空腔结构施工电动爬升平台及其爬升方法与流程
本发明涉及建筑施工结构,尤其涉及一种空腔结构施工电动爬升平台及其爬升方法。
背景技术:
1、混凝土空腔结构有电梯井、桥塔、桥墩等,这种结构施工通常需要满足人员作业和设备运行的平台。现有的施工平台大致分为两种。第一种有悬臂模板、翻模等,采用塔吊将平台吊装到墙面预定位置,工人站在晃动的平台上将平台与预埋件固定形成稳定的受力结构。节段施工完成后,同样先用塔吊将平台拎起,人工解除与预埋件连接,塔吊将平台转移到新的节段。第二种有动力装置爬模类,在节段施工完成后,平台先用液压或电动装置将导轨提升到新节段与预埋件固结,然后平台再沿轨道爬升到新节段。
2、第一类平台高空作业安全风险高,工人需要站在摇晃不定的平台上安装平台与预埋件之间的连接螺栓。对于空腔截面尺寸变化,还需要先将平台吊装至地面,人工修改平台后再吊装至新节段安装,施工效率低。
3、桥塔桥墩空腔截面尺寸一般随高度变化,而且尺寸变化坡度也有多样。当混凝土空腔结构的墙面呈非平面的情况下,第二类平台因轨道与墙面不平行而无法爬升。这种情况,只能采用塔吊吊装至新节段重新安装平台,这种方式施工效率低下。
技术实现思路
1、本发明的主要目的在于提供一种空腔结构施工电动爬升平台及其爬升方法,旨在便于适应不同截面的空腔结构,同时其施工效率高。
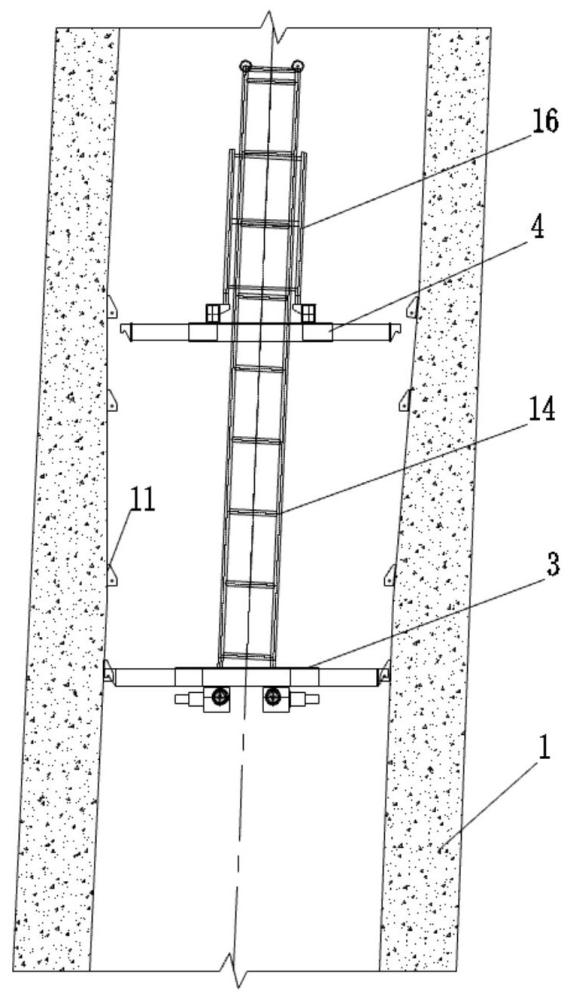
2、为实现上述目的,本发明提供一种空腔结构施工电动爬升平台,包括内桁架、外桁架、驱动机构、上支承和下支承,其中,
3、所述外桁架套于内桁架外部,内桁架与下支承连接,外桁架与上支承连接,上支承和下支承的支撑腿长度均可调节以与空腔结构内侧壁的预埋件可拆卸连接,内桁架与外桁架之间连接有驱动机构,驱动机构驱动内桁架相对于外桁架竖向移动。
4、优选地,所述驱动机构包括安装于内桁架底部的驱动电机、与驱动电机输出轴固定连接的主动轮、安装于内桁架顶端的从动轮以及套于主动轮和从动轮外部的链条,链条上固定有连接件,连接件与外桁架固定连接。
5、优选地,所述驱动电机固定于下支承的下方。
6、优选地,所述驱动电机为双轴输出电机,一内桁架配套设置有两套驱动机构。
7、优选地,所述内桁架和外桁架均采用多个标准节组成。
8、优选地,所述内桁架和外桁架的底端均通过角度调节机构分别与下支承和上支承连接,角度调节机构的高度可调整以调整内桁架和外桁架的倾斜角度。
9、优选地,相邻两所述内杆之间通过次梁连接,相邻两外套筒之间通过主连接梁连接。
10、优选地,所述内桁架包括两纵向伸缩杆,外桁架包括两横向伸缩杆,,两横向伸缩杆和两纵向伸缩杆相对设置的内杆之间通过次梁连接,两横向伸缩杆和两纵向伸缩杆相对设置的外套筒之间通过主连接梁连接。
11、优选地,所述内桁架和外桁架之间还设置有导向滚轮。
12、本发明进一步提出一种基于上述的空腔结构施工电动爬升平台的爬升方法,其特征在于,包括以下步骤:
13、将下支承的支承腿调整长度后与空腔结构内侧壁的预埋件紧固连接,将上支承的支承腿与空腔结构内侧壁的预埋件之间连接拆除;
14、驱动机构工作从而带动外桁架相对于内桁架进行爬升;
15、当外桁架爬升到位后,将上支承的支承腿调整长度后与空腔结构内侧壁的预埋件紧固连接,将下支承的支承腿与空腔结构内侧壁的预埋件之间连接拆除;
16、驱动机构工作从而带动内桁架相对于外桁架进行爬升;
17、当内桁架爬升到位后,将下支承的支承腿调整长度后与空腔结构内侧壁的预埋件紧固连接,依此循环从而实现上支承和下支承上方作业平台的爬升。
18、本发明提出的空腔结构施工电动爬升平台,通过驱动机构实现内桁架和外桁架的自动爬升,不需要吊装机构吊装,同时,本爬升平台因为上支承和下支承的支撑腿长度可调整,因此,可适应不同截面的空腔结构的爬升(也可适用于非平面的空腔结构),大大提高了本爬升平台的通用性,同时空腔结构施工电动爬升平台具有结构简单、工作稳定以及容易实现的优点。
技术特征:
1.一种空腔结构施工电动爬升平台,其特征在于,包括内桁架、外桁架、驱动机构、上支承和下支承,其中,
2.如权利要求1所述的空腔结构施工电动爬升平台,其特征在于,所述驱动机构包括安装于内桁架底部的驱动电机、与驱动电机输出轴固定连接的主动轮、安装于内桁架顶端的从动轮以及套于主动轮和从动轮外部的链条,链条上固定有连接件,连接件与外桁架固定连接。
3.如权利要求2所述的空腔结构施工电动爬升平台,其特征在于,所述驱动电机固定于下支承的下方。
4.如权利要求2所述的空腔结构施工电动爬升平台,其特征在于,所述驱动电机为双轴输出电机,一内桁架配套设置有两套驱动机构。
5.如权利要求1所述的空腔结构施工电动爬升平台,其特征在于,所述内桁架和外桁架均采用多个标准节组成。
6.如权利要求1所述的空腔结构施工电动爬升平台,其特征在于,所述内桁架和外桁架的底端均通过角度调节机构分别与下支承和上支承连接,角度调节机构的高度可调整以调整内桁架和外桁架的倾斜角度。
7.如权利要求1所述的空腔结构施工电动爬升平台,其特征在于,所述上支承和下支承均包括至少两根伸缩杆,每根伸缩杆包括位于两端的两内杆以及套于两内杆外部的外套筒,内杆形成支撑腿,内杆可插入外套筒内部,内杆的自由端与预埋件可拆卸连接。
8.如权利要求7所述的空腔结构施工电动爬升平台,其特征在于,相邻两所述内杆之间通过次梁连接,相邻两外套筒之间通过主连接梁连接。
9.如权利要求1至8中任意一项所述的空腔结构施工电动爬升平台,其特征在于,所述内桁架和外桁架之间还设置有导向滚轮。
10.一种基于权利要求1至9任意一项所述的空腔结构施工电动爬升平台的爬升方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种空腔结构施工电动爬升平台及其爬升方法。本空腔结构施工电动爬升平台包括内桁架、外桁架、驱动机构、上支承和下支承,外桁架套于内桁架外部,内桁架与下支承连接,外桁架与上支承连接,上支承和下支承的支撑腿长度均可调节以与空腔结构内侧壁的预埋件可拆卸连接,内桁架与外桁架之间连接有驱动机构,驱动机构驱动内桁架相对于外桁架竖向移动。本发明提出的空腔结构施工电动爬升平台,通过驱动机构实现内桁架和外桁架的自动爬升,不需要吊装机构吊装,本爬升平台因为上支承和下支承的支撑腿长度可调整,可适应不同截面的空腔结构的爬升,大大提高了本爬升平台的通用性,本爬升平台具有结构简单、工作稳定以及容易实现的优点。
技术研发人员:王开强,孙庆,兰晴朋,杨登,王朋,方小林,朱磊磊,曹高威
受保护的技术使用者:中建三局集团有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!