一种地铁双全站仪智能控制滑模摊铺系统的制作方法
本发明涉及全站仪智能控制滑模摊铺机,具体为一种地铁双全站仪智能控制滑模摊铺系统。
背景技术:
1、地铁轨道施工现场是一个交错杂乱的作业空间,受作业空间和环境的影响,一条完整的轨道摊铺作业施工往往涉及到人员调配、设备配备、物料统计、进度把控,质量监督等等各方面的工作,因此,现场施工是一个复杂艰难并伴有安全隐患和环境污染的工作。在传统的施工作业中,一般需要有人工立模、摊铺、拆模三个主要完成轨道摊铺作业步骤,一切的作业都建立在多人的基础上,且完成作业质量精度差。
2、不难看出,传统的地铁轨道摊铺作业施工模式存在以下弊端:作业效率低下:因为都是多人力完成,现场作业不可控因素多,作业过程繁杂加之现场环境等情况,所以施工效率会大受影响,这也是导致工期不可控的原因。浪费人力且不环保:现场施工需要很多人力共同协作完成,不仅产生人力资源浪费同时也会在作业过程中产生环境污染。原料的浪费:因为是人工完成的作业,所以现场避免不了产生浪费,没有量化的合理安排纯粹靠经验,肯定会出现多料少料的情况,都是混凝土罐车在现场,现场出现不可控情况耽误作业时,避免不了的要进行倒罐,不然混凝土车凝罐情况产生,损失更大,也不符合政策提倡的绿色环保的要求;现有的地铁摊铺作业还保持了原来的人力施工,在滑模摊铺机械施工上是一个空白。
3、因此,发明一种铁双全站仪智能控制滑模摊铺系统来解决上述问题很有必要。
技术实现思路
1、本发明的目的在于提供一种地铁双全站仪智能控制滑模摊铺系统,具备利用机器代替人工的优点,解决了作业效率低下、浪费人力且不环保、原料浪费和不符合政策提倡的绿色环保要求的问题。
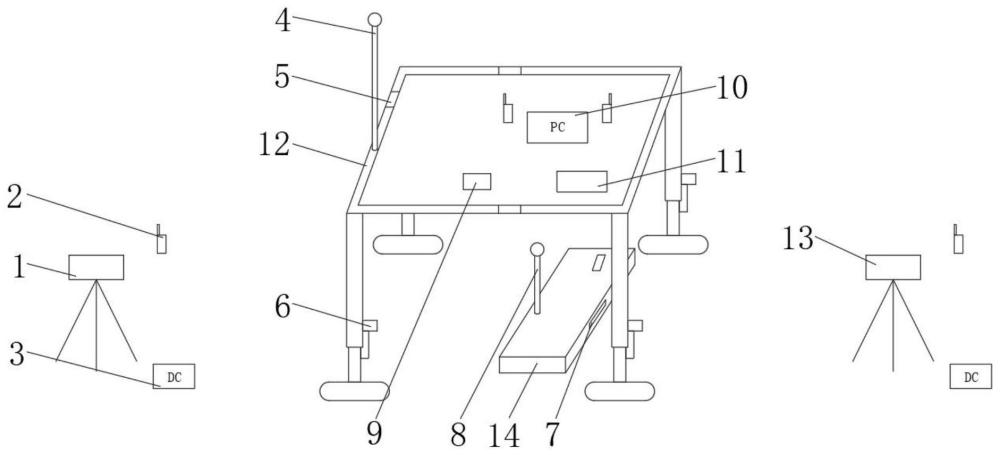
2、为实现上述目的,本发明提供如下技术方案:一种地铁双全站仪智能控制滑模摊铺系统,包括滑模摊铺机、机头端全站仪、滑模端全站仪和滑模模块,所述滑模摊铺机顶部左侧的中心处安装有机头端棱镜,所述滑模模块顶部左侧的中心处安装有滑模端棱镜,所述滑模摊铺机的底部固定连接有液压升降腿,液压升降腿的右侧安装有拉绳传感器,所述模摊铺机的顶部分别安装有控制盒、工业电脑和滑模摊铺机操作面板,所述滑模摊铺机的顶部和滑模模块的顶部均安装有倾角传感器,所述滑模模块的右侧安装有测距传感器。
3、优选的,液压升降腿的数量为四个,且四个液压升降腿分别位于滑模摊铺机底部的四角,拉绳传感器的左侧与液压升降腿右侧的固定端固定连接。
4、优选的,所述滑模摊铺机顶部安装的倾角传感器的数量为三个,且三个倾角传感器分别位于滑模摊铺机顶部的左侧、前侧和后侧。
5、优选的,所述滑模模块位于滑模摊铺机的下方,所述机头端全站仪和滑模端全站仪分别位于滑模摊铺机的左右两侧
6、优选的,所述机头端全站仪和滑模端全站仪的输入端均电连接有外接电源,所述外接电源为12v、8ah的红电池。
7、优选的,所述机头端全站仪、滑模端全站仪和工业电脑均信号连接有无线电台,所述滑模摊铺机顶部的无线电台数量为两个,且分别位于工业电脑的左右两侧,所述无线电台的数量为四个。
8、优选的,液压升降腿的底部固定连接有支撑垫块,支撑垫块的底部开设有防滑条纹。
9、优选的,所述控制盒和滑模摊铺机操作面板位于工业电脑的前侧,所述控制盒位于滑模摊铺机操作面板的左侧。
10、与现有技术相比,本发明的有益效果如下:
11、本发明通过机头端全站仪、无线电台、外接电源、机头端棱镜、倾角传感器、拉绳传感器、测距传感器、滑模端棱镜、控制盒、工业电脑、滑模摊铺机操作面板、滑模摊铺机、滑模端全站仪和滑模模块配合使用,具有利用机器代替人工的优点,无需多人的同时施工,节约了人力资源,不会造成大量的物料浪费,同时保护了环境。
技术特征:
1.一种地铁双全站仪智能控制滑模摊铺系统,包括滑模摊铺机(12)、机头端全站仪(1)、滑模端全站仪(13)和滑模模块(14),其特征在于:所述滑模摊铺机(12)顶部左侧的中心处安装有机头端棱镜(4),所述滑模模块(14)顶部左侧的中心处安装有滑模端棱镜(8),所述滑模摊铺机(12)的底部固定连接有液压升降腿,液压升降腿的右侧安装有拉绳传感器(6),所述模摊铺机(12)的顶部分别安装有控制盒(9)、工业电脑(10)和滑模摊铺机操作面板(11),所述滑模摊铺机(12)的顶部和滑模模块(14)的顶部均安装有倾角传感器(5),所述滑模模块(14)的右侧安装有测距传感器(7)。
2.根据权利要求1所述的一种地铁双全站仪智能控制滑模摊铺系统,其特征在于:液压升降腿的数量为四个,且四个液压升降腿分别位于滑模摊铺机(12)底部的四角,拉绳传感器(6)的左侧与液压升降腿右侧的固定端固定连接。
3.根据权利要求1所述的一种地铁双全站仪智能控制滑模摊铺系统,其特征在于:所述滑模摊铺机(12)顶部安装的倾角传感器(5)的数量为三个,且三个倾角传感器(5)分别位于滑模摊铺机(12)顶部的左侧、前侧和后侧。
4.根据权利要求1所述的一种地铁双全站仪智能控制滑模摊铺系统,其特征在于:所述滑模模块(14)位于滑模摊铺机(12)的下方,所述机头端全站仪(1)和滑模端全站仪(13)分别位于滑模摊铺机(12)的左右两侧。
5.根据权利要求1所述的一种地铁双全站仪智能控制滑模摊铺系统,其特征在于:所述机头端全站仪(1)和滑模端全站仪(13)的输入端均电连接有外接电源(3),所述外接电源(3)为12v、8ah的红电池。
6.根据权利要求1所述的一种地铁双全站仪智能控制滑模摊铺系统,其特征在于:所述机头端全站仪(1)、滑模端全站仪(13)和工业电脑(10)均信号连接有无线电台(2),所述滑模摊铺机(12)顶部的无线电台(2)数量为两个,且分别位于工业电脑(10)的左右两侧,所述无线电台(2)的数量为四个。
7.根据权利要求1所述的一种地铁双全站仪智能控制滑模摊铺系统,其特征在于:液压升降腿的底部固定连接有支撑垫块,支撑垫块的底部开设有防滑条纹。
8.根据权利要求1所述的一种地铁双全站仪智能控制滑模摊铺系统,其特征在于:所述控制盒(9)和滑模摊铺机操作面板(11)位于工业电脑(10)的前侧,所述控制盒(9)位于滑模摊铺机操作面板(11)的左侧。
技术总结
本发明公开了一种地铁双全站仪智能控制滑模摊铺系统,包括滑模摊铺机、机头端全站仪、滑模端全站仪和滑模模块,所述滑模摊铺机顶部左侧的中心处安装有机头端棱镜,所述滑模模块顶部左侧的中心处安装有滑模端棱镜,所述滑模摊铺机的底部固定连接有液压升降腿,液压升降腿的右侧安装有拉绳传感器。本发明通过机头端全站仪、无线电台、外接电源、机头端棱镜、倾角传感器、拉绳传感器、测距传感器、滑模端棱镜、控制盒、工业电脑、滑模摊铺机操作面板、滑模摊铺机、滑模端全站仪和滑模模块配合使用,具有利用机器代替人工的优点,无需多人的同时施工,节约了人力资源,不会造成大量的物料浪费,同时保护了环境。
技术研发人员:刘耀强,王飞飞,李晓鹏,张乐华,杜昆,韩强,文竹,刘卫红,郑吉泰,李蕊
受保护的技术使用者:中铁一局集团有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!