一种提供助力保持的上肢助力外骨骼机器人
1.本发明属于外骨骼机器人技术领域,更为具体地讲,涉及一种提供助力保持的上肢助力外骨骼机器人。
背景技术:
2.我国是制造业大国,但进入21世纪我国就逐渐步入人口老龄化,众多企业缺乏足够的劳动力来完成相应的体力工作。尽管自动化程度不断提高,但部分领域自动化程度进展缓慢,尤其是在加工装配、交通运输及物资运输等。在此类人工作业过程中,作业人员长时间涉及过顶运动、长时间过顶等高强度工作,较易出现体能降低、肌肉疲劳等情况、严重影响作业效率。因此即时改善作业人员的作业环境、提高作业人员的身体素质与体能对我国工业化进程具有较大现实意义。
3.目前由于机器人技术和人机协同技术的发展,外骨骼机器人被较好应用于辅助人工作业。外骨骼机器人能够在多场景下为人体各关节提供相应助力,缓解高强度工作带来的肌肉疲劳,较好的解决了人工作业面临的肌肉损伤问题。基于现有研究技术,本发明提供了一种可提供助力保持的无源上肢助力外骨骼机器人,能够为作业人员的上肢在过顶运动以及搬运作业时提供相应的助力保持,降低作业疲劳,提高工作效率。
4.经对现有技术文献检索发现:
5.中国专利(申请号:201610052248.1)基于双平行四边形重力平衡原理的变负载上肢助力外骨骼。该专利主要提供了一种利用平行四边形原理,对角线固连工业弹簧,可以以此平衡重力的上肢助力外骨骼,并且其采用双杆件的形式,能够适应人体上肢关节的运动,能够实现较重的重物的搬运。但该专利提供的上肢助力外骨骼整体较重,关节活动不便,难以实现高频次的搬运作业,且该上肢助力外骨骼前端为抓钩形式,只能适应部分形状或者是特定的重物,难以像人手一般适应较多形式的重物。
6.中国专利(申请号:202023110633.8)一种上肢外骨骼助力装置。该专利提供了一种拉线式的有源助力外骨骼,能够在搬运作业时为人体腕部提供相应助力。主要通过左右悬挂的弹性绳和挂钩勾起重物,整体结构较为简易。但该专利结构较为单一,不能够适应人体正常的活动范围,重物的抓取过程也较为繁琐,实际识别率较低,不能够实时为人体上肢提供助力。
技术实现要素:
7.本发明的目的在于克服现有技术的不足,提供一种提供助力保持的上肢助力外骨骼机器人,为工业场景下的作业人员的上肢提供助力保持。
8.为实现上述发明目的,本发明一种提供助力保持的上肢助力外骨骼机器人,其特征在于,包括:肩部助力模块、肩关节运动自适应机构、肩高调节机构、肩宽调节块、上肢绑缚、背靠、腰部绑缚;
9.所述肩部助力模块在作业维持中为人体肩关节活动提供各个角度的助力,具体包
括上壳体、下壳体、凸轮阶梯轴、锁定开关、氮气弹簧、轴承-1、树脂垫片、凸轮接触块、转动阶梯轴、偏心凸轮、凸轮轴套、凸轮销轴、凸轮接触块销轴、氮气弹簧挡块、轴承-2、轴承-3、轴承-4;
10.上壳体和下壳体设置有锁定开关安装孔、轴承安装孔和固定连接孔,其中,上壳体和下壳体均设置两个轴承安装孔,分别标记为第一轴承安装孔和第二轴承安装孔;轴承-1通过上壳体上的第一轴承安装孔进行过盈配合固连,轴承-3通过上壳体上的第二轴承孔过盈配合固连;轴承-2通过下壳体上的第一轴承安装孔进行过盈配合固连,轴承-4通过下壳体上的第二轴承安装孔过盈配合固连;上壳体和下壳体之间通过固定连接孔用螺栓固连;
11.锁定开关两端均套有树脂垫片,再与锁定开关内侧阶梯台的两个端面紧密贴合;锁定开关通过锁定开关安装孔固定在上壳体和下壳体间,实现锁定开关轴向固定且能够自由转动;
12.凸轮阶梯轴与肩关节运动自适应机构中的范围调节连接块通过螺栓固连,实现肩部助力模块与肩关节运动自适应机构的固连;
13.其中,凸轮阶梯轴共有两段阶梯,偏心凸轮套在凸轮阶梯轴上,且偏心凸轮的一侧端面紧贴凸轮阶梯轴第二个阶梯的端面;偏心凸轮与凸轮阶梯轴均设有销轴孔,凸轮销轴分别与偏心凸轮和凸轮阶梯轴通过过盈配合固连,由此实现偏心凸轮与凸轮阶梯轴的固连;凸轮轴套套在凸轮阶梯轴上,且凸轮轴套的一侧端面紧贴偏心凸轮另一侧端面;随后将凸轮阶梯轴套有凸轮轴套一侧与轴承-2通过过盈配合固连,凸轮阶梯轴另一侧与轴承-1通过过盈配合固连,且紧贴凸轮阶梯轴第一个阶梯的端面,整体实现轴向固定,当凸轮阶梯轴实现自由转动时带动偏心凸轮转动;
14.凸轮接触块套在转动阶梯轴上,且凸轮接触块的一侧端面紧贴转动阶梯轴109的阶梯一侧端面上,树脂垫片套在转动阶梯轴上,且树脂垫片一侧端面与凸轮接触块另一侧端面紧密贴合,随后转动阶梯轴套有树脂垫片的一侧与轴承-3通过轴承安装孔进行过盈配合固连,转动阶梯轴的另一侧与轴承-4通过过盈配合固连,这样转动阶梯轴实现轴向固定且能自由转动;
15.凸轮接触块中间设有销轴孔和槽口,凸轮接触块与凸轮接触块销轴通过过盈配合固连,凸轮接触块曲面端面处与偏心凸轮表面紧密接触,凸轮接触块曲面和偏心凸轮端面较为粗糙;氮气弹簧挡块与凸轮接触块销轴间隙配合,使氮气弹簧挡块可在凸轮接触块槽口内实现-30度至30度的范围转动,氮气弹簧挡块的下端面与氮气弹簧紧密贴合,氮气弹簧再通过螺栓与下壳体固定连接,这样氮气弹簧产生的推力传递给氮气弹簧挡块和凸轮接触块;
16.所述肩关节运动自适应机构分为六段,其中,第一段包括范围调节连接块、固定阶梯螺栓、弹性树脂垫片;第二段包括自适应调节块、弹性树脂垫片、固定阶梯螺栓;第三段到第六段包括自适应调节块、弹性树脂垫片、固定螺钉;
17.在第一段中,固定阶梯螺栓穿过范围调节连接块的贯穿沉孔,穿过贯穿沉孔后套上弹性树脂垫片,再与第二段的自适应调节块连接;
18.在第二段中,固定阶梯螺栓穿过自适应调节块的贯穿沉孔,穿过沉孔后套上弹性树脂垫片,再与第三段的自适应调节块连接;
19.第三段到第五段的连接方式相同,都是固定螺钉穿过自适应调节块的贯穿沉孔,
穿过沉孔后套上弹性树脂垫片,再与下一段中的自适应调节块连接;
20.在第六段中,固定螺钉穿过自适应调节块的贯穿沉孔,穿过沉孔后套上弹性树脂垫片,再与肩高调节机构的自适应机构连接块连接;
21.所述肩高调节机构包括自适应机构连接块、固定套筒、v型固定弹簧、调节套筒;
22.自适应机构连接块与固定套筒通过螺栓固连,固定套筒设有连续通孔,调节套筒的上下两端均通过固定胶水固连一v型固定弹簧,上端的v型固定弹簧通过伸缩的方式通过连续通孔,从而使调节套筒在固定套筒内侧自由滑动,进而实现肩高调节;
23.所述肩宽调节块带有弹簧槽口,肩高调节机构的下端v型固定弹簧嵌于弹簧槽口内,实现肩高调节机构与肩宽调节块的固连;此外,肩宽调节块共有两档肩宽调节,下端v型固定弹簧能在两档肩宽调节间切换,实现肩宽调节;
24.所述上肢绑缚与肩部助力模块通过螺栓固连,上肢助力外骨骼机器人使用时,通过上肢绑缚上的绑缚带将肩部助力模块构穿戴于作业人员的大臂上,包裹住作业人员的整个手臂;
25.所述背靠与肩高调节机构通过螺栓固连,用于保护作业人员背部;
26.所述腰部绑缚与肩宽调节块通过螺栓固连,用于将整体上肢外骨骼机器人固定在作业人员的腰部;
27.本发明的发明目的是这样实现的:
28.本发明一种提供助力保持的上肢助力外骨骼机器人,当作业人员穿戴好上肢助力外骨骼机器人后,作业人员正常工作,上肢运动过程中带动偏心凸轮转动,产生位移,从而拉动氮气弹簧产生推力,并传递给氮气弹簧挡块和凸轮接触块;又因凸轮接触块和偏心凸轮表面粗糙,氮气弹簧的推力下接触后产生较大摩擦力,由此产生反向力矩,反向力矩作用在作业人员上肢,与过顶作业中的工具对肩部产生的力矩相反,实现实时的助力保持。
29.同时,本发明一种提供助力保持的上肢助力外骨骼机器人还具有以下有益效果:
30.(1)、本发明能够实时提供助力力矩,助力力矩大小可根据自身需求更换。肩部助力模块为本发明提供助力力矩主要功能机构,其主要通过偏心凸轮于凸轮接触块的接触摩擦力和偏心凸轮产生的偏心力臂所产生的力矩为人体上肢提供助力,在肩部助力模块一定的情况下,可以通过自行跟换氮气弹簧改变接触表面的压力,从而改变摩擦力大小,实现按需助力。
31.(2)、本发明实现有无助力的自行选择。凸轮接触块前端设有阻挡阶梯,锁定开关可嵌于阶梯内以阻碍凸轮接触块与偏心凸轮接触,以此实现自行选择有助力模式与无助力模式。
32.(3)、本发明具备较强适应性与人机相容性,能够适应160-185cm身高人群。本发明具备肩部调节与肩高调节模块,实现有级调节,且具备自适应机构,补偿人体肩关节的实际运动产生的位移,人机相容行较好。
33.(4)、本发明在低成本、兼容性好、安装简单、操作简便方面具有优势,可实现多工业场景的推广。
附图说明
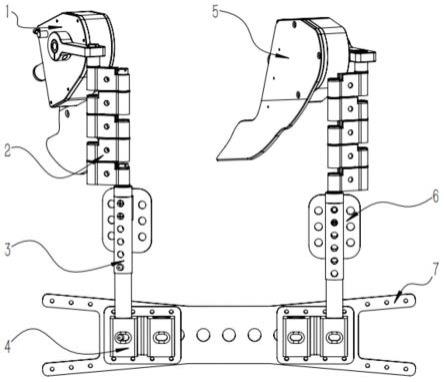
34.图1是本发明一种提供助力保持的上肢助力外骨骼机器人一种具体实施方式架构
图;
35.图2是肩部助力模块的结构示意图;其中,(a)是肩部助力模块整体示意图,(b)是打开上壳体后的示意图;(c)是锁定开关安装示意图;(d)是偏心凸轮安装示意图;(e)是转动阶梯轴安装示意图;(f)是氮气弹簧挡块安装示意图;
36.图3是上壳体和下壳体的结构示意图;其中,(a)是上壳体的结构示意图,(b)是下壳体的结构示意图;
37.图4是肩部助力模块与肩关节运动自适应机构的连接示意图;
38.图5是肩部助力模块各部件的结构示意图;其中,(a)是凸轮阶梯轴的结构示意图,(b)是转动阶梯轴的结构示意图,(c)是锁定开的结构示意图,(d)是凸轮接触块的结构示意图;
39.图6是肩关节运动自适应机构的结构示意图;其中,(a)是肩关节运动自适应机构的分段示意图,(b)是肩关节运动自适应机构与肩高调节机构的连接示意图;
40.图7是自适应调节块的结构示意图;
41.图8是肩高调节机构的结构示意图;
42.图9是肩高调节机构的剖视图;
43.图10是肩高调节机构与肩宽调节块的连接示意图;
44.图11是肩部助力模块的力矩产生原理图。
具体实施方式
45.下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
46.实施例
47.图1是本发明一种提供助力保持的上肢助力外骨骼机器人一种具体实施方式架构图。
48.在本实施例中,如图1所示,本发明一种提供助力保持的上肢助力外骨骼机器人,包括:肩部助力模块1、肩关节运动自适应机构2、肩高调节机构3、肩宽调节块4、上肢绑缚5、背靠6、腰部绑缚7;
49.肩部助力模块1用于为肩关节提供助力保持,其能够在人体肩关节活动范围内的各个角度提供助力保持,即在上肢运动过程不提供连续助力,但在作业维持中提供保持力矩,如图2所示,具体包括上壳体101、下壳体102、凸轮阶梯轴103、锁定开关104、氮气弹簧105、轴承-1 106、树脂垫片107、凸轮接触块108、转动阶梯轴109、偏心凸轮110、凸轮轴套111、凸轮销轴112、凸轮接触块销轴113、氮气弹簧挡块114、轴承-2 115、轴承-3 116、轴承-4 117;其中,图2(a)为肩部助力模块的整体示意图,打开上壳体101后,肩部助力模块的内部结构如图2(b)所示;
50.上壳体101和下壳体102设置有锁定开关安装孔、轴承安装孔和固定连接孔,其中,上壳体101和下壳体102均设置两个轴承安装孔,分别标记为第一轴承安装孔和第二轴承安装孔;如图3(a)所示,1011是上壳体101上的第一轴承安装孔,1012是上壳体101上的第二轴承孔,1013是上壳体101上的锁定开关的安装孔;如图3(b)所示,1021是下壳体102上的第一
轴承安装孔,1022是下壳体102上的第二轴承安装孔,1023是下壳体102上的锁定开关的安装孔,1024是下壳体102上的氮气弹簧的安装孔位;
51.轴承-1 106通过上壳体101上的第一轴承安装孔进行过盈配合固连,轴承-3116通过上壳体101上的第二轴承孔过盈配合固连;轴承-2 115通过下壳体102上的第一轴承安装孔进行过盈配合固连,轴承-4 117通过下壳体102上的第二轴承安装孔过盈配合固连;上壳体101和下壳体102之间通过固定连接孔用螺栓固连;
52.如图2(c)所示,锁定开关104两端均套有树脂垫片107,再与锁定开关内侧阶梯台的两个端面紧密贴合;锁定开关104通过锁定开关安装孔固定在上壳体和下壳体间,实现锁定开关104的轴向固定且能够自由转动,其中,锁定开关104如图5(c)所示;
53.如图4所示,凸轮阶梯轴103与肩关节运动自适应机构2中的范围调节连接块201通过螺栓固连,实现肩部助力模块1与肩关节运动自适应机构2的固连,其可根据实际场景需求调节固连角度,以此实现运动范围的选择,以适应不同的作业场景;
54.其中,凸轮阶梯轴103共有两段阶梯,如图5(a)所示,其中,1031是凸轮销轴安装孔,1032是第一段阶梯,1033是第二段阶梯;偏心凸轮110套在凸轮阶梯轴103上,且偏心凸轮110的一侧端面紧贴凸轮阶梯轴第二个阶梯的端面;如图2(d)所示,偏心凸轮110与凸轮阶梯轴103均设有销轴孔,凸轮销轴112分别与偏心凸轮110和凸轮阶梯103轴通过过盈配合固连,由此实现偏心凸轮110和凸轮阶梯103的固连;凸轮轴套111套在凸轮阶梯轴103上,且凸轮轴套111的一侧端面紧贴偏心凸轮另一侧端面;随后将凸轮阶梯轴103套有凸轮轴套111一侧与轴承-2 115通过过盈配合固连,凸轮阶梯轴另一侧与轴承-1 106通过过盈配合固连,且紧贴凸轮阶梯轴第一个阶梯的端面,整体实现轴向固定,当凸轮阶梯轴103实现自由转动时带动偏心凸轮110转动;
55.如图2(e)所示,凸轮接触块108套在转动阶梯轴109上,且凸轮接触块108的一侧端面紧贴转动阶梯轴109的阶梯一侧端面上,树脂垫片107套在转动阶梯轴上,且树脂垫片107一侧端面与凸轮接触块108另一侧端面紧密贴合,随后转动阶梯轴109套有树脂垫片107的一侧与轴承-3 116通过轴承安装孔进行过盈配合固连,转动阶梯轴109的另一侧与轴承-4 117通过过盈配合固连,这样转动阶梯轴109实现轴向固定且能自由转动;其中,转动阶梯轴109如图5(b)所示;凸轮接触块108如图5(d)所示,其中,1081是销轴安装孔,1082是凸轮接触块槽口;
56.如图2(f)所示,凸轮接触块108中间设有销轴孔和槽口,凸轮接触块108与凸轮接触块销轴113通过过盈配合固连,凸轮接触块108曲面端面处与偏心凸轮110表面紧密接触,凸轮接触块108的曲面和偏心凸轮端面粗糙;氮气弹簧挡块114与凸轮接触块销轴113间隙配合,使氮气弹簧挡块114可以在凸轮接触块108的槽口内实现-30度至30度的范围转动,氮气弹簧挡块114的下端面与氮气弹簧105紧密贴合,氮气弹簧105再通过螺栓与下壳体102固定连接,这样氮气弹簧105产生的推力传递给氮气弹簧挡块114和凸轮接触块108,穿戴者可根据需求自行更换不同规格的氮气弹簧;
57.如图6(a)所示,肩关节运动自适应机构2分为六段,其中,第一段包括范围调节连接块201、固定阶梯螺栓202、弹性树脂垫片203;第二段包括自适应调节块205、弹性树脂垫片203、固定阶梯螺栓202;第三段到第六段包括自适应调节块205、弹性树脂垫片203、固定螺钉204;其中,自适应调节块205如图7所示,其中,2051是贯穿沉孔,2052是内螺纹空;
58.在第一段中,固定阶梯螺栓202穿过范围调节连接块201的贯穿沉孔,穿过贯穿沉孔后套上弹性树脂垫片203,再与第二段的自适应调节块205连接;
59.在第二段中,固定阶梯螺栓202穿过自适应调节块205的贯穿沉孔,穿过沉孔后套上弹性树脂垫片203,再与第三段的自适应调节块205连接;
60.第三段到第五段的连接方式相同,都是固定螺钉204穿过自适应调节块205的贯穿沉孔,穿过沉孔后套上弹性树脂垫片203,再与下一段中的自适应调节块连接;
61.在第六段中,如图6(b)所示,固定螺钉204穿过自适应调节块205的贯穿沉孔,穿过沉孔后套上弹性树脂垫片203,再与肩高调节机构3的自适应机构连接块301连接,这样可以使整个肩关节运动自适应机构随人体肩关节运动实现100mm圆形范围内自适应转动;
62.如图8所示,肩高调节机构3包括自适应机构连接块301、固定套筒302、v型固定弹簧303、调节套筒304;
63.如图9所示,自适应机构连接块301与固定套筒302通过螺栓固连,固定套筒302设有连续通孔,调节套筒304的上下两端均通过固定胶水固连一v型固定弹簧303,上端的v型固定弹簧303通过伸缩的方式通过连续通孔,从而使调节套筒304在固定套筒302内侧自由滑动,进而实现肩高调节;
64.如图10所示,肩宽调节块4带有弹簧槽口,肩高调节机构3的下端v型固定弹簧303嵌于弹簧槽口内,实现肩高调节机构3与肩宽调节块4的固连;此外,肩宽调节块4共有两档肩宽调节,下端v型固定弹簧303能在两档肩宽调节间切换,实现肩宽调节;
65.上肢绑缚5与肩部助力模块1通过螺栓固连,上肢助力外骨骼机器人使用时,通过上肢绑缚5上的绑缚带将肩部助力模块构穿戴于作业人员的大臂上,包裹住作业人员的整个手臂;
66.背靠6与肩高调节机构3通过螺栓固连,用于保护作业人员背部;
67.腰部绑缚7与肩宽调节块4通过螺栓固连,用于将整体上肢外骨骼机器人固定在作业人员的腰部;
68.当作业人员穿戴好上肢助力外骨骼机器人后,作业人员正常工作,上肢运动过程中带动偏心凸轮转动,产生位移,从而拉动氮气弹簧产生推力,并传递给氮气弹簧挡块和凸轮接触块;又因凸轮接触块和偏心凸轮表面粗糙,氮气弹簧的推力下接触后产生较大摩擦力,由此产生反向力矩,反向力矩作用在作业人员上肢,实现实时的助力保持。
69.在本实施例中,氮气弹簧的推力通过机构传导至凸轮接触块处,如图11中下端箭头所示,推力垂直于偏心凸轮与凸轮接触块接触面,偏心凸轮基圆圆心垂直于推力的距离为力臂,如果存在偏心凸轮和凸轮接触块产生相对移动,那它们之间会产生反向滑动摩擦力。假设现在偏心凸轮受到一个主动转矩为m开始转动,则此时便会产生一个摩擦力,由此产生一个反向力矩,氮气弹簧大小选型决定推力大小,因此可以通过更换氮气弹簧型号改变助力力矩大小。只要偏心凸轮受到来自手臂的主动扭矩,便会产生摩擦力,由此便会产生反向扭矩支撑穿戴者的手臂,实现实时的助力保持。
70.尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1