用于药物溶出仪的机械抓手的制作方法
1.本实用新型涉及药物溶出仪领域,尤其涉及一种用于药物溶出仪的机械抓手。
背景技术:
2.测量药品在溶解程度的仪器。药物溶出仪是在体外对体内药物生物利用度进行研究和评价的有效的替代方法,也是保证和衡量固体口服制剂生产工艺及质量是否合理和稳定的一项重要手段。它以科学先进的测定手段替代了过去的崩解时限检查,从而提高了药品质量控制方法的科学性,保证了药品的临床疗效。
3.药物溶出仪中设有取样仪,药物进入取样仪进行分析之前需要经过滤嘴过滤处理。药液经过滤嘴后不可避免部分沉淀在滤嘴上,当新一批次的药液被注入取样仪后,取样仪获得的样品将是含有上一批次和这一批次的药液混合物。这显然地会导致取样仪的分析结果。为此,一般地,取样仪经过一批次的取样后,需要更换滤嘴。然而,现有技术中,滤嘴更换工作多需要试验人员拆卸滤嘴包装盒,再取出滤嘴进行更换,因此,药物溶出仪的相关试验需要在现场实时作业。
4.除此之外,部分药物溶出仪通过转篮使药物溶解。针对不同的工序,需要使用装有不同药物的转篮来作业,因此,相关试验会涉及转篮的更换工作,然而,现有的技术中,转篮的更换工作亦由人工来完成。
5.基于此,亟需对现有的药物溶出仪进行技术改造,以减少对工人的依赖。
技术实现要素:
6.针对根据现有技术的用于药物溶出仪的上述现状,本实用新型的目的之一在于提供一种可以用于药物溶出仪的机械抓手,滤嘴的更换工作能够由机械抓手来完成。
7.该目的通过实用新型以下形式的用于药物溶出仪的机械抓手来实现。该机械抓手包括:
8.第一机械臂;
9.第二机械臂,所述第二机械臂支撑于所述第一机械臂,二者同轴布置,并且第二机械臂能够绕其轴线转动;
10.第三机械臂,所述第三机械臂支撑于所述第二机械臂,第三机械臂与所述第一机械臂形成不大于150
°
的夹角,并且第三机械臂能够绕其轴线转动,其中,所述第三机械臂在背离第二机械臂的端面上包括布置在其不同周向位置的多个机械夹爪,所述机械夹爪具有在背离第三机械臂且呈圆柱状的抓持段,所述抓持段上形成有凹槽,各个所述机械夹爪能够在所述端面上移位以抓取物件。
11.根据本实用新型的一些优选实施方式,所述抓持段在其不同纵向位置上形成有宽度不同的至少两个所述凹槽,并且所述凹槽在所述抓持段的周向上至少延伸120
°
。
12.根据本实用新型的一些优选实施方式,所述凹槽上铺设有柔性薄膜层。
13.根据本实用新型的一些优选实施方式,至少两个所述凹槽中的至少一部分的深度
不同。
14.根据本实用新型的一些优选实施方式,所述机械夹爪还包括可移动地固定在所述第三机械臂的所述端面上的固定段,所述固定段和所述抓持段之间形成钝角形式的夹角。
15.根据本实用新型的一些优选实施方式,所述抓持段朝向所述固定段的一侧形成有沿纵向延伸的螺纹孔,所述固定段形成有与所述螺纹孔的形状匹配的通孔,固定件能够依次穿过所述通孔和所述螺纹孔而降所述抓持段和所述固定段彼此紧固。
16.根据本实用新型的一些优选实施方式,所述机械夹爪为伸缩杆,并且所述伸缩杆被配置成能够调节至少一个所述凹槽的宽度。
17.根据本实用新型的一些优选实施方式,所述机械抓手还包括旋转电机,所述旋转电机与多个所述机械夹爪动力连接,以使得多个所述机械夹爪能够同时第三机械臂的轴线转动。
18.根据本实用新型的一些优选实施方式,所述机械抓手的外壁面上固定有用于检测物件的位置和形状的视觉传感器,所述机械抓手基于所述视觉传感器的感测数据执行动作。
19.根据本实用新型的一些优选实施方式,多个所述凹槽的宽度和所述药物溶出仪的滤嘴、转篮中的至少一个的尺寸相同。
20.在符合本领域常识的基础上,上述各优选实施方式,可任意组合,即得本实用新型各较佳实例。
21.在本实用新型设计的药物溶出仪的机械抓手中的机械夹爪设有呈圆柱状的抓持段,并且抓持段的表面形成有凹槽。这种该凹槽特别适于机械抓手抓取滤嘴、转篮等药物溶出仪中需要更换的设备。利用该机械转手可以保证药物溶出仪实现自动化生产的目的。
附图说明
22.为了更好地理解本实用新型的上述及其他目的、特征、优点和功能,可以参考附图中所示的优选实施方式。附图中相同的附图标记指代相同的部件。本领域技术人员应该理解,附图旨在示意性地阐明本实用新型的优选实施方式,对本实用新型的范围没有任何限制作用,图中各个部件并非按比例绘制。
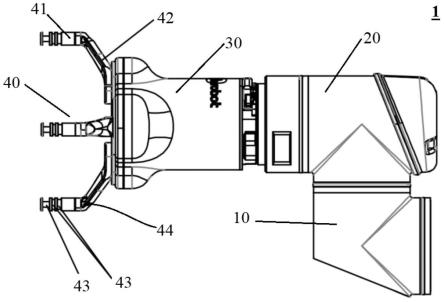
23.图1是根据本实用新型的优选实施方式的用于药物溶出仪的机械抓手的侧视图。
24.图2是图1的左侧视图。
具体实施方式
25.接下来将参照附图详细描述本实用新型的实用新型构思。这里所描述的仅仅是根据本实用新型的优选实施方式,本领域技术人员可以在所述优选实施方式的基础上想到能够实现本实用新型的其他方式,所述其他方式同样落入本实用新型的范围。在以下的具体描述中,例如“上”、“下”、“内”、“外”、“纵”、“横”等方向性的术语,参考附图中描述的方向使用。本实用新型的实施例的部件可被置于多种不同的方向,方向性的术语是用于示例的目的而非限制性的。
26.图1、2示出了根据本实用新型的用于药物溶出仪的机械抓手1的侧视图和正视图。该机械抓手1用于药物溶出仪的滤嘴、转篮等试验过程中需要更换、转移等的小件物件。如
图所示,该机械抓手1包括第一机械臂10、第二机械臂20和第三机械臂30等。第一机械臂10 作为机械抓手1的支撑柱,其内部可布置用于控制机械抓手1的控制器等。可选地,将第一机械臂10设定为固定件,其不做任何转动或摆动动作。
27.第二机械臂20支撑于第一机械臂10,二者同轴布置,并且第二机械臂20能够绕第一机械臂10的轴线转动。第二机械臂20呈l型,其两个端口分别转动地与第一机械臂10和第三机械臂30连接。
28.第三机械臂30支撑于第二机械臂20,第三机械臂30能够绕自身的轴线转动。第三机械臂30与第一机械臂10形成不大于150
°
的夹角。在图1的示例中,第三机械臂30和第一机械臂10形成90
°
的夹角。当第二机械臂20绕第一机械臂10转动时,第三机械臂30因此能够以第一机械臂10为中心形成最大的覆盖区域,使得机械抓手1具有最大的移动范围。可替换地,第三机械臂30和第一机械臂10之间的夹角可以为120
°
、135
°
等等,这可以根据药物溶出仪中机械抓手1 的布置位置,以及所需更换的物件位置和物件备料存放位置来确定。
29.第三机械臂30在背离第二机械臂20的端面上布置在其不同周向位置的三个机械夹爪40,机械夹爪40具有在背离第三机械臂30且呈圆柱状的抓持段41,抓持段41上形成有凹槽43,各个机械夹爪40能够在端面上移位以抓取物件。机械夹爪40的数量可替换地进行设置,例如将机械夹爪40的数量设定为4、5等等,这可以根据所需抓取的目前的具体形状等来确定。
30.圆柱状的抓持段41特别适用于抓取诸如转篮、滤嘴等药物溶出仪中需要进行更换、移动的物件。特别的,抓持段41上的凹槽43特别利于抓持具有薄壁外缘的物件,例如转篮等。具体而言,转篮的周向薄壁外缘可以被卡在凹槽43内,从而提高机械抓手1抓持转篮等物件的稳定性。
31.抓持段41在其不同纵向位置上形成有宽度不同的至少两个凹槽 43,并且凹槽43在抓持段41的周向上至少延伸120
°
。对于不同的凹槽43,其可以卡接在不同壁厚的外缘上。凹槽43的宽度和药物溶出仪的滤嘴、转篮中的至少一个的尺寸相同。因此,该形式的抓持段 41使得机械转手具有更广泛的使用范围。
32.可选地,凹槽43上铺设有柔性薄膜层(未示出)。机械抓手1抓持目标物件后,凹槽43上的柔性薄膜层可减少机械抓手1和目标物件之间的硬摩擦和碰撞,从而避免目标物件被机械抓手1压迫变形。
33.根据本实用新型的一些优选实施方式,至少两个凹槽43中的至少一部分的深度不同。例如,在图1所示的设有3个凹槽43的机械抓手 1中,抓持段41在远离第三机械臂30的凹槽43具有最大的深度,而将其余两个凹槽43的深度设置成相同。在其他未示出的示例中,不同深度的凹槽43可根据所要夹持的物件的具体构造来决定。具体而言,可设置相应凹槽43的深度,使得不同位置的凹槽43能够同时抵靠位于目标物件的不同位置的薄壁外缘。
34.机械抓手1的机械夹爪40具有上文所述的抓持段41以外,还设有可移动地固定在第三机械臂30的端面上的固定段42。固定段42和抓持段41之间形成钝角形式的夹角。在图1的示例中,固定段42和抓持段41之间大致形成120
°
的夹角,这种设置可使得第三机械臂30 上用于承载机械夹爪40的端面适当缩小,从而有利于小型化设计第三机械臂30以及其他机械臂,从而提高机械抓手1的灵活度。
35.根据本实用新型,机械夹爪40可以是一种简易可拆的结构。具体而言,在抓持段41
朝向固定段42的一侧设有沿纵向延伸的螺纹孔。相对应地,固定段42形成有与螺纹孔的形状匹配的通孔。固定件(螺栓或螺钉)能够依次穿过通孔和螺纹孔而降抓持段41和固定段42彼此紧固。参见图1,抓持段41与固定段42彼此连接的位置恰好为二者形成夹角的拐角处。
36.优选地,机械夹爪40被设定为伸缩杆,并且伸缩杆被配置成能够调节至少一个凹槽43的宽度。更优选地,将机械夹爪40中距离第三机械臂30最近的凹槽43部分设置成可调宽度。显然地,可调凹槽43 宽度的伸缩杆式机械夹爪40可使得机械夹爪40适用于抓取各种形式的目标物件。而伸缩杆式机械夹爪40的伸缩段设置在紧邻其主体结构的部分可利于将凹槽43宽度设置至最大后,机械夹爪40仍有最高强度的刚度,避免抓持段41弯折。
37.尽管当机械夹爪40抓取物件后可通过转动第三机械臂30的方式来转动物件,然而在部分场景下并不期望第三机械臂30此时进行转动,为此,机械抓手1可设置与多个机械夹爪40动力连接的旋转电机,以使得多个机械夹爪40能够同时绕第三机械臂30的轴线转动。由此,在这些场景下,机械夹爪40依然可实现转动物件的目的(例如旋拧滤嘴以实现更换目的)。
38.机械抓手40的外壁面上可选地固定用于检测物件的位置和形状的视觉传感器(未示出)。机械抓手40基于视觉传感器的感测数据执行动作。通过识别的方式,可进一步提高药物溶出仪的自动化程度。
39.本实用新型的保护范围仅由权利要求限定。得益于本实用新型的教导,本领域技术人员容易认识到可将本实用新型所实用新型结构的替代结构作为可行的替代实施方式,并且可将本实用新型所实用新型的实施方式进行组合以产生新的实施方式,它们同样落入所附权利要求书的范围内。
40.附图标记说明:
41.用于药物溶出仪的机械抓手:1。
42.第一机械臂:10。
43.第二机械臂:20。
44.第三机械臂:30。机械夹爪:40。抓持段:41。固定段:42。凹槽:43。
45.螺栓或螺钉:44。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1