水平多关节机器人的制作方法
1.本发明涉及臂在水平方向进行动作的水平多关节机器人。
背景技术:
2.水平多关节机器人具有基座、第一臂及第二臂。水平多关节机器人在基座上具有成为第一臂的旋转轴的第一轴,在从第一轴远离的第一臂上具有成为第二臂的旋转轴的第二轴,在第二臂前端具有在垂直方向进行上下移动的第三轴及在旋转方向进行左右旋转的第四轴。
3.在水平多关节机器人中,需要将第二轴、第三轴及第四轴用的电动机线缆从基座配线至第二臂为止。
4.在专利文献1中公开了将基座和第二臂通过线缆导管连接,使电动机线缆在线缆导管内穿过的水平多关节机器人。专利文献1所公开的水平多关节机器人在第一臂的内部没有穿过电动机线缆,因此能够将臂的构造简化。
5.专利文献1:日本特开2018-130796号公报
技术实现要素:
6.在上述专利文献1所公开的水平多关节机器人中,在基座上设置第一臂,在第一臂上设置第二臂,并且在第二臂的上表面连接有线缆导管,因此与第一轴相比,第一臂的前端侧的机器人整体的高度变得更高。
7.本发明就是鉴于上述情况而提出的,其目的在于得到臂的构造简单,并且第一臂的前端侧的机器人整体的高度尺寸小于第一轴的水平多关节机器人。
8.为了解决上述的课题,并达到目的,本发明所涉及的水平多关节机器人具有:第一臂;基座,其将第一臂能够旋转地支撑;第二臂,其能够转动地支撑于第一臂;以及软管,其对将基座和第二臂连接的配线及配管的至少一者进行收容。基座具有:基座框体;第一轴用电动机,其收容于基座框体,轴从基座框体的第一面向基座框体外凸出;以及第一旋转弯头,其设置于基座框体之中的与第一面相对的第二面,端部朝向与第一轴用电动机的轴的旋转轴垂直的方向。第二臂具有:第二臂框体;第二轴用电动机,其收容于第二臂框体,轴从第二臂框体的第三面向第二臂框体外凸出;以及第二旋转弯头,其设置于第二臂框体之中的与第三面相对的第四面,端部朝向与第二轴用电动机的轴的旋转轴垂直的方向。软管将第一旋转弯头的端部和第二旋转弯头的端部连接。第二面及第四面位于同一平面。第一旋转弯头及第二旋转弯头的至少一者的旋转轴与第一轴用电动机的轴的旋转轴或第二轴用电动机的轴的旋转轴相同。
9.发明的效果
10.本发明所涉及的水平多关节机器人具有下述效果,即,臂的构造简单,并且第一臂的前端侧的机器人整体的高度尺寸小于第一轴。
附图说明
11.图1是实施方式1所涉及的水平多关节机器人的斜视图。
12.图2是实施方式1所涉及的水平多关节机器人的侧视图。
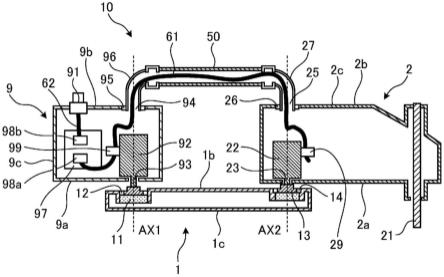
13.图3是实施方式1所涉及的水平多关节机器人的剖视图。
14.图4是实施方式1所涉及的水平多关节机器人的俯视图。
15.图5是实施方式1的变形例所涉及的水平多关节机器人的侧视图。
16.图6是实施方式2所涉及的水平多关节机器人的斜视图。
17.图7是实施方式2所涉及的水平多关节机器人的俯视图。
18.图8是实施方式2所涉及的水平多关节机器人的剖视图。
具体实施方式
19.下面,基于附图对实施方式所涉及的水平多关节机器人详细地进行说明。
20.实施方式1.
21.图1是实施方式1所涉及的水平多关节机器人的斜视图。实施方式1所涉及的水平多关节机器人10具有基座9、从基座9延伸的第一臂1、和从第一臂1延伸的第二臂2。第一臂1及第二臂2比基座9细。在第二臂2的前端部设置有对末端执行器进行安装的轴21。水平多关节机器人10在基座9上具有成为第一臂1的旋转轴的第一轴ax1,在第一臂1上具有成为第二臂2的旋转轴的第二轴ax2,在第二臂2的前端部具有使轴21上下移动的第三轴ax3及使轴21旋转的第四轴ax4。
22.图2是实施方式1所涉及的水平多关节机器人的侧视图。水平多关节机器人10在壁面70对基座9进行固定而安装。水平多关节机器人10通过设备间线缆40与机器人控制器30连接。机器人控制器30使在水平多关节机器人10配置的电动机及制动器动作。机器人控制器30经过设备间线缆40对水平多关节机器人10供给信号及电力,对水平多关节机器人10进行控制。设备间线缆40经由在基座9的上表面设置的线缆入口91而与水平多关节机器人10连接。
23.图3是实施方式1所涉及的水平多关节机器人的剖视图。基座9具有基座框体9c。基座9具有在基座框体9c中收容的第一轴用电动机92。第一轴用电动机92的轴93从基座框体9c的下表面9a向基座框体9c外凸出。基座9在基座框体9c的上表面9b形成有开口94。基座框体9c的下表面9a是轴93向基座框体9c外凸出的第一面。基座框体9c的上表面9b是与下表面9a相对的第二面。基座9具有在开口94设置的第一轴承95。基座9具有经由第一轴承95而设置于上表面9b的第一旋转弯头96。第一旋转弯头96的端部朝向与第一轴用电动机92的轴93的旋转轴垂直的方向。轴93的旋转轴与第一轴ax1相同。
24.第一臂1具有第一臂框体1c和在第一臂框体1c中收容的减速机11、13。轴93与减速机11的输入轴嵌合。减速机11的输入轴与在第一臂框体1c的上表面1b设置的轴承12的内圈嵌合。轴承12的外圈固定于第一臂框体1c。减速机11的输出轴固定于第一臂框体1c。因此,第一臂1伴随轴93的旋转而转动。
25.第一轴承95的外圈固定于开口94的缘,第一轴承95的内圈固定于第一旋转弯头96。因此,第一旋转弯头96在基座框体9c的上表面9b,能够通过与上表面9b垂直的旋转轴旋转。第一旋转弯头96的旋转轴与第一轴ax1相同。
26.第二臂2具有第二臂框体2c。另外,第二臂2具有在第二臂框体2c中收容的第二轴用电动机22。第二轴用电动机22的轴23从第二臂框体2c的下表面2a向第二臂框体2c外凸出。第二臂2在第二臂框体2c的上表面2b形成有开口25。第二臂框体2c的下表面2a是轴23向第二臂框体2c外凸出的第三面。第二臂框体2c的上表面2b是与下表面2a相对的第四面。第二臂2具有在开口25设置的第二轴承26。第二臂2具有经由第二轴承26而设置于上表面2b的第二旋转弯头27。第二旋转弯头27的端部朝向与轴23的旋转轴垂直的方向。轴23的旋转轴与第二轴ax2相同。轴23与减速机13的输入轴嵌合。减速机13的输入轴与在第一臂框体1c的上表面1b设置的轴承14的内圈嵌合。轴承14的外圈固定于第一臂框体1c。减速机13的输出轴固定于第一臂框体1c。因此,第二臂2伴随轴23的旋转而转动。
27.第二轴承26的外圈固定于开口25的边缘,第二轴承26的内圈固定于第二旋转弯头27。因此,第二旋转弯头27在第二臂框体2c的上表面2b,能够通过与上表面2b垂直的旋转轴旋转。第二旋转弯头27的旋转轴与第二轴ax2相同。
28.第一旋转弯头96的端部和第二旋转弯头27的端部通过柔性软管50连接。图4是实施方式1所涉及的水平多关节机器人的俯视图。柔性软管50比第一旋转弯头96和第二旋转弯头27之间的距离长,发生挠曲。第一旋转弯头96及第二旋转弯头27在水平方向能够改变朝向,因此柔性软管50在水平方向发生挠曲。在柔性软管50以圆弧状挠曲时,柔性软管50的箭头高度h成为小于或等于基座9的宽度的一半。因此,柔性软管50在水平方向不从基座9伸出。
29.如图3所示,在基座9的内部设置有基板97。在基板97安装有连接器98a和连接器98b,该连接器98a连接有在第一轴至第四轴的各轴的驱动用的电动机中分别穿过的配线即机内线缆61,该连接器98b连接有穿过线缆入口91的线缆62。第二轴用、第三轴用及第四轴用的机内线缆61穿过柔性软管50而从基座9拉入至第二臂2。
30.基座9具有第一夹紧件99,该第一夹紧件99将穿过柔性软管50而从基座9拉入至第二臂2的机内线缆61固定于第一轴用电动机92的侧面。另外,第二臂2具有第二夹紧件29,该第二夹紧件29将机内线缆61固定于第二轴用电动机22的侧面。即,第二轴用、第三轴用及第四轴用的机内线缆61在基座框体9c的内部,固定于第一轴用电动机92的侧面。另外,第二轴用、第三轴用及第四轴用的机内线缆61在第二臂框体2c的内部,固定于第二轴用电动机22的侧面。第二轴用、第三轴用及第四轴用的机内线缆61之中的在基座框体9c及第二臂框体2c各自的内部被固定的部位之间的部分没有被约束。此外,机内线缆61也可以固定于第一轴用电动机92的轴相反侧的端面。另外,机内线缆61也可以固定于第二轴用电动机22的轴相反侧的端面。
31.基座框体9c的上表面9b和第二臂框体2c的上表面2b位于同一平面。因此,如果第一旋转弯头96和第二旋转弯头27为相同的部件,则柔性软管50的两端的高度成为相同的高度。
32.在柔性软管50的两端的高度不同的情况下,在第一臂1及第二臂2进行动作时,绕水平轴的转矩作用于第一旋转弯头96及第二旋转弯头27,促进第一轴承95及第二轴承26的磨损。即使基座框体9c的上表面9b的高度和第二臂框体2c的上表面2b的高度不同,如果使用高度尺寸不同的第一旋转弯头96及第二旋转弯头27,则也能够使柔性软管50的两端的高度变得相同,但第一旋转弯头96和第二旋转弯头27是不同的部件,由此妨碍通过部件的通
用化而实现的部件种类的减少,并且在组装作业时需要对安装于基座框体9c的第一旋转弯头96和安装于第二臂框体2c的第二旋转弯头27进行区分,组装作业性降低。实施方式1所涉及的水平多关节机器人10通过将安装于基座框体9c的第一旋转弯头96和安装于第二臂框体2c的第二旋转弯头27设为同一部件,从而能够减少部件种类。另外,实施方式1所涉及的水平多关节机器人10无需对安装于基座框体9c的第一旋转弯头96和安装于第二臂框体2c的第二旋转弯头27进行区分,不会损害组装作业性。
33.实施方式1所涉及的水平多关节机器人10在基座9之下设置有第一臂1,在第一臂1之上设置有第二臂2。因此,与在基座之上设置第一臂、在第一臂之上设置第二臂的公知构造的水平多关节机器人相比较,与第一轴ax1相比能够减小第一臂1的前端侧的水平多关节机器人10整体的高度尺寸。
34.实施方式1所涉及的水平多关节机器人10的机内线缆61穿过柔性软管50而拉入至第二臂2,因此在第一臂1内无需设置使机内线缆61穿过的构造,能够简化基座9、第一臂1及第二臂2的构造。因此,能够使水平多关节机器人10整体的重量减少,能够使水平多关节机器人10的动作速度高速化。
35.另外,实施方式1所涉及的水平多关节机器人10的第一轴用电动机92的轴93的旋转轴和第一旋转弯头96的旋转轴相同,且第二轴用电动机22的轴23的旋转轴和第二旋转弯头27的旋转轴相同。实施方式1所涉及的水平多关节机器人10在基座框体9c内及第二臂框体2c内对机内线缆61进行固定,机内线缆61之中的穿过柔性软管50的部分没有被约束。而且,机内线缆61穿过的柔性软管50从相对于第一轴用电动机92的轴93的旋转轴及第二轴用电动机22的轴23的旋转轴各自垂直的方向与第一旋转弯头96及第二旋转弯头27连接。因此,在水平多关节机器人10的动作时,柔性软管50与第一臂1同样地动作,因此无需在机内线缆61设定机器人动作所需的富裕长度,能够实现水平多关节机器人10的轻量化及低成本化。
36.另外,实施方式1所涉及的水平多关节机器人10的柔性软管50的两端与第一旋转弯头96及第二旋转弯头27连接,因此能够按照机器人动作而左右自由地使柔性软管50挠曲。在实施方式1所涉及的水平多关节机器人10中,柔性软管50的挠曲不从第一臂1在横向伸出,因此水平多关节机器人10的动作范围不受柔性软管50的路径及长度的限制而能够自由地设定。另外,柔性软管50的挠曲方向在左右改变,由此机内线缆61的扭转部位不会固定于一处,机内线缆61的耐久性提高。
37.此外,在上述说明中,举例出使机内线缆61穿过柔性软管50的结构,但也可以使传递油压或空气压力的配管穿过柔性软管50。另外,也可以使导电的配线和传递油压或空气压力的配管这两者穿过柔性软管50。
38.另外,在上述说明中,举例出第一旋转弯头96的旋转轴与第一轴ax1相同,第二旋转弯头27的旋转轴与第二轴ax2相同的结构,但如果第一旋转弯头96的旋转轴与第一轴ax1相同,则第二旋转弯头27的旋转轴也可以不与第二轴ax2相同,如果第二旋转弯头27的旋转轴与第二轴ax2相同,则第一旋转弯头96的旋转轴也可以不与第一轴ax1相同。
39.图5是实施方式1的变形例所涉及的水平多关节机器人的侧视图。基座9可以是固定于地面80的构造。实施方式1的变形例所涉及的水平多关节机器人10在第一臂1的下方产生空间,因此在第一臂1的下方使输送机经过等,能够有效使用空间。
40.实施方式2.
41.图6是实施方式2所涉及的水平多关节机器人的斜视图。图7是实施方式2所涉及的水平多关节机器人的俯视图。图8是实施方式2所涉及的水平多关节机器人的剖视图。实施方式2所涉及的水平多关节机器人10的基座框体9c的上表面9b的对第一轴承95进行设置的开口94及第二臂框体2c的上表面2b的对第二轴承26进行设置的开口25成为长孔。另外,第一旋转弯头96的端部和第二旋转弯头27的端部通过不具有挠性的管51连接。
42.基座9的开口94的长孔在第一轴ax1的可动范围的中心方向延伸。第二臂2的开口25的长孔沿第二臂框体2c的长度方向延伸。
43.实施方式2所涉及的水平多关节机器人10的对第一轴承95进行设置的开口94及对第二轴承26进行设置的开口25为长孔,因此,通过使第一轴承95的安装位置及第二轴承26的安装位置在水平方向移动,从而能够对第一轴承95和第二轴承26之间的距离进行调整。因此,实施方式2所涉及的水平多关节机器人10能够使第一轴ax1和第二轴ax2之间的距离与穿过机内线缆61的管51的长度一致,不需要使管51挠曲。实施方式2所涉及的水平多关节机器人10不需要使用具有挠性的柔性软管,因此能够减少制造成本。
44.在上述说明中,举例出基座框体9c的上表面9b的开口94及第二臂2的上表面2b的开口25为长孔的结构,但如果开口94为长孔,则开口25也可以不是长孔,如果开口25是长孔,则开口94也可以不是长孔。
45.以上的实施方式所示的结构,表示内容的一部分,也能够与其他公知技术进行组合,在不脱离主旨的范围,也能够对结构的一部分进行省略、变更。
46.标号的说明
47.1第一臂,1b、2b、9b上表面,1c第一臂框体,2第二臂,2a、9a下表面,2c第二臂框体,9基座,9c基座框体,10水平多关节机器人,11、13减速机,12、14轴承,21、23、93轴,22第二轴用电动机,25、94开口,26第二轴承,27第二旋转弯头,29第二夹紧件,30机器人控制器,40设备间线缆,50柔性软管,51管,61机内线缆,62线缆,70壁面,80地面,91线缆入口,92第一轴用电动机,95第一轴承,96第一旋转弯头,97基板,98a、98b连接器,99第一夹紧件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1