一种基于PID控制系统的钢梁顶推闭环纠偏方法及装置与流程
本发明涉及桥梁施工安全,具体涉及一种基于pid控制系统的钢梁顶推闭环纠偏方法及装置。
背景技术:
1、钢梁顶推施工是大跨度公铁钢梁桥边辅跨主梁施工的主要方式之一。施工过程中,常因钢梁顶推跨度长、梁体重量大、施工周期长,存在较高的施工安全风险高。钢梁顶推系统由液压泵站、连续千斤顶和计算机自动控制系统等多部分组成,在钢梁顶推过程中难免会出现顶推同步性问题,导致钢梁整体线性偏差,从而引起施工安全性问题。此外,由于钢梁悬臂距离较大导梁前端会出现较大挠度,从而影响顶推的顺利进行。因此,为保证钢梁顶推施工顺利安全的进行,顶推过程中需要及时对钢梁进行纠偏矫正。
2、但是,传统的施工方法一般采用滞后的纠偏方式,即当钢梁偏差较大后,采用纠偏千斤顶进行矫正,这样会存在以下问题:1)纠偏时必须暂停顶推过程,这样会影响施工进度;2)一般是产生较大的偏差后才进行纠偏处理,这样会提高纠偏的难度;3)纠偏过程中千斤顶对局部强行施加压力,这样可能导致钢梁局部凹陷破坏。4)纠偏千斤顶需要较大的外力,这样可能造成临时墩等结构的受力破坏,存在较大的安全隐患等。
技术实现思路
1、本申请提供一种基于pid控制系统的钢梁顶推闭环纠偏方法及装置,能够解决现有技术中纠偏时必须暂停顶推过程,会影响施工进度,以及难度大并且易被破坏的问题。
2、第一方面,本申请实施例提供一种基于pid控制系统的钢梁顶推闭环纠偏方法,包括以下步骤:
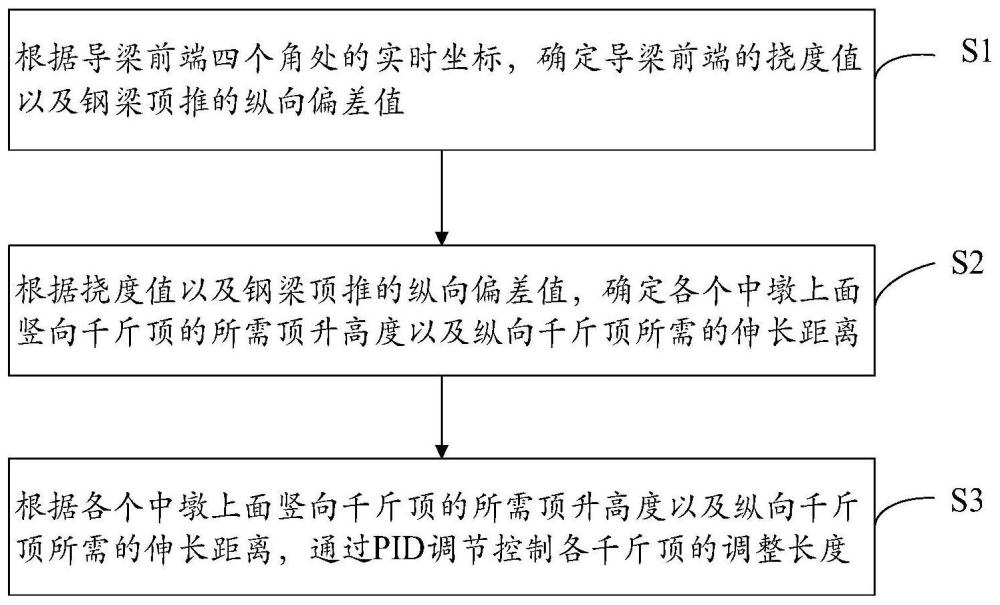
3、根据导梁前端四个角处的实时坐标,确定导梁前端的挠度值以及钢梁顶推的纵向偏差值;
4、根据挠度值以及钢梁顶推的纵向偏差值,确定各个中墩上面竖向千斤顶的所需顶升高度以及纵向千斤顶所需的伸长距离;
5、根据各个中墩上面竖向千斤顶的所需顶升高度以及纵向千斤顶所需的伸长距离,通过pid调节控制各千斤顶的调整长度。
6、在一些可选的方案中,其特征在于:
7、顶推钢梁前,在钢导梁前端的四个角点安装四个棱镜a、b、c、d作为观测点,四个观测点呈矩形布置;
8、顶推导梁时,通过全站仪机器人自动监测导梁前端的四个棱镜,获取导梁前端四个角处的实时坐标。
9、在一些可选的方案中,根据导梁前端四个角处的坐标,确定导梁前端的挠度值,包括:
10、根据导梁前端四个角处的实时竖向坐标和对应的初始竖向坐标,确定导梁前端四个角处的竖向偏差值;
11、根据导梁前端四个角处的竖向偏差值,确定导梁前端的挠度值。
12、在一些可选的方案中,根据公式δzi=zi(t)-zi(t0),确定导梁前端第i个角的竖向偏差值δzi,其中,zi(t)为t时刻导梁前端第i个角处的竖向坐标,zi(t0)为梁前端第i个角处的初始竖向坐标;
13、根据公式确定t时刻导梁前端的挠度值δz(t)。
14、在一些可选的方案中,根据公式确定t时刻钢梁顶推的纵向偏差值其中,yi(t)为t时刻第i个角处的纵向坐标。
15、在一些可选的方案中,根据挠度值,确定各个中墩上面竖向千斤顶的所需顶升高度,包括:
16、根据公式确定各个中墩上面竖向千斤顶的所需顶升高度,其中,δhi(t)为t时刻第i个中墩上面竖向千斤顶所需的顶升高度,δz(t)为t时刻导梁前端的挠度值,δy(t)为t时刻钢梁顶推的距离,li(t)为第i个顶推中墩离顶推起点的距离。
17、在一些可选的方案中,在根据各个中墩上面竖向千斤顶的所需顶升高度,通过pid调节控制各个中墩上面竖向千斤顶的调整长度时:
18、根据公式确定第i个中墩上面竖向千斤顶在tm时刻的调整长度δhi(tm),n为全站仪测量一组参数的累计次数,c1为在tm时刻第i个中墩上面竖向千斤顶的所需顶升高度δhi(tm),kp1、ki1和kd1为竖向千斤顶的pid调节系数。
19、在一些可选的方案中,在根据纵向千斤顶所需的伸长距离,通过pid调节控制纵向千斤顶的调整长度时:
20、根据公式确定外侧纵向千斤顶在tm时刻的调整长度n为全站仪测量一组参数的累计次数,c2为在tm时刻外侧纵向千斤顶所需的伸长距离kp2、ki2和kd2为纵向千斤顶的pid调节系数。
21、另一方面,本发明还提供一种基于pid控制系统的钢梁顶推闭环纠偏装置,用于实施上述任一项所述的一种基于pid控制系统的钢梁顶推闭环纠偏方法,包括:
22、偏差值确定模块,其用于根据导梁前端四个角处的实时坐标,确定导梁前端的挠度值以及钢梁顶推的纵向偏差值;
23、伸长距离确定模块,其用于根据挠度值以及钢梁顶推的纵向偏差值,确定各个中墩上面竖向千斤顶的所需顶升高度以及纵向千斤顶所需的伸长距离;
24、整长度确定模块,其用于根据各个中墩上面竖向千斤顶的所需顶升高度以及纵向千斤顶所需的伸长距离,通过pid调节控制各千斤顶的调整长度。
25、在一些可选的方案中,还包括参数获取机构,所述参数获取机构包括:
26、四个棱镜,其用于设置在钢导梁前端的四个角处,呈矩形布置,作为观测点;
27、全站仪机器人,其用于在顶推时通过自动监测导梁前端的四个棱镜,获取导梁前端四个角处的实时坐标。
28、本申请实施例提供的技术方案带来的有益效果包括:本方案通过获取导梁前端四个角处的实时坐标。根据导梁前端四个角处的实时坐标,确定导梁前端的挠度值以及钢梁顶推的纵向偏差值;根据挠度值以及钢梁顶推的纵向偏差值,确定各个中墩上面竖向千斤顶的所需顶升高度以及纵向千斤顶所需的伸长距离;根据各个中墩上面竖向千斤顶的所需顶升高度以及纵向千斤顶所需的伸长距离,通过pid调节控制各千斤顶的调整长度。通过pid调节自动调整纵向顶推单元的位移差和垂直顶推的高度值,实现钢梁顶推纠偏的闭环精准控制方法,改善了传统纠偏低效性和风险性。
技术特征:
1.一种基于pid控制系统的钢梁顶推闭环纠偏方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于pid控制系统的钢梁顶推闭环纠偏方法,其特征在于:
3.如权利要求1所述的一种基于pid控制系统的钢梁顶推闭环纠偏方法,其特征在于,根据导梁前端四个角处的坐标,确定导梁前端的挠度值,包括:
4.如权利要求1所述的一种基于pid控制系统的钢梁顶推闭环纠偏方法,其特征在于:
5.如权利要求1所述的一种基于pid控制系统的钢梁顶推闭环纠偏方法,其特征在于:
6.如权利要求1所述的一种基于pid控制系统的钢梁顶推闭环纠偏方法,其特征在于,根据挠度值,确定各个中墩上面竖向千斤顶的所需顶升高度,包括:
7.如权利要求1所述的一种基于pid控制系统的钢梁顶推闭环纠偏方法,其特征在于,在根据各个中墩上面竖向千斤顶的所需顶升高度,通过pid调节控制各个中墩上面竖向千斤顶的调整长度时:
8.如权利要求1所述的一种基于pid控制系统的钢梁顶推闭环纠偏方法,其特征在于,在根据纵向千斤顶所需的伸长距离,通过pid调节控制纵向千斤顶的调整长度时:
9.一种基于pid控制系统的钢梁顶推闭环纠偏装置,其特征在于,用于实施如权利要求1-8任一项所述的一种基于pid控制系统的钢梁顶推闭环纠偏方法,包括:
10.如权利要求9所述的一种基于pid控制系统的钢梁顶推闭环纠偏装置,其特征在于,还包括参数获取机构,所述参数获取机构包括:
技术总结
本发明涉及桥梁施工安全技术领域,具体涉及一种基于PID控制系统的钢梁顶推闭环纠偏方法及装置,该基于PID控制系统的钢梁顶推闭环纠偏方法,包括以下步骤:根据导梁前端四个角处的实时坐标,确定导梁前端的挠度值以及钢梁顶推的纵向偏差值;根据挠度值以及钢梁顶推的纵向偏差值,确定各个中墩上面竖向千斤顶的所需顶升高度以及纵向千斤顶所需的伸长距离;根据各个中墩上面竖向千斤顶的所需顶升高度以及纵向千斤顶所需的伸长距离,通过PID调节控制各千斤顶的调整长度。能够解决现有技术中纠偏时必须暂停顶推过程,会影响施工进度,以及难度大并且易被破坏的问题。
技术研发人员:王泽涛,吴巨峰,赵训刚,彭旭民,张金杯,曹士运,吕奇,王伟,刘爱林,张武,潘林,余志威,储涛
受保护的技术使用者:中铁桥研科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!