一种道路桥梁施工校准智能控制系统的制作方法
本发明属于道路桥梁施工检测,尤其涉及一种道路桥梁施工校准智能控制系统。
背景技术:
1、道路桥梁在人类文明的发展过程中占据着重要的地位,随着交通领域的发展,道路桥梁建设空前繁荣,施工团队面临着如何在保证施工质量的同时提高施工效率的技术难题。
2、现有测试道路桥梁路面的直度、水平度或规定倾斜坡度的方法,均是通过人工测绘方式在施工前标定施工区域,容易出现测量偏差而导致施工偏离预期路径影响施工质量。并且,人工测绘的方式无法实时跟进测量施工设备的施工精度,容易造成误差累积。这种施工方式不但浪费大量人工,还缺乏在施工过程中及时校准和修正施工方向的能力,需要通过返工来弥补,增加了大量物料成本、人工成本、设备运行成本和时间成本,严重影响施工效率。
3、因此,需要一种施工校准智能控制系统,在施工过程中智能控制施工设备对直度、水平度或倾斜坡度等参数进行及时的校准纠正。
技术实现思路
1、本发明的目的在于,提供一种道路桥梁施工校准智能控制系统,在施工过程中智能控制施工设备对直度、水平度或倾斜坡度等参数进行及时的校准纠正。
2、本发明是通过以下技术方案实现的:
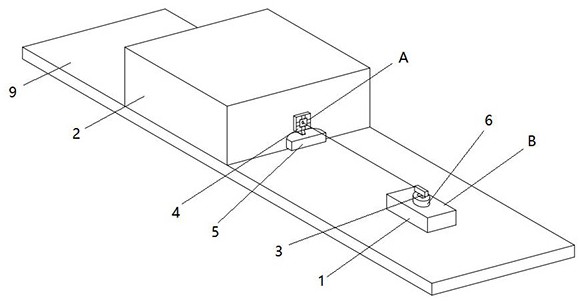
3、一种道路桥梁施工校准智能控制系统,包括安装有发射组件的行走机器人、安装在施工设备上的接收组件和控制终端;所述控制终端分别与行走机器人、接收组件和施工设备的操作终端通信连接;
4、所述行走机器人在施工设备经过的区域内沿预设的标准路径行驶,所述发射组件发射的激光束投射于所述接收组件上形成光斑,所述接收组件感应光斑的位置并将光斑与接收组件中心处的偏差距离数据和偏差方向数据上传控制终端,所述控制终端依据偏差距离数据和偏差方向数据向施工设备的操作终端发送修正指令。
5、优选的,还包括分别与所述控制终端通信连接的bim模组、第一定位模块和第二定位模块,所述第一定位模块安装于所述接收组件上,所述第二定位模块安装于发射组件上;
6、所述bim模组内置有预期模型和施工进度模型,两定位模块将定位坐标上传至控制终端,所述控制终端与所述bim模组数据互通以更新所述bim模组中的施工进度模型,并且通过预期模型与施工进度模型的比对获取宏观偏差参数,所述控制终端依据宏观偏差参数对施工设备的操作终端和行走机器人发送路线修正指令。
7、优选的,所述控制终端指令所述行走机器人与施工设备保持相同速度行驶;所述发射组件与所述接收组件配合构成激光束测距结构,用以测量行走机器人与施工设备之间的距离并上传所述控制终端,所述控制终端指令施工设备的操作终端或行走机器人调节速度保持距离恒定。
8、优选的,所述接收组件与施工设备之间通过接收基座连接,所述发射组件与所述行走机器人之间通过发射基座连接;两基座均包括旋转盘和驱动组件,所述驱动组件与所述控制终端通信连接,所述驱动组件与所述旋转盘传动连接;
9、所述控制终端指令所述发射组件旋转的角度为α;所述α为在bim模组中将行走机器人的定位坐标与以该定位坐标为基准计算得出的施工设备理论位置坐标之间连线与行走机器人行进方向之间形成的夹角。
10、优选的,所述接收组件包括角度检测传感器,所述角度检测传感器与所述控制终端通信连接,所述角度检测传感器用以监测所述发射组件投射的激光束与所述接收组件的接收面之间的角度数据并上传至控制终端,所述控制终端接收角度数据并指令所述接收基座转动,以使所述发射组件投射的激光束垂直于所述接收组件的接收面。
11、优选的,所述接收组件包括中心接收面板和围绕所述中心接收面板均匀设置的若干指向接收面板,所述中心接收面板和若干指向接收面板均用于接收发射组件投射的激光束并在其表面呈现光斑;所述中心接收面板和若干指向面板均与所述控制终端通信连接。
12、优选的,所述中心接收面板的半径尺寸大于或等于施工允许的最大误差尺寸。
13、优选的,所述接收组件还包括纵向设置的第一电动分度盘,所述中心接收面板和若干指向接收面板通过所述第一电动分度盘与施工设备连接,所述第一电动分度盘与所述控制终端通信连接;
14、所述发射组件包括发射器和纵向设置的第二电动分度盘,所述发射器通过所述第二电动分度盘安装于所述行走机器人上,所述第二电动分度盘与所述控制终端通信连接;
15、所述控制终端分别指令两电动分度盘转动以保持所述发射器投射的激光束垂直照射于任一接收面板上形成光斑。
16、优选的,还包括分别与所述控制终端通信连接的第一水准仪和第二水准仪,所述第一水准仪安装于接收组件,所述第二水准仪安装于发射组件。
17、优选的,还包括安装有监察模块的无人机,所述监察模块和所述无人机均与所述控制终端通信连接,所述控制终端内预设置有工程蓝图并生成飞行巡检路径,所述控制终端指令无人机沿飞行巡检路径巡逻,所述监察模块拍摄施工现场的图像上传至控制终端,所述控制终端将施工现场的图像与工程蓝图进行比对获取空中巡检偏差数据,并依据该空中巡检偏差数据向施工设备的操作终端和行走机器人发送修正指令。
18、本发明的有益效果为:
19、这种通过行走机器人尾随施工设备作为参照基准的实时监测系统,为施工设备提供伴随移动的即时参照,当施工设备偏离预定施工范围时能够及时获取偏差距离和偏差方向并进行修正。且还可测量路面的水平度及时修正施工偏差,防止施工偏差累积造成大面积返工,严重浪费资源和耗费人力时间成本的问题。
技术特征:
1.一种道路桥梁施工校准智能控制系统,其特征在于:包括安装有发射组件的行走机器人、安装在施工设备上的接收组件和控制终端;所述控制终端分别与行走机器人、接收组件和施工设备的操作终端通信连接;
2.根据权利要求1所述道路桥梁施工校准智能控制系统,其特征在于:还包括分别与所述控制终端通信连接的bim模组、第一定位模块和第二定位模块,所述第一定位模块安装于所述接收组件上,所述第二定位模块安装于发射组件上;
3.根据权利要求2所述道路桥梁施工校准智能控制系统,其特征在于:所述控制终端指令所述行走机器人与施工设备保持相同速度行驶;所述发射组件与所述接收组件配合构成激光束测距结构,用以测量行走机器人与施工设备之间的距离并上传所述控制终端,所述控制终端指令施工设备的操作终端或行走机器人调节速度保持距离恒定。
4.根据权利要求3所述道路桥梁施工校准智能控制系统,其特征在于:所述接收组件与施工设备之间通过接收基座连接,所述发射组件与所述行走机器人之间通过发射基座连接;两基座均包括旋转盘和驱动组件,所述驱动组件与所述控制终端通信连接,所述驱动组件与所述旋转盘传动连接;
5.根据权利要求4所述道路桥梁施工校准智能控制系统,其特征在于:所述接收组件包括角度检测传感器,所述角度检测传感器与所述控制终端通信连接,所述角度检测传感器用以监测所述发射组件投射的激光束与所述接收组件的接收面之间的角度数据并上传至控制终端,所述控制终端接收角度数据并指令所述接收基座转动,以使所述发射组件投射的激光束垂直于所述接收组件的接收面。
6.根据权利要求1所述道路桥梁施工校准智能控制系统,其特征在于:所述接收组件包括中心接收面板和围绕所述中心接收面板均匀设置的若干指向接收面板,所述中心接收面板和若干指向接收面板均用于接收发射组件投射的激光束并在其表面呈现光斑;所述中心接收面板和若干指向面板均与所述控制终端通信连接。
7.根据权利要求6所述道路桥梁施工校准智能控制系统,其特征在于:所述中心接收面板的半径尺寸大于或等于施工允许的最大误差尺寸。
8.根据权利要求6所述道路桥梁施工校准智能控制系统,其特征在于:所述接收组件还包括纵向设置的第一电动分度盘,所述中心接收面板和若干指向接收面板通过所述第一电动分度盘与施工设备连接,所述第一电动分度盘与所述控制终端通信连接;
9.根据权利要求1所述道路桥梁施工校准智能控制系统,其特征在于:还包括分别与所述控制终端通信连接的第一水准仪和第二水准仪,所述第一水准仪安装于接收组件,所述第二水准仪安装于发射组件。
10.根据权利要求1所述道路桥梁施工校准智能控制系统,其特征在于:还包括安装有监察模块的无人机,所述监察模块和所述无人机均与所述控制终端通信连接,所述控制终端内预设置有工程蓝图并生成飞行巡检路径,所述控制终端指令无人机沿飞行巡检路径巡逻,所述监察模块拍摄施工现场的图像上传至控制终端,所述控制终端将施工现场的图像与工程蓝图进行比对获取空中巡检偏差数据,并依据该空中巡检偏差数据向施工设备的操作终端和行走机器人发送修正指令。
技术总结
本发明公开了一种道路桥梁施工校准智能控制系统,包括安装有发射组件的行走机器人、安装在施工设备上的接收组件和控制终端;所述控制终端分别与行走机器人、接收组件和施工设备的操作终端通信连接;所述行走机器人在施工设备经过的区域内沿预设的标准路径行驶,所述发射组件发射的激光束投射于所述接收组件上形成光斑,所述接收组件感应光斑的位置并将光斑与接收组件中心处的偏差距离数据和偏差方向数据上传控制终端,所述控制终端依据偏差距离数据和偏差方向数据向施工设备的操作终端发送修正指令。可及时修正施工偏差,避免施工偏差累积造成大面积返工,严重浪费资源和耗费人力时间成本的问题。
技术研发人员:万维,鞠三,雷尊贵,符进,潘长胜,田又强,邹强,马明洋,叶鑫朋,谢银镖
受保护的技术使用者:保利长大工程有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!