试衣机器人
1.本发明涉及仿生机器人技术领域,尤其涉及一种试衣机器人。
背景技术:
2.现有的试衣方式主要包括两大类:
3.1、远程线下试衣:通过计算机网络技术和视觉交互技术对消费者的照片进行分析或者由消费者直接告知工作人员相关特征部位的具体尺寸,由触摸屏直接输入的方式,控制机器人调整相关尺寸,从而达到远程试衣的效果。相关机器人有通过丝杠-电机作为控制的主体机构,也有通过气囊气泵作为控制的主体机构,由丝杠-电机控制的机器人结构较为紧凑,使用电机较多,成本太高;使用气囊控制的机器人并没有进行对试衣机器人这一领域的尺寸精准控制,而是仅仅改变尺寸规格。
4.2、线上虚拟试衣:利用计算机网络技术和视觉交互技术通过对消费者的照片进行分析,以及对衣服照片的处理,模拟出人体穿着的仿真效果,特点是可以远程交互,比较方便,但是服装的关键点位置于人体不匹配等问题仍存在,目前没有较好的解决方案。
5.当现有技术分别具有以下问题:
6.一、线下试衣机器人
7.1、丝杠-电机的结构控制较多,结构简单,使用到的电机较多,且齿轮齿条配合较为紧凑,对于支撑材料加工的精度较高,整体结构十分紧凑,不利于装配;
8.2、气囊气泵控制的气囊需要单独设计,且电路走线较为复杂,很难加工支撑材料,仅能控制尺寸改变,无法精准控制;
9.二、线上模拟试衣
10.1、相关建模均是通过二维图片切片模拟,于实物多个地方有出入,无法做到一模一样。
11.2、对于消费者的建模也仅是模拟,特征性部位的上衣效果无法匹配消费者本身。
12.3、研发成本较高。
技术实现要素:
13.针对上述现有技术中的不足,本发明提供一种试衣机器人,利用较为简单的结构,采用旋转、曲线运动、直线运动的方式,通过较为精准的尺寸控制,达到控制机器人完成线下试衣的目的。
14.为了实现上述目的,本发明提供一种试衣机器人,包括一颈部蒙皮、一胸部蒙皮组件、一上腰部蒙皮组件、一下腰部蒙皮、一臀部蒙皮组件和三传动机构;所述胸部蒙皮组件、所述上腰部蒙皮组件和所述臀部蒙皮组件分别与一所述传动机构传动连接;所述颈部蒙皮连接于所述胸部蒙皮组件对应的所述传动机构上;所述上腰部蒙皮组件对应的所述传动机构连接于所述胸部蒙皮组件对应的所述传动机构下;所述下腰部蒙皮连接于所述上腰部蒙皮组件对应的所述传动机构下;所述臀部蒙皮组件对应的所述传动机构连接于所述上腰部
蒙皮组件对应的所述传动组件下并位于所述下腰部蒙皮下方。
15.优选地,所述传动机构包括若干蒙皮铰链、若干杆件铰链、若干杆件、一电机支座、一空轴伺服电机、一支撑主杆、一锁紧轴承、一转盘、一底座、一轴套、一从动齿轮、一角接触轴承和一主动齿轮;所述胸部蒙皮组件、所述上腰部蒙皮组件和所述臀部蒙皮组件分别连接对应的蒙皮铰链;所述蒙皮铰链与所述杆件铰链的第一端枢接;所述杆件铰链的第二端上部连接所述杆件;所述转盘沿中心形成多个弧形槽,所述杆件插设于对应的所述弧形槽内;所述底座、所述轴套、所述转盘、所述从动齿轮和所述电机支座依次自下而上套设于所述支撑主杆外;所述主杆通过所述锁紧轴承连接于所述底座的中心部;所述转盘通过螺栓连接所述从动齿轮;所述空轴伺服电机固定于所述电机支座上并与所述主动齿轮的一传动杆传动连接;所述传动杆通过所述角接触轴承连接所述电机支座;所述主动齿轮与所述从动齿轮啮合;所述底座开设有限位槽,所述限位槽对所述杆件铰链在竖直方向限位。
16.优选地,所述胸部蒙皮组件、所述上腰部蒙皮组件和所述臀部蒙皮组件分别对应的所述支撑主杆依次连接。
17.优选地,所述胸部蒙皮组件包括两后背部蒙皮、两胸部蒙皮和两肩部蒙皮;所述后背部蒙皮、所述胸部蒙皮和所述肩部蒙皮分别连接对应的所述蒙皮铰链。
18.优选地,所述上腰部蒙皮组件包括两上腰后部蒙皮、两上腰前部蒙皮和两上腰侧部蒙皮,所述上腰后部蒙皮、所述上腰前部蒙皮和所述上腰侧部蒙皮分别连接对应的所述蒙皮铰链。
19.优选地,所述臀部蒙皮组件包括两臀部蒙皮、两前腹部蒙皮和两臀侧部蒙皮;所述臀部蒙皮、所述前腹部蒙皮和所述臀侧部蒙皮分别连接对应的所述蒙皮铰链。
20.本发明由于采用了以上技术方案,使其具有以下有益效果:
21.通过传动机构采用旋转-曲线-直线的运动方式,替换丝杠-电机的旋转直线控制机构,同时通过空轴伺服电机驱动主动齿轮,从动齿轮带动转盘旋转,转盘限制杆件的行程位移完成对相关部位的尺寸控制,对外的表现形式即蒙皮结构的模特整体的尺寸发生了改变。这种结构既节约了内部空间,又节省了不必要的驱动机构和相关支撑固定支座,极大程度的降低了相关成本,材料便宜耐用,易于安装。同时操作更加方便,可以通过触摸屏或者视觉系统得到相关部位的尺寸信息,直接控制电机改变机器人相关部位的尺寸,算法简单,控制精准。
附图说明
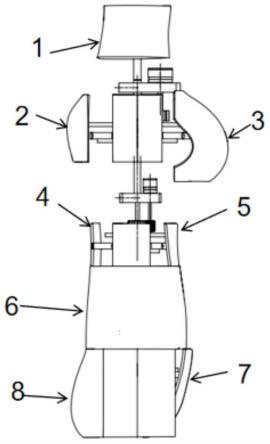
22.图1为本发明实施例的试衣机器人的侧视图;
23.图2为本发明实施例的试衣机器人的正视图;
24.图3为本发明实施例的试衣机器人的胸部的俯视图;
25.图4为本发明实施例的试衣机器人的胸部的结构示意图;
26.图5为本发明实施例的试衣机器人的上腰部的俯视图;
27.图6为本发明实施例的试衣机器人的上腰部的结构示意图;
28.图7为本发明实施例的试衣机器人的臀部的俯视图;
29.图8为本发明实施例的试衣机器人的臀部的结构示意图;
30.图9为本发明实施例的蒙皮铰链与感觉铰链的连接结构示意图;
31.图10为本发明实施例的底座与杆件铰链的连接结构俯视图;
32.图11为本发明实施例的底座与杆件铰链的连接结构示意图。
具体实施方式
33.下面根据附图图1~图11,给出本发明的较佳实施例,并予以详细描述,使能更好地理解本发明的功能、特点。
34.请参阅图1~图11,本发明实施例的一种试衣机器人,包括一颈部蒙皮1、一胸部蒙皮组件、一上腰部蒙皮组件、一下腰部蒙皮6、一臀部蒙皮组件和三传动机构;胸部蒙皮组件、上腰部蒙皮组件和臀部蒙皮组件分别与一传动机构传动连接;颈部蒙皮1连接于胸部蒙皮组件对应的传动机构上;上腰部蒙皮组件对应的传动机构连接于胸部蒙皮组件对应的传动机构下;下腰部蒙皮6连接于上腰部蒙皮组件对应的传动机构下;臀部蒙皮组件对应的传动机构连接于上腰部蒙皮组件对应的传动组件下并位于下腰部蒙皮6下方。
35.传动机构包括若干蒙皮铰链18、若干杆件铰链12、若干杆件25、一电机支座13、一空轴伺服电机14、一支撑主杆15、一锁紧轴承16、一转盘17、一底座19、一轴套20、一从动齿轮21、一角接触轴承22和一主动齿轮23;胸部蒙皮组件、上腰部蒙皮组件和臀部蒙皮组件分别连接对应的蒙皮铰链18;蒙皮铰链18与杆件铰链12的第一端枢接;杆件铰链12的第二端上部连接杆件25;转盘17沿中心形成多个弧形槽,杆件25插设于对应的弧形槽内;底座19、轴套20、转盘17、从动齿轮21和电机支座13依次自下而上套设于支撑主杆15外;主杆通过锁紧轴承16连接于底座19的中心部;转盘17通过螺栓连接从动齿轮21;空轴伺服电机14固定于电机支座13上并与主动齿轮23的一传动杆传动连接;传动杆通过角接触轴承22连接电机支座13;主动齿轮23与从动齿轮21啮合;底座19开设有限位槽,限位槽对杆件铰链12在竖直方向限位。
36.轴套20用于调整转盘17与底座19的高度,防止转盘17和底座19之间生产摩擦。底座19用于主要支撑的作用,其上的t型限位槽用于约束杆件铰链12的z方向移动。
37.空轴伺服电机14和主动齿轮23经过空轴伺服电机14内部结构锁紧连接,角接触轴承22确保主动齿轮23的正常工作。
38.胸部蒙皮组件、上腰部蒙皮组件和臀部蒙皮组件分别对应的支撑主杆15通过m5的螺纹孔依次连接。
39.胸部蒙皮组件包括两后背部蒙皮2、两胸部蒙皮3和两肩部蒙皮9;后背部蒙皮2、胸部蒙皮3和肩部蒙皮9分别连接对应的蒙皮铰链18。
40.上腰部蒙皮组件包括两上腰后部蒙皮4、两上腰前部蒙皮5和两上腰侧部蒙皮10,上腰后部蒙皮4、上腰前部蒙皮5和上腰侧部蒙皮10分别连接对应的蒙皮铰链18。
41.臀部蒙皮组件包括两臀部蒙皮8、两前腹部蒙皮7和两臀侧部蒙皮11;臀部蒙皮8、前腹部蒙皮7和臀侧部蒙皮11分别连接对应的蒙皮铰链18。
42.本实施例中,蒙皮结构主要使用的加工材料为尼龙材料,该材料便于加工,加工精度高,且造价便宜。加工精度在0.01-0.05mm,表面均要做抛光处理,降低表面的粗糙度。
43.本发明中的蒙皮结构:可直接取自于模特模型,通过切片工具在特定的区域进行分割以及边缘的处理后,在蒙皮表面涂刷一层软硅橡胶层材料,美观的同时,防止蒙皮对衣服表面造成不必要的损伤。
44.以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1