一种核电隧洞海生物清理设备及系统的制作方法
本发明涉及隧洞机器人,尤其涉及一种核电隧洞海生物清理设备及系统。
背景技术:
1、海底取水隧洞在长期使用后,隧洞内壁会生长出大量的海生物,过多的海生物会减少取水隧洞的取水面积,进而对隧洞的取水能力产生重大的影响。海底取水隧洞内海生物体量庞大、且杂物较多(如钢筋、石块等),在进行隧洞清理后,海生物大量堆积于隧洞内壁弧面及底部中间平面。由于隧洞结构限制,隧洞内壁弧面上的海生物难以彻底清理干净,往往存在海生物残余。
技术实现思路
1、本发明要解决的技术问题在于,针对上述背景技术中提及的相关技术存在的至少一个缺陷:在进行隧洞清理后,海生物大量堆积于隧洞内壁弧面及中间平面,难以彻底清理干净,提供一种核电隧洞海生物清理设备及系统。
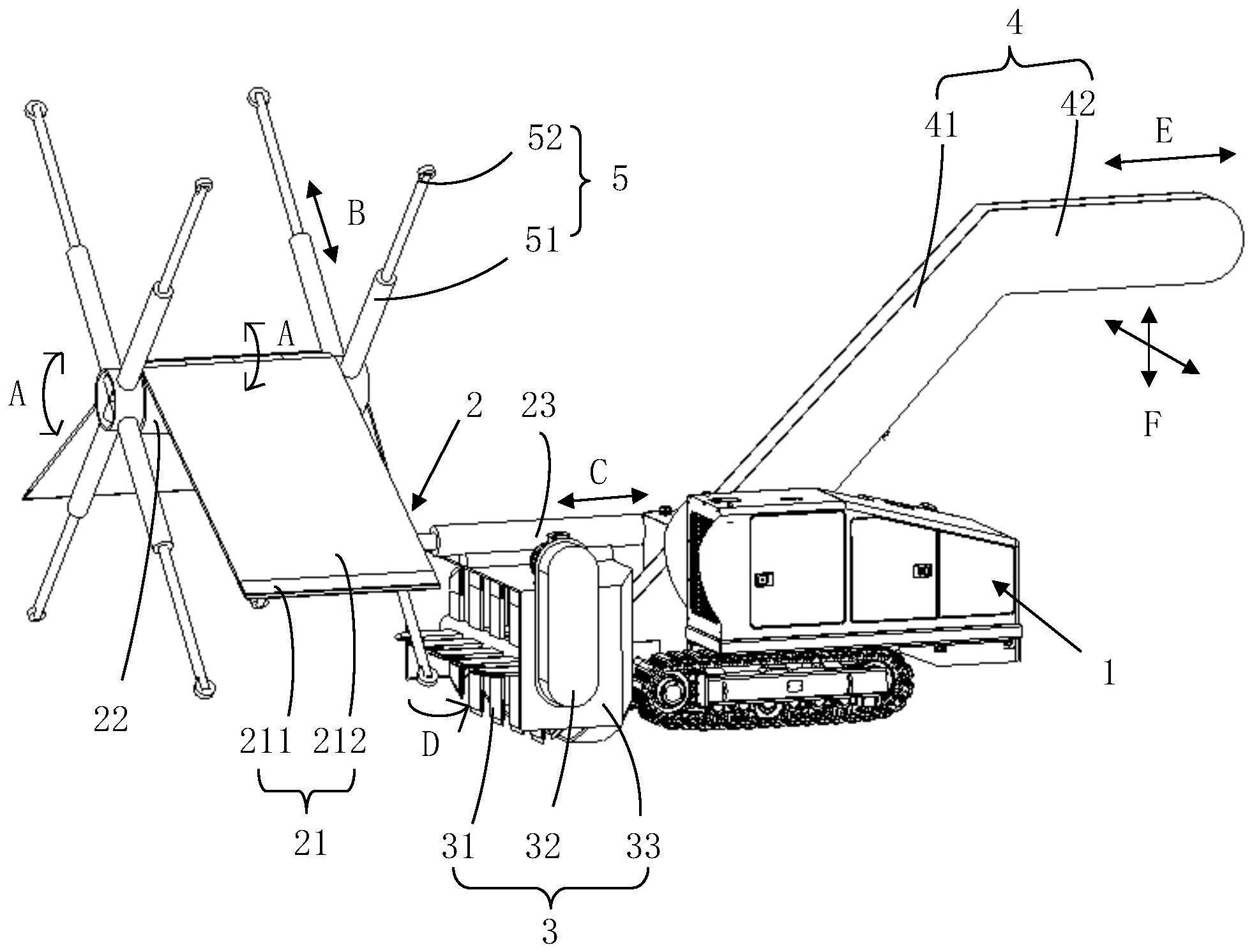
2、本发明解决其技术问题所采用的技术方案是:构造一种核电隧洞海生物清理设备,包括可蠕动前进的主体装置,以及分别设于所述主体装置上的清理聚拢装置、收集装置和传送装置;
3、所述清理聚拢装置包括位于所述主体装置前端的呈翼状且可绕隧洞轴向转动的两清理刮板;所述清理刮板的侧部用于与所述隧洞的内壁相贴合,且所述清理刮板用于在所述主体装置每蠕动前进一段距离后沿所述隧洞内壁向下合拢,以清理所述隧洞内壁上的海生物,并将清理剥落的海生物聚拢在所述隧洞底部的中间平面上;
4、所述收集装置位于两所述清理刮板的后端,用于在所述主体装置的前进下将聚拢在所述隧洞底部的中间平面上的海生物收集至所述传送装置。
5、优选地,在本发明所述的核电隧洞海生物清理设备中,所述核电隧洞海生物清理设备还包括设于所述清理聚拢装置上的对中定位装置;所述对中定位装置用于所述主体装置左右偏斜时对所述主体装置进行自适应辅助对中定位。
6、优选地,在本发明所述的核电隧洞海生物清理设备中,所述对中定位装置包括设于清理聚拢装置两端且沿所述隧洞径向布置的多个辅助支臂以及设于所述辅助支臂末端的靠壁滑动件;
7、所述辅助支臂对所述靠壁滑动件施加一个预压力,使所述靠壁滑动件贴合所述隧洞内壁;当所述主体装置左右偏斜时,所述辅助支臂可自适应进行往复运动,以使所述主体装置处于中心线。
8、优选地,在本发明所述的核电隧洞海生物清理设备中,所述清理聚拢装置还包括第一驱动件以及连接两所述清理刮板的旋转件;
9、所述清理刮板包括主体部以及所述侧部,所述侧部通过第一伸缩机构在所述主体部上进行伸缩;
10、所述主体装置的电控系统控制所述第一驱动件以驱动所述旋转件旋转,将两所述清理刮板旋转至所述隧洞内壁上海生物附着最高点后,所述主体装置的电控系统控制所述第一伸缩机构以将所述侧部伸出至与所述隧洞的内壁相贴合,所述主体装置的电控系统再控制所述第一驱动件以驱动所述旋转件旋转,将两所述清理刮板沿所述隧洞内壁向下合拢。
11、优选地,在本发明所述的核电隧洞海生物清理设备中,所述清理聚拢装置还包括与所述主体装置相连接的前后伸缩件。
12、优选地,在本发明所述的核电隧洞海生物清理设备中,所述收集装置包括滚动刮板、第二驱动件以及位于所述滚动刮板后方的收集箱;
13、所述收集箱的前后端开设有进料口和出料口,所述主体装置的电控系统控制所述第二驱动件以驱动所述滚动刮板向进料口方向旋转。
14、优选地,在本发明所述的核电隧洞海生物清理设备中,所述滚动刮板的上部为刚性材料,下部为耐磨性材料。
15、优选地,在本发明所述的核电隧洞海生物清理设备中,所述收集箱的底部和所述侧部安装有护板,用于避免对所述隧洞底部平面产生损伤。
16、优选地,在本发明所述的核电隧洞海生物清理设备中,所述传送装置包括第一传送组件以及在所述第一传送组件末端可伸缩和多向调节的第二传送组件。
17、优选地,在本发明所述的核电隧洞海生物清理设备中,所述传送装置还包括连接所述第一传送组件和所述第二传送组件的连接臂以及设于所述连接臂上的第二伸缩机构和旋转机构;
18、所述主体装置的电控系统控制所述第二伸缩机构和所述旋转机构以调节所述第二传送组件传送海生物的位置。
19、本发明还构造了一种核电隧洞海生物清理系统,包括上述任一项所述的核电隧洞海生物清理设备和运输设备;所述传送装置将海生物传送至所述运输设备。
20、通过实施本发明,具有以下有益效果:
21、本发明提供了一种蠕动式核电隧洞海生物清理设备,可简单高效地将隧洞内壁两侧的海生物清理剥落后向底部中间平面聚拢,还可对聚拢后的海生物进行快速收集和传送,且不受海生物中杂物的影响。
技术特征:
1.一种核电隧洞海生物清理设备,其特征在于,包括可蠕动前进的主体装置(1),以及分别设于所述主体装置(1)上的清理聚拢装置(2)、收集装置(3)和传送装置(4);
2.根据权利要求1所述的核电隧洞海生物清理设备,其特征在于,所述核电隧洞海生物清理设备还包括设于所述清理聚拢装置(2)上的对中定位装置(5);所述对中定位装置(5)用于所述主体装置(1)左右偏斜时对所述主体装置(1)进行自适应辅助对中定位。
3.根据权利要求2所述的核电隧洞海生物清理设备,其特征在于,所述对中定位装置(5)包括设于清理聚拢装置(2)两端且沿所述隧洞径向布置的多个辅助支臂(51)以及设于所述辅助支臂(51)末端的靠壁滑动件(52);
4.根据权利要求1所述的核电隧洞海生物清理设备,其特征在于,所述清理聚拢装置(2)还包括第一驱动件以及连接两所述清理刮板(21)的旋转件(22);
5.根据权利要求1所述的核电隧洞海生物清理设备,其特征在于,所述清理聚拢装置(2)还包括与所述主体装置(1)相连接的前后伸缩件(23)。
6.根据权利要求1所述的核电隧洞海生物清理设备,其特征在于,所述收集装置(3)包括滚动刮板(31)、第二驱动件(32)以及位于所述滚动刮板(31)后方的收集箱(33);
7.根据权利要求6所述的核电隧洞海生物清理设备,其特征在于,所述滚动刮板(31)的上部为刚性材料,下部为耐磨性材料。
8.根据权利要求6所述的核电隧洞海生物清理设备,其特征在于,所述收集箱(33)的底部和所述侧部(211)安装有护板,用于避免对所述隧洞底部平面产生损伤。
9.根据权利要求1所述的核电隧洞海生物清理设备,其特征在于,所述传送装置(4)包括第一传送组件(41)以及在所述第一传送组件(41)末端可伸缩和多向调节的第二传送组件(42)。
10.根据权利要求9所述的核电隧洞海生物清理设备,其特征在于,所述传送装置(4)还包括连接所述第一传送组件(41)和所述第二传送组件(42)的连接臂以及设于所述连接臂上的第二伸缩机构和旋转机构;
11.一种核电隧洞海生物清理系统,其特征在于,包括权利要求1-10任一项所述的核电隧洞海生物清理设备和运输设备;所述传送装置(4)将海生物传送至所述运输设备。
技术总结
本发明公开了一种核电隧洞海生物清理设备及系统,包括可蠕动前进的主体装置,以及分别设于主体装置上的清理聚拢装置、收集装置和传送装置;清理聚拢装置包括位于主体装置前端的呈翼状且可绕隧洞轴向转动的两清理刮板;清理刮板的侧部用于与隧洞的内壁相贴合,且清理刮板用于在主体装置每蠕动前进一段距离后沿隧洞内壁向下合拢,以清理隧洞内壁上的海生物,并将清理剥落的海生物聚拢在隧洞底部的中间平面上;收集装置位于两清理刮板的后端,用于在主体装置的前进下将聚拢在隧洞底部的中间平面上的海生物收集至传送装置。本发明的蠕动式,可简单高效地将隧洞内壁两侧的海生物清理剥落后向底部中间平面聚拢,还可对聚拢后的海生物进行快速收集和传送。
技术研发人员:王国河,王海,余冰,张美玲,刘帅,吴玉
受保护的技术使用者:中广核研究院有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!