一种高速公路隧道远程侦查灭火智能机器人的制作方法
本技术涉及特种机器人,尤其涉及一种高速公路隧道远程侦查灭火智能机器人。
背景技术:
1、近年来,全国交通运输系统致力加快交通基础设施建设,努力提升交通发展品质和交通服务水平,交通运输工作得到了快速发展,公路隧道总数和通车里程数都呈逐年上升趋势。已运营中的长隧道、特长隧道及隧道群数量越来越多,如甘肃省境内的连霍高速公路、青兰高速公路和武罐高速公路,隧道长度在整个线路长度中占很大比例,最高路段达到52%。我省目前高速公路总里程约5700余公里,共有750余座隧道,双向的隧道总长度约1000余公里。
2、由于高速公路隧道的规模、交通量、公路等级、地质情况、设备技术状况存在较大差异,加上隧道影响区域的行车环境与公路基本路段行车环境差异较大,隧道影响区域内驾车行驶时,会受隧道线形、路面特性、标志、标线、防护设施、照明、通风、监控、应急逃生、管理和运行速度等条件的约束,使隧道影响区域运行安全风险增大,一旦发生事故,救援处理难,容易引发二次事故,经济损失和社会影响巨大。
3、侦察灭火机器人应用于消防领域,一般由经过专业培训的人员操作或者使用,辅助消防员执行消防灭火任务的机器人,它具有感知、识别、判断及推理能力,并能够根据外界条件做出相应的调整,可以代替消防员进入高温、浓烟、易爆等极端环境,一定程度上保障消防员的人身安全,大幅度降低灭火过程中的危险性。
4、现有的灭火机器人大多应用在市区,街道等开阔场地,普遍体积较大,移动速度较慢,操控距离较短,在供水结构上一般采用手动对接水带的方式,但遇到隧道失火造成拥堵的特殊环境,大体积,底移速和短距离操控无法满足灭火需求。
5、另外,隧道属于相对密闭空间,在机器人操控和消防员辅助灭火方面会造成一定程度上的难度提升。
技术实现思路
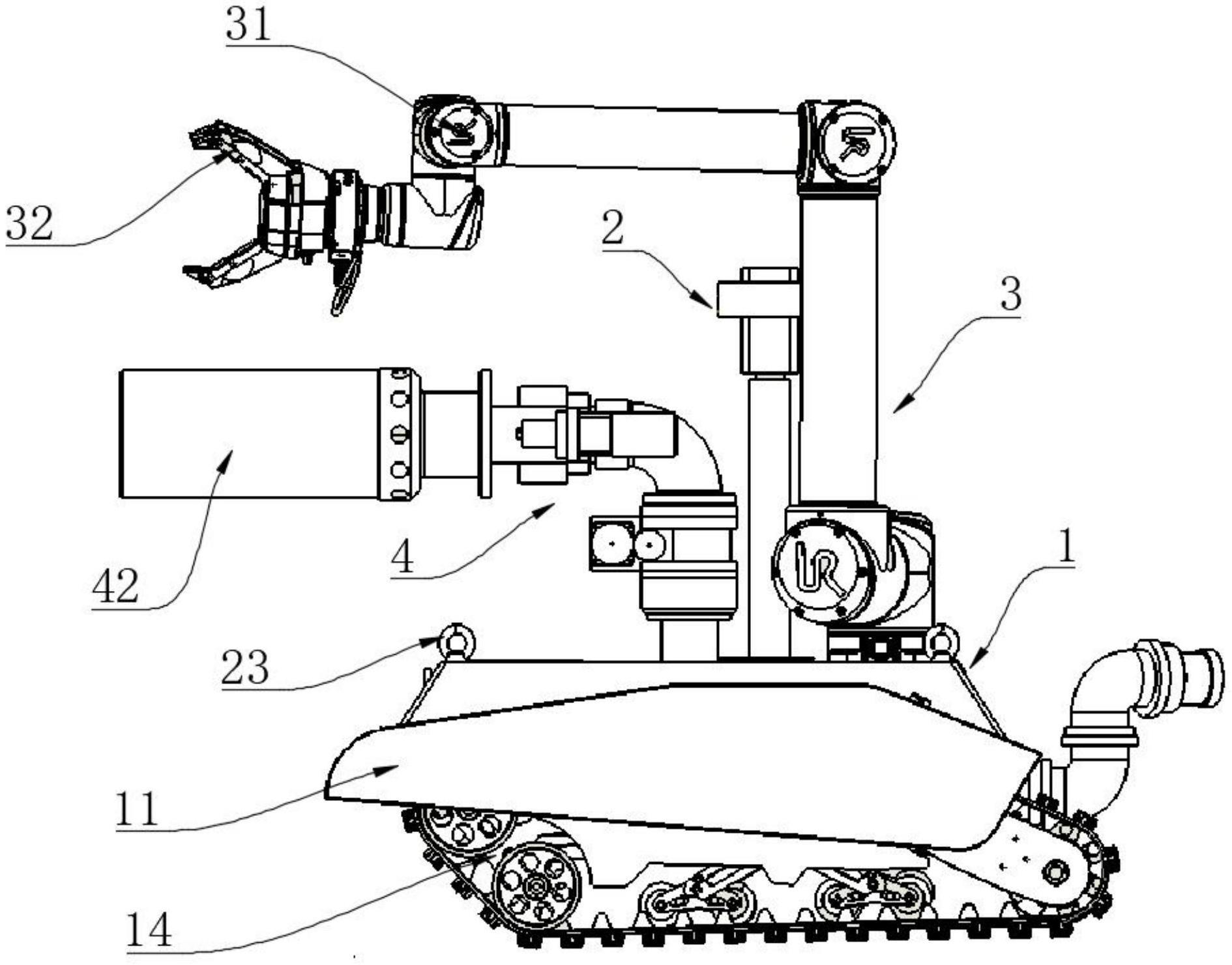
1、本实用新型的目的是为了解决现有技术中的问题,而提出的一种高速公路隧道远程侦查灭火智能机器人,包括agv移动平台、机器人手臂组件和灭火设备以及通讯网络设备,所述agv移动平台包括车身主体、全地形履带、控制模块与辅助驾驶模块,所述全地形履带通过电机驱动且全地形履带传动安装于车身主体底部,所述控制模块与辅助驾驶模块设置于agv移动平台内;
2、所述agv移动平台内设置有安全控制系统,所述安全控制系统包括辅助驾驶摄像头、火电探测报警的热成像摄像机、观察摄像头和安全行驶传感器,所述辅助驾驶摄像头、火电探测报警的热成像摄像机、观察摄像头和安全行驶传感器均与控制模块电性连接;
3、所述机器人手臂组件包括七轴机械手臂和设置于七轴机械手臂端的夹爪,所述夹爪和七轴机械手臂转动连接;
4、所述灭火设备包括灭火弹和灭火水炮,所述灭火水炮设置于车身主体上表面。
5、作为本申请优选的技术方案,所述辅助驾驶摄像头设置有四个,分别设置于车身主体顶部四角。
6、作为本申请优选的技术方案,所述电机的输出轴端设置有传动机构,所述传动机构和全地形履带传动连接。
7、作为本申请优选的技术方案,所述七轴机械手臂内部安装有感应定位装置,所述七轴机械手臂下方位于车身主体内设置有配套工具,所述配套工具包括消火栓开锁工具、消防水阀相应的开关工具和消防水带铺设工具。
8、作为本申请优选的技术方案,所述灭火弹选用超导热敏线式灭火弹,且灭火弹设置于车身主体内,所述智能灭火水炮选用tft消防水炮。
9、作为本申请优选的技术方案,所述通讯网络设备包括万兆企业路由器、万兆上联三层网管交换机、万兆单模双纤sfp+光模块、web网管工业以太网poe交换机、工业级千兆单模双纤sep光模块和工业级双频无线接入点,所述万兆企业路由器、万兆上联三层网管交换机、万兆单模双纤sfp+光模块、web网管工业以太网poe交换机、工业级千兆单模双纤sep光模块和工业级双频无线接入点均电性连接。
10、与现有技术相比,本实用新型提供了一种高速公路隧道远程侦查灭火智能机器人,具备以下有益效果:
11、1、远程操控移动平台搭配全地形车加装辅助驾驶摄像头、观察摄像头和安全行驶传感器,保证侦察灭火机器人在隧道这种特殊环境也拥有自动巡视,识别火源并向火源高速移动的功能;
12、2、搭载七轴机械手臂和夹爪,七轴机械手臂拥有七个自由度,可进行操作的空间更大,机械手臂的扭矩要求≥70牛米,可配合在消防栓水阀上加装感应定位装置或通过远程遥控,使机器人可以自主或人工辅助完成接近火灾现场进行消防栓水带的连接、消防栓水阀的开启和近火源布置灭火弹的任务,可代替消防人员优先靠近特殊火灾(易燃易爆品,有毒化工品等)现场进行初步灭火,降低消防人员生命威胁;
13、3、可以远程变换观测点及观测角度:可在七轴机械手臂机器人上加装摄像头,可以远程控制机械手臂的运动,调整位置及朝向,因此可以从不同的位置、角度进行观测。传统的观测车虽然也能够通过云台进行观测方向的调整,但是由于无法调整位置,因此,无法调整观测点,所以观测的灵活性受到限制;
14、4、可以实现超远程、复杂环境下高速的通讯:由于在整个隧道布置了网络设备,使整个隧道覆盖了无线信号,因此,只要在隧道范围内,就可以保证远程、高速的通讯,而不受距离和障碍物的影响。现有的设备均使用点对点的遥控设备,一方面会受到障碍物的阻挡,在复杂条件下,无法保证通讯通畅;另一方面,由于通讯遥控频率的限制,通讯带宽受到极大的限制,无法保证多路视频信号的传输,无法满足远程全方位观测及遥控的需求;
15、5、通讯架构具有高稳定性:由于整个通讯网络的设计采用了树形设计,当个别设备出现故障时,不会影响整个网络。而且,由于不是点对点的通讯,而是覆盖了整个区域,因此,当移动平台发生移动,无线通讯可以自动连接附近的热点基站,从而实现无缝漫游,通讯稳定性更强;
16、6、多路视频通讯保证远程遥控:远程操控移动平台的前后左右都设置了摄像头,实时回传各个方向的视频,以确保远程遥控远程操控移动平台。现有的其他遥控设备通常只能在可视的范围内工作,不提供视频。即使少数提供视频信息,也仅有一路视频,无法实时提供周围的全部信息,所以无法实现安全的远程驾驶;
17、7、具备主动安全措施:在极其特殊情况下,例如缺少无线网、突发障碍物等,远程操控移动平台都具备自动停车措施。因此,在极端条件下也不会出现失控的风险。
技术特征:
1.一种高速公路隧道远程侦查灭火智能机器人,其特征在于,包括agv移动平台(1)、机器人手臂组件(3)和灭火设备(4)以及通讯网络设备(5),所述agv移动平台包括车身主体(11)、全地形履带(14)、控制模块(15)与辅助驾驶模块(16),所述全地形履带(14)通过电机驱动且全地形履带(14)传动安装于车身主体(11)底部,所述控制模块(15)与辅助驾驶模块(16)设置于agv移动平台(1)内;
2.根据权利要求1所述的一种高速公路隧道远程侦查灭火智能机器人,其特征在于,所述辅助驾驶摄像头(21)设置有四个,分别设置于车身主体(11)顶部四角。
3.根据权利要求1所述的一种高速公路隧道远程侦查灭火智能机器人,其特征在于,所述电机的输出轴端设置有传动机构,所述传动机构和全地形履带(14)传动连接。
4.根据权利要求1所述的一种高速公路隧道远程侦查灭火智能机器人,其特征在于,所述七轴机械手臂(31)内部安装有感应定位装置(33),所述七轴机械手臂(31)下方位于车身主体(11)内设置有配套工具,所述配套工具包括消火栓开锁工具、消防水阀相应的开关工具和消防水带铺设工具。
5.根据权利要求1所述的一种高速公路隧道远程侦查灭火智能机器人,其特征在于,所述灭火弹选用超导热敏线式灭火弹,且灭火弹设置于车身主体(11)内,所述灭火水炮(42)选用tft消防水炮。
6.根据权利要求1所述的一种高速公路隧道远程侦查灭火智能机器人,其特征在于,所述通讯网络设备(5)包括万兆企业路由器(51)、万兆上联三层网管交换机(52)、万兆单模双纤sfp+光模块(53)、web网管工业以太网poe交换机(54)、工业级千兆单模双纤sep光模块(55)和工业级双频无线接入点(56),所述万兆企业路由器(51)、万兆上联三层网管交换机(52)、万兆单模双纤sfp+光模块(53)、web网管工业以太网poe交换机(54)、工业级千兆单模双纤sep光模块(55)和工业级双频无线接入点(56)均电性连接。
技术总结
本技术公开了一种高速公路隧道远程侦查灭火智能机器人,属于特种机器人技术领域;包括AGV移动平台、机器人手臂组件和灭火设备,所述AGV移动平台包括车身主体、全地形履带、控制模块,所述全地形履带通过电机驱动且全地形履带传动安装于车身主体底部,所述控制模块与辅助驾驶模块设置于AGV移动平台内;所述AGV移动平台内设置有安全控制系统,所述机器人手臂组件包括七轴机械手臂和设置于七轴机械手臂端的夹爪,所述灭火设备包括灭火弹和灭火水炮,所述灭火水炮设置于车身主体上表面,远程操控移动平台搭配全地形车加装辅助驾驶摄像头、观察摄像头和安全行驶传感器,保证侦察灭火机器人在隧道这种特殊环境也拥有自动巡视,识别火源并向火源高速移动的功能。
技术研发人员:陶健,王敬,李永胜,袁伟,梁斌,戎浩,刘艳强,张芳燕,梁超,李鑫,门昌灏,刘轲,徐乙文,刘佳,李晋山
受保护的技术使用者:山西省交通运输安全应急保障技术中心(有限公司)
技术研发日:20220816
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!