一种变配电消防灭火巡检机器人的制作方法
本技术涉及机器人,尤其涉及一种变配电消防灭火巡检机器人。
背景技术:
1、当前我国森林、家庭火灾频发,消防员在火场内救火完成后,后续还需要对火场中的情况进行监视,防止火苗滋生,导致火场内部出现复燃的情况,但是现在主要是通过消防员人工对火场内部进行观察检测,消防员在扑灭火场内的火源后,身心疲惫,对火场的监视无法达到高度集中,随着技术的不断发展,为了准确检测火场内的火源不会复燃,同时让消防员得到适当的休息时间,我们提出一种变配电消防灭火巡检机器人。
技术实现思路
1、本实用新型主要是解决上述现有技术所存在的技术问题,提供一种变配电消防灭火巡检机器人。
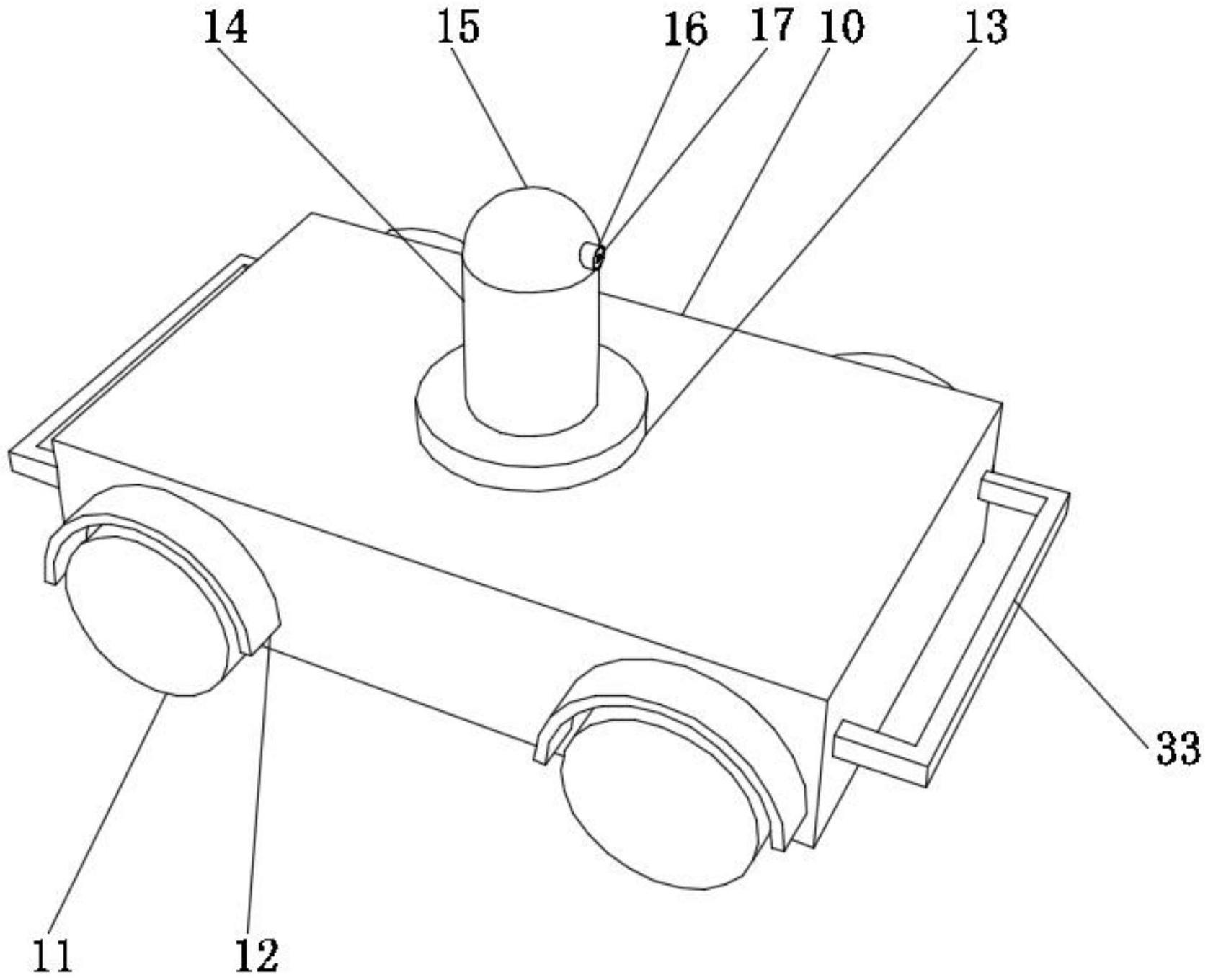
2、为了实现上述目的,本实用新型采用了如下技术方案,一种变配电消防灭火巡检机器人,包括主体,所述主体腔内呈镂空状态,主体腔内安装有转向装置,主体消防具有伸缩功能,主体的两端壁面上均固定安装防撞杆,两个防撞杆呈凹型,主体的顶部壁面上固定安装有第一旋转杆,第一旋转杆腔内呈镂空状态,第一旋转杆贯穿主体并伸入至主体腔内,第一旋转杆顶部固定安装有第二旋转杆,第二旋转杆腔内呈镂空状态,第二旋转杆顶部固定安装有第一保护罩,第一保护罩腔内呈镂空状态且第一保护罩腔内固定安装有第二保护罩,第二保护罩腔内固定安装有摄像头。
3、进一步,所述主体的外壁上活动安装有轮子,轮子共有四个,四个轮子呈矩形阵列分布在主体的外壁上。
4、进一步,四个所述轮子的上侧均安装有防护罩,四个防护罩均呈弧形,四个防护罩的一侧壁面均固定安装在主体的两侧壁面上,四个防护罩的位置与四个轮子的位置相对应。
5、进一步,所述转向装置包括连接杆,连接杆共有两个,两个连接杆分别安装在主体前端两个防护罩相互靠近的壁面上,两个连接杆均贯穿主体并伸入至主体腔内,两个连接杆相互靠近的一端固定安装有第一连接块,两个第一连接块的中间位置均固定安装有限位杆,两个限位杆的外侧安装有限位板,限位板两端均开设有限位槽,两个限位杆活动安装在对应限位槽腔内,两个限位杆的上侧外部上固定安装有联动板,两个联动板的另一端顶部中间位置均固定安装有凸块,两个凸块的外壁上固定安装有第二连接块。
6、进一步,两个所述第二连接块的另一端均固定安装有控制杆,两个控制杆的另一端均固定安装有第三连接块,两个第三连接块腔内均固定安装有螺钉,两个螺钉的上侧和下侧壁面上均固定安装有转向板,两个螺钉均贯穿两个转向板。
7、进一步,两个所述螺钉的另一端螺纹连接有螺母,螺母的一侧壁面活动连接在底部转向板的底部壁面上。
8、进一步,两个所述转向板其中底部的转向板的顶部壁面上固定安装有第三旋转杆,第三旋转杆贯穿两个转向板,第三旋转杆的另一端固定连接在伺服电机的输出端上,伺服电机的另一端固定安装在主体的顶部内壁上,第一旋转杆的底部固定连接在伺服电机的顶部输出端上。
9、有益效果
10、本实用新型提供了一种变配电消防灭火巡检机器人。具备以下有益效果:
11、(1)、该一种变配电消防灭火巡检机器人,通过设置第一旋转杆,第一旋转杆的底部通过伺服电机供电旋转,第一旋转杆旋转带动顶部的摄像头进行旋转,使得摄像头可以观察火灾现场的情况,防止主体在行驶过程中出现视野盲区,无法有效火场中的情况进行检测,可能出现火源复燃消防员无法及时发现的情况,提高机器人的火场检测能力和工作效率。
12、(2)、该一种变配电消防灭火巡检机器人,通过设置螺钉和螺母,螺钉贯穿两个转向板并且螺钉的另一端通过与螺母进行螺纹连接而固定在下侧转向板的底部壁面上,使得控制杆可以根据转向板的转动而转动,从而带动整个转向装置进行工作,增加动能的使用率,减少对电能的损耗,提高机器人的使用效率。
技术特征:
1.一种变配电消防灭火巡检机器人,包括主体(10),其特征在于:所述主体(10)腔内呈镂空状态,主体(10)腔内安装有转向装置,主体(10)的两端壁面上均固定安装防撞杆(33),两个防撞杆(33)呈凹型,主体(10)的顶部壁面上固定安装有第一旋转杆(13),第一旋转杆(13)腔内呈镂空状态,第一旋转杆(13)贯穿主体(10)并伸入至主体(10)腔内,第一旋转杆(13)顶部固定安装有第二旋转杆(14),第二旋转杆(14)腔内呈镂空状态,第二旋转杆(14)顶部固定安装有第一保护罩(15),第一保护罩(15)腔内呈镂空状态且第一保护罩(15)腔内固定安装有第二保护罩(16),第二保护罩(16)腔内固定安装有摄像头(17)。
2.根据权利要求1所述的一种变配电消防灭火巡检机器人,其特征在于:所述主体(10)的外壁上活动安装有轮子(11),轮子(11)共有四个,四个轮子(11)呈矩形阵列分布在主体(10)的外壁上。
3.根据权利要求2所述的一种变配电消防灭火巡检机器人,其特征在于:四个所述轮子(11)的上侧均安装有防护罩(12),四个防护罩(12)均呈弧形,四个防护罩(12)的一侧壁面均固定安装在主体(10)的两侧壁面上,四个防护罩(12)的位置与四个轮子(11)的位置相对应。
4.根据权利要求1所述的一种变配电消防灭火巡检机器人,其特征在于:所述转向装置包括连接杆(18),连接杆(18)共有两个,两个连接杆(18)分别安装在主体(10)前端两个防护罩(12)相互靠近的壁面上,两个连接杆(18)均贯穿主体(10)并伸入至主体(10)腔内,两个连接杆(18)相互靠近的一端固定安装有第一连接块(19),两个第一连接块(19)的中间位置均固定安装有限位杆(20),两个限位杆(20)的外侧安装有限位板(22),限位板(22)两端均开设有限位槽(21),两个限位杆(20)活动安装在对应限位槽(21)腔内,两个限位杆(20)的上侧外部上固定安装有联动板(23),两个联动板(23)的另一端顶部中间位置均固定安装有凸块(24),两个凸块(24)的外壁上固定安装有第二连接块(25)。
5.根据权利要求4所述的一种变配电消防灭火巡检机器人,其特征在于:两个所述第二连接块(25)的另一端均固定安装有控制杆(26),两个控制杆(26)的另一端均固定安装有第三连接块(27),两个第三连接块(27)腔内均固定安装有螺钉(28),两个螺钉(28)的上侧和下侧壁面上均固定安装有转向板(29),两个螺钉(28)均贯穿两个转向板(29)。
6.根据权利要求5所述的一种变配电消防灭火巡检机器人,其特征在于:两个所述螺钉(28)的另一端螺纹连接有螺母(30),螺母(30)的一侧壁面活动连接在底部转向板(29)的底部壁面上。
7.根据权利要求6所述的一种变配电消防灭火巡检机器人,其特征在于:两个所述转向板(29)其中底部的转向板(29)的顶部壁面上固定安装有第三旋转杆(31),第三旋转杆(31)贯穿两个转向板(29),第三旋转杆(31)的另一端固定连接在伺服电机(32)的输出端上,伺服电机(32)的另一端固定安装在主体(10)的顶部内壁上,第一旋转杆(13)的底部固定连接在伺服电机(32)的顶部输出端上。
技术总结
本技术涉及机器人技术领域,且公开了一种变配电消防灭火巡检机器人,包括主体,所述主体腔内呈镂空状态,主体腔内安装有转向装置,主体消防具有伸缩功能,主体的两端壁面上均固定安装防撞杆,两个防撞杆呈凹型,主体的顶部壁面上固定安装有第一旋转杆,第一旋转杆腔内呈镂空状态,第一旋转杆贯穿主体并伸入至主体腔内。通过设置第一旋转杆,第一旋转杆的底部通过伺服电机供电旋转,第一旋转杆旋转带动顶部的摄像头进行旋转,使得摄像头可以观察火灾现场的情况,防止主体在行驶过程中出现视野盲区,无法有效火场中的情况进行检测,可能出现火源复燃消防员无法及时发现的情况,提高机器人的火场检测能力和工作效率。
技术研发人员:曾贞,张程欣,董治民
受保护的技术使用者:旌电智能科技(河南)有限公司
技术研发日:20220826
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!