一种汽车试验用仿人机器人的腰部组件的制作方法
1.本发明涉及汽车试验装置技术领域,尤其涉及一种汽车试验用仿人机器人的腰部组件。
背景技术:
2.安全性能是消费者选购汽车的重要标准之一,在各种车型流入市场前,需要对车辆进行各类安全性能测试。尤其随着汽车自动驾驶的普及,在汽车出厂前,需要进行更多的安全性能测试试验,来确保汽车的安全性能,通常可通过机器人模仿驾驶员对汽车进行操作。
3.很多汽车试验需要用到仿人机器人,仿人机器人具有人类的外形,且可通过程序控制,使其模仿人类的动作。为了保证试验的准确性,要求仿人机器人制造的尽量与人更加贴切,并可以完成人的各种动作。
4.仿人机器人的腰部组件,是用于模拟人腰部的结构。现有仿人机器人的腰部组件大多都是固定式的,即不能像人的腰部一样,进行各个角度转动以及摆动;而且在试验过程中,汽车行驶在各种不同的路况下,难免会出现故障的情况,现有仿人机器人的腰部组件当出现突发故障时,没有及时的应急措施,经常会导致试验被迫中止,而一些试验被迫中止后,又需从头开始,导致试验耗时和试验成本都高。
技术实现要素:
5.针对现有技术存在的上述不足,本发明所要解决的技术问题在于:提出一种模拟效果好、自由度高,且可保证试验进展顺利的汽车试验用仿人机器人的腰部组件。
6.本发明解决其技术问题采用的技术方案是,提出一种汽车试验用仿人机器人的腰部组件,包括:安装座;从下至上依次设置在所述安装座中的第一传动齿轮、第二传动齿轮和第三传动齿轮;所述第一传动齿轮、第二传动齿轮和第三传动齿轮分别向上伸出第一转筒、第二转筒和第三转筒,且所述第一转筒穿设在所述第二转筒中,所述第二转筒穿设在所述第三转筒中;从上至下依次设置的第一转盘、第二转盘和第三转盘;所述第一转盘、第二转盘和第三转盘分别套设在所述第一转筒、第二转筒和第三转筒上;骨架、第一转动臂、第二转动臂和第三转动臂,所述第一转动臂、第二转动臂和第三转动臂三者的一端分别与所述第一转盘、第二转盘和第三转盘铰接,所述第一转动臂、第二转动臂和第三转动臂三者的另一端分别与所述骨架铰接;驱动机构,设置在所述安装座中,包括第一电机、第二电机、第三电机、第四电机和抵推件;所述第一电机、第二电机、第三电机和第四电机四者的输出轴上分别设有第一主动齿轮、第二主动齿轮、第三主动齿轮和第四主动齿轮,所述第一主动齿轮与所述第一传动齿轮啮合,所述第二主动齿轮与所述第二传动齿轮啮合,所述第三主动齿轮与所述第三传动
齿轮啮合;所述抵推件可驱使所述第四电机升降运动,以使所述第四主动齿轮与所述第一传动齿轮或第二传动齿轮或第三传动齿轮啮合。
7.进一步地,所述抵推件活动地设置在所述安装座中,所述抵推件从上至下依次设有第一抵推部、第二抵推部和第三抵推部;当所述第一抵推部抵于所述第四电机上时,所述第四主动齿轮与所述第三传动齿轮啮合;当所述第二抵推部抵于所述第四电机上时,所述第四主动齿轮与所述第二传动齿轮啮合;当所述第三抵推部抵于所述第四电机上时,所述第四主动齿轮与所述第一传动齿轮啮合。
8.进一步地,所述第一抵推部和所述第二抵推部之间通过第一斜面连接,所述第二抵推部和所述第三抵推部之间通过第二斜面连接。
9.进一步地,所述第三抵推部与所述抵推件的底面通过第三斜面连接。
10.进一步地,所述抵推件的两侧分别凸出一滑块,所述安装座上设有与所述滑块一一对应的滑槽,所述滑块可滑动地设置在所述滑槽中。
11.进一步地,所述驱动机构还包括第五电机和与所述第五电机连接的丝杠,所述第五电机设置在所述安装座上,所述丝杠与所述抵推件连接;所述第五电机可通过所述丝杠驱使所述抵推件沿着所述滑槽滑动。
12.进一步地,所述安装座包括依次可拆卸连接的上座体、下座体和底板;所述骨架、第一转动臂、第二转动臂、第三转动臂、第一转盘、第二转盘和第三转盘均处于所述上座体的上方;所述第一传动齿轮、第二传动齿轮、第三传动齿轮、第一主动齿轮、第二主动齿轮、第三主动齿轮和第四主动齿轮均处于所述上座体和下座体之间;所述第一电机、第二电机、第三电机和第四电机均安装在所述下座体上;所述抵推件被支撑于所述底板上。
13.进一步地,所述第一电机、第二电机、第三电机和第四电机分别沿所述下座体的周向设置。
14.进一步地,所述第一转盘和所述第二转盘之间,所述第二转盘和所述第三转盘之间,所述第三转盘和所述上座体之间,所述上座体与所述第三传动齿轮之间,所述第三传动齿轮与所述第二传动齿轮之间,所述第二传动齿轮与所述第一传动齿轮之间,以及所述第一传动齿轮与所述下座体之间均设有挡圈。
15.进一步地,所述第一转盘上具有第一连接臂,所述第二转盘上具有第二连接臂,所述第三转盘上具有第三连接臂;所述骨架沿其周向均布有第一铰接部、第二铰接部和第三铰接部,所述第一转动臂的两端分别与所述第一铰接部和所述第一连接臂铰接;所述第二转动臂的两端分别与所述第二铰接部和所述第二连接臂铰接;所述第三转动臂的两端分别与所述第三铰接部和所述第三连接臂铰接;所述第一转动臂、第二转动臂和第三转动臂均呈弧形设置。
16.与现有技术相比,本发明至少具有以下有益效果:
本发明中,第一电机上的第一主动齿轮与第一传动齿轮啮合,第二电机上的第二主动齿轮与第二传动齿轮啮合,第三电机上的第三主动齿轮与第三传动齿轮啮合。在工作过程中,无论该三个电机中的哪个电机出现故障或者该三个主动齿轮中的哪个主动齿轮出现故障,抵推件均可驱使第四电机升降运动,以使第四电机上的第四主动齿轮与第一传动齿轮或第二传动齿轮或第三传动齿轮啮合,以免出现因为各电机或主动齿轮临时故障,而导致试验中途停止,试验无法正常进行的情况发生。其中,在抵推件上分别设置了第一抵推部、第二抵推部和第三抵推部,当第四电机抵在第一抵推部或第二抵推部或第三抵推部上时,第四主动齿轮与第三传动齿轮或第二传动齿轮或第一传动齿轮啮合,保证第四电机不会后退,防止第四主动齿轮脱离啮合,进而保证第四主动齿轮与传动齿轮的啮合稳定性。
17.本发明中,第一电机通过第一主动齿轮、第一传动齿轮、第一转盘和第一转动臂驱使骨架运动;第二电机通过第二主动齿轮、第二传动齿轮、第二转盘和第二转动臂驱使骨架运动;第三电机通过第三主动齿轮、第三传动齿轮、第三转盘和第三转动臂驱使骨架运动,三个运动合成为骨架的运动,使得骨架可以自由转动和自由摆动,达到与人类腰部一样的运动效果,保证试验结果的准确性。
附图说明
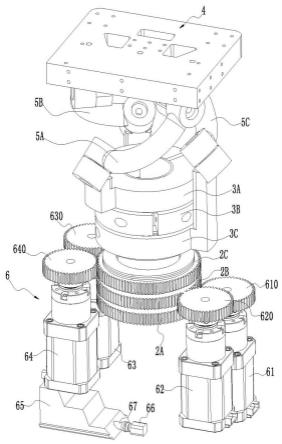
18.图1为本发明腰部组件的结构示意图;图2为图1去除安装座后的结构示意图;图3为腰部组件的分解示意图;图4为第四电机、抵推件、丝杠和第五电机的结构示意图;图5为腰部组件去除安装座和驱动机构后的结构示意图;图6为图5去除骨架和三个转动臂后的半剖示意图;图7为骨架和三个转动臂的装配示意图。
19.图中:1、安装座;11、上座体;12、下座体;13、底板;120、滑槽;2a、第一传动齿轮 ;2b、第二传动齿轮;2c、第三传动齿轮;20、挡圈;21、第一转筒;22、第二转筒;23、第三转筒;3a、第一转盘;3b、第二转盘;3c、第三转盘;31、第一连接臂;32、第二连接臂;33、第三连接臂;4、骨架;41、第一铰接部;42、第二铰接部;43、第三铰接部;5a、第一转动臂;5b、第二转动臂;5c、第三转动臂;6、驱动机构;61、第一电机;62、第二电机;63、第三电机;64、第四电机;65、抵推件;66、第五电机;67、丝杠;610、第一主动齿轮;620、第二主动齿轮;630、第三主动齿轮;640、第四主动齿轮;651、第一抵推部;652、第二抵推部;653、第三抵推部;654、第一斜面;655、第二斜面;656、第三斜面;657、滑块。
具体实施方式
20.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
21.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
22.另外,在本发明中如涉及“第一”、“第二”、“一”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
23.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
24.另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
25.如图1-图3所示,一种汽车试验用仿人机器人的腰部组件,主要包括:安装座1、第一传动齿轮2a、第二传动齿轮2b、第三传动齿轮2c、第一转盘3a、第二转盘3b、第三转盘3c、骨架4、第一转动臂5a、第二转动臂5b、第三转动臂5c和驱动机构6。其中,驱动机构6主要包括:第一电机61、第二电机62、第三电机63、第四电机64、第五电机66、抵推件65、丝杠67、第一主动齿轮610、第二主动齿轮620、第三主动齿轮630和第四主动齿轮640。
26.如图1-图3和图6所示,第一传动齿轮2a、第二传动齿轮2b和第三传动齿轮2c从下至上依次设置在所述安装座1中,叠层设置的第一传动齿轮2a、第二传动齿轮2b和第三传动齿轮2c充分利用安装座1的安装空间,且第一传动齿轮2a和第二传动齿轮2b之间,第二传动齿轮2b和第三传动齿轮2c之间均设有挡圈20,防止各个传动齿轮之间发生干涉。所述第一传动齿轮2a、第二传动齿轮2b和第三传动齿轮2c分别向上伸出第一转筒21、第二转筒22和第三转筒23,且所述第一转筒21穿设在所述第二转筒22中,所述第二转筒22穿设在所述第三转筒23中,即第一转筒21的高度最高,第二转筒22的高度次之,第三转筒23的高度最矮,以方便将第一转盘3a、第二转盘3b和第三转盘3c叠层设置在该三个转筒上。
27.第一转盘3a、第二转盘3b和第三转盘3c从上至下依次设置,所述第一转盘3a、第二转盘3b和第三转盘3c分别套设在所述第一转筒21、第二转筒22和第三转筒23上,即第一转盘3a套设在第一转筒21上,与第一转筒21联动;第二转盘3b套设在第二转筒22上,与第二转筒22联动;第三转盘3c套设在第三转筒23上,与第三转筒23联动。三个传动齿轮和三个转盘整体呈叠层设置,结构紧凑。
28.如图5-图7所示,第一转动臂5a、第二转动臂5b和第三转动臂5c三者的一端分别与所述第一转盘3a、第二转盘3b和第三转盘3c铰接,所述第一转动臂5a、第二转动臂5b和第三转动臂5c三者的另一端分别与所述骨架4铰接。
29.具体地,所述第一转盘3a上具有第一连接臂31,所述第二转盘3b上具有第二连接臂32,所述第三转盘3c上具有第三连接臂33。所述骨架4沿其周向均布有第一铰接部41、第二铰接部42和第三铰接部43,所述第一转动臂5a的两端分别与所述第一铰接部41和所述第
一连接臂31铰接;所述第二转动臂5b的两端分别与所述第二铰接部42和所述第二连接臂32铰接;所述第三转动臂5c的两端分别与所述第三铰接部43和所述第三连接臂33铰接。所述第一转动臂5a、第二转动臂5b和第三转动臂5c均呈弧形设置,三个弧形转动臂分布于骨架4的周向,且三个弧形转动臂的运动,合成骨架4的运动。
30.在实际使用过程中,本实施例的第一电机61通过第一主动齿轮610、第一传动齿轮2a、第一转盘3a和第一转动臂5a驱使骨架4运动;第二电机62通过第二主动齿轮620、第二传动齿轮2b、第二转盘3b和第二转动臂5b驱使骨架4运动;第三电机63通过第三主动齿轮630、第三传动齿轮2c、第三转盘3c和第三转动臂5c驱使骨架4运动,三个运动合成为骨架4的运动,使得骨架4可以自由转动和自由摆动,达到与人类腰部一样的运动效果,保证试验结果的准确性。
31.如图2-图3所示,驱动机构6设置在所述安装座1中,包括有第一电机61、第二电机62、第三电机63、第四电机64和抵推件65;所述第一电机61、第二电机62、第三电机63和第四电机64四者的输出轴上分别设有第一主动齿轮610、第二主动齿轮620、第三主动齿轮630和第四主动齿轮640,所述第一主动齿轮610与所述第一传动齿轮2a啮合,所述第二主动齿轮620与所述第二传动齿轮2b啮合,所述第三主动齿轮630与所述第三传动齿轮2c啮合;所述抵推件65可驱使所述第四电机64升降运动,以使所述第四主动齿轮640与所述第一传动齿轮2a或第二传动齿轮2b或第三传动齿轮2c啮合。在正常的工作状态下,第一电机61、第二电机62、第三电机63、第一主动齿轮610、第二主动齿轮620和第三主动齿轮630均正常工作,第四主动齿轮640可与任意一个传动齿轮啮合,但第四电机64不工作,第四主动齿轮640进行空转;第四主动齿轮640也可以不与任何一个传动齿轮啮合。第一电机61、第二电机62、第三电机63和第四电机64分别沿安装座1中下座体12的周向设置,保证整体占用的空间小,使得整个腰部组件的结构紧凑度高。
32.在实际的工作过程中,第一电机61上的第一主动齿轮610与第一传动齿轮2a啮合,第二电机62上的第二主动齿轮620与第二传动齿轮2b啮合,第三电机63上的第三主动齿轮630与第三传动齿轮2c啮合。无论该三个电机中的哪个电机出现故障(比如烧坏)或者该三个主动齿轮中的哪个主动齿轮出现故障(比如崩齿),抵推件65均可驱使第四电机64升降运动,以使第四电机64上的第四主动齿轮640与第一传动齿轮2a或第二传动齿轮2b或第三传动齿轮2c啮合,以免出现因为各个电机或者主动齿轮临时故障,而导致试验中途停止,试验无法正常进行的情况发生。
33.优选地,如图2和图4所示,抵推件65活动地设置在所述安装座1中,所述抵推件65从上至下依次设有第一抵推部651、第二抵推部652和第三抵推部653。当所述第一抵推部651抵于所述第四电机64上时,所述第四主动齿轮640与所述第三传动齿轮2c啮合,第四电机64处于最高位置。当所述第二抵推部652抵于所述第四电机64上时,所述第四主动齿轮640与所述第二传动齿轮2b啮合。当所述第三抵推部653抵于所述第四电机64上时,所述第四主动齿轮640与所述第一传动齿轮2a啮合,第四电机64处于最矮位置。
34.需要说明的是,该抵推件65还可为其他结构,比如直接通过丝杠作用在第四电机64上,驱使第四电机64升降运动。但是,相比于其他的结构,本实施例中的抵推件65更能有效保证第四电机64的稳定性。
35.其中,所述第一抵推部651和所述第二抵推部652之间通过第一斜面654连接,所述
第二抵推部652和所述第三抵推部653之间通过第二斜面655连接,所述第三抵推部653与所述抵推件65的底面通过第三斜面656连接。第四电机64在第一抵推部651、第二抵推部652和第三抵推部653之间切换时,可以沿着第一斜面654和第二斜面655滑动,第四电机64的位置切换平顺。
36.在使用过程中,本实施例在抵推件65上分别设置了第一抵推部651、第二抵推部652和第三抵推部653,当第四电机64抵在第一抵推部651或第二抵推部652或第三抵推部653上时,第四主动齿轮640与第三传动齿轮2c或第二传动齿轮2b或第一传动齿轮2a啮合,保证第四电机64不会后退,防止第四主动齿轮640脱离啮合,进而保证第四主动齿轮640与传动齿轮的啮合稳定性。
37.在抵推件65的两侧分别凸出一滑块657,所述安装座1上设有与所述滑块657一一对应的滑槽120,即滑块657和滑槽120的数量均为两个,所述滑块657可滑动地设置在所述滑槽120中,所述滑块657沿着所述滑槽120滑动,对抵推件65的运动进行导向,且可防止抵推件65从安装座1上脱离。其中,为了能实现抵推件65的自动滑动调节,即实现第四电机64和第四主动齿轮640所处高度的自动调节,本实施例的驱动机构6还包括第五电机66和与所述第五电机66连接的丝杠67,所述第五电机66设置在所述安装座1上,所述丝杠67与所述抵推件65连接,即相当于将丝杠67螺母中的螺母集成于抵推件65上了,所述第五电机66可通过所述丝杠67驱使所述抵推件65沿着所述滑槽120滑动。
38.如图1和图3所示,安装座1包括依次可拆卸连接的上座体11、下座体12和底板13。所述骨架4、第一转动臂5a、第二转动臂5b、第三转动臂5c、第一转盘3a、第二转盘3b和第三转盘3c均处于所述上座体11的上方。所述第一传动齿轮2a、第二传动齿轮2b、第三传动齿轮2c、第一主动齿轮610、第二主动齿轮620、第三主动齿轮630和第四主动齿轮640均处于所述上座体11和下座体12之间。所述第一电机61、第二电机62、第三电机63和第四电机64均安装在所述下座体12上。所述抵推件65被支撑于所述底板13上。腰部组件的此种整体布置形式,使得腰部组件的整体结构紧凑。且在所述上座体11与所述第三传动齿轮2c之间,所述第三传动齿轮2c与所述第二传动齿轮2b之间,所述第二传动齿轮2b与所述第一传动齿轮2a之间,以及所述第一传动齿轮2a与所述下座体12之间也均设有挡圈20,该挡圈20优选为橡胶挡圈20,防止相邻两部件进行刚性摩擦。
39.本实施例腰部组件的工作原理为:第一电机61转动,使得第一主动齿轮610转动,第一主动齿轮610啮合传动第一传动齿轮2a,第一传动齿轮2a通过第一转筒21驱使第一转盘3a转动,第一转盘3a通过第一转动臂5a带动骨架4运动。第二电机62转动,使得第二主动齿轮620转动,第二主动齿轮620啮合传动第二传动齿轮2b,第二传动齿轮2b通过第二转筒22驱使第二转盘3b转动,第二转盘3b通过第二转动臂5b带动骨架4运动。第三电机63转动,使得第三主动齿轮630转动,第三主动齿轮630啮合传动第三传动齿轮2c,第三传动齿轮2c通过第三转筒23驱使第三转盘3c转动,第三转盘3c通过第三转动臂5c带动骨架4运动。即第一电机61、第二电机62和第三电机63协同驱动骨架4,使得骨架4可以像人的腰部一样,进行自由转动和自由摆动。当第一电机61或者第一主动齿轮610故障时,第五电机66驱使丝杠67转动,使得抵推件65滑动,抵推件65上的第三抵推部653抵在第四电机64上,使得第四主动齿轮640与第一传动齿轮2a啮合,第四电机64和第四主动齿轮640替代第一电机61和第一主动齿轮610的工作。当第二电机62或者第二主动齿轮620故障时,第五电机66驱使丝杠67转
动,使得抵推件65滑动,抵推件65上的第二抵推部652抵在第四电机64上,使得第四主动齿轮640与第二传动齿轮2b啮合,第四电机64和第四主动齿轮640替代第二电机62和第二主动齿轮620的工作。当第三电机63或第三主动齿轮630故障时,第五电机66驱使丝杠67转动,使得抵推件65滑动,抵推件65上的第一抵推部651抵在第四电机64上,使得第四主动齿轮640与第三传动齿轮2c啮合,第四电机64和第四主动齿轮640替代第三电机63和第三主动齿轮630的工作。
40.本方案中,本腰部组件的模拟效果好、自由度高,且可保证试验的进展顺利。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1