑架以及抹平板就能够沿预定的轨迹运动,从而保证了整平的精度,并且极大的降低了施工时间,降低了成本,保证了施工质量。
技术特征:
1.支撑轨与地面感应环线整平一体机,其特征在于,包括:
2.如权利要求1所述的支撑轨与地面感应环线整平一体机,其特征在于,所述拉设支撑轨以及地面感应环线的边线包括:
3.如权利要求2所述的支撑轨与地面感应环线整平一体机,其特征在于,所述在所述模板内定位错台支撑包括:
4.如权利要求2所述的支撑轨与地面感应环线整平一体机,其特征在于,所述调整抹平板相对于支撑架的位置包括:
5.如权利要求4所述的支撑轨与地面感应环线整平一体机,其特征在于,所述通过所述第一面和所述第二面分别整平出所述支撑轨抹表面以及所述地面感应环线表面包括:
6.如权利要求5所述的支撑轨与地面感应环线整平一体机,其特征在于,所述通过实时调整多个所述调节柱在所述抹平板与所述支撑架之间的长度包括:
7.如权利要求6所述的支撑轨与地面感应环线整平一体机,其特征在于,所述通过转动对应的所述调节柱从而在整平的过程中保证所述抹平板相对于所述模板位置的稳定包括:
8.如权利要求7所述的支撑轨与地面感应环线整平一体机,其特征在于,所述通过多个所述传感器所检测到的数据实时确定出所述抹平板相对于所述模板的空间位置包括:
9.如权利要求8所述的支撑轨与地面感应环线整平一体机,其特征在于,所述通过转动对应的所述调节柱从而在整平的过程中保证所述抹平板相对于所述模板位置的稳定包括:
10.如权利要求8所述的支撑轨与地面感应环线整平一体机,其特征在于,在所述使所述抹平板沿预设的轨迹稳定运动之后还包括:
技术总结
本发明提供了支撑轨与地面感应环线整平一体机,属于整平施工技术领域,包括:拉设支撑轨以及地面感应环线的边线,根据边线的位置架设模板。在模板内定位错台支撑,在错台支撑的两侧面与对应侧的模板之间浇筑混凝土。将支撑架放置在模板上,调整抹平板相对于支撑架的位置,使抹平板底部的第一面和第二面分别调整至对应的位置。由支撑架带动抹平板沿模板运动,通过第一面和第二面分别整平出支撑轨抹表面以及地面感应环线表面。本发明提供的支撑轨与地面感应环线整平一体机通过边线能够将模板进行准确的定位,模板定位之后,支撑架以及抹平板就能够沿预定的轨迹运动,保证了整平的精度,并且极大的降低了施工时间,降低了成本,保证了施工质量。
技术研发人员:杨学昆,吴玉伟,张新艺,杨旭峰,杜休,李秋丽,王珣,张旭亮,李仁,李军,王云鹏,韩林杰
受保护的技术使用者:中铁六局集团有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!