一种森林火灾树木攀爬灭火机器人
本发明属于森林灭火,具体涉及一种森林火灾树木攀爬灭火机器人。
背景技术:
1、森林火灾是森林最危险的敌人,也是林业最可怕的灾害,它会给森林带来最有害,最具有毁灭性的后果。森林火灾不但损害森林资源,同时也对当地经济发展和人民的生命安全等造成严重危害,最为重要的是森林火灾发生时产生的烟雾和灰尘对自然环境和生态环境造成极其重大的破坏。
2、现如今森林灭火主要以人工扑救和航空灭火为主,人工扑救可以实现精准灭火,但对救援人员的安全问题以及救援水源问题存在一定限制。航空灭火效果较好,灭火直升机调度灵活,支援频率高,可以克服救援人员难以进入的困难,但直升机的载水量很少,且费用较高。
技术实现思路
1、本发明的目的就在于为了解决上述问题而提供一种森林火灾树木攀爬灭火机器人。
2、本发明通过以下技术方案来实现上述目的:
3、一种森林火灾树木攀爬灭火机器人,包括载具组件,所述载具组件的上方设置有以下组件:
4、灭火组件,用于喷射高压水流进行灭火,包括设置于载具组件上的水箱、高压泵、管路、灭火喷头、以及用于收放管路的收放架;
5、树木攀爬组件,用于携带灭火喷头爬上树梢进行灭火,包括框架、设置于框架表面的履带、与履带环抱设置的动轮、设置于框架顶端的切割件。
6、通过设置树木攀爬组件,可以将灭火组件中的灭火喷头携带至高空,减少林木对灭火喷头的影响,增加的高度还可以提高灭喷头的喷射范围,提高灭火覆盖范围,灭火喷头不唯一,可以直线远距离喷射也可环形喷射形成水幕。
7、作为本发明的进一步优化方案,所述载具组件包括带有驱动结构的移动轮毂、以及供电系统,载具组件用于携带水箱,起到备用水源的目的,供电系统用于给各装置进行供电,以提高装置户外运行的稳定性。
8、作为本发明的进一步优化方案,所述框架的表面还设置有用户驱动履带的液压马达,框架垂直移动所需的动力和水管满载的重力比较大,使用液压马达可以达到需求。
9、作为本发明的进一步优化方案,所述切割件为环形刀具或者钢锯。
10、作为本发明的进一步优化方案,所述动轮通过液压收紧架设置于框架的侧表面,可改变环抱半径,适用于不同直径的树木,履带和动轮可增大机器人和树之间的摩擦力,便于垂直移动,一旦确定高度即可固定环抱半径。
11、作为本发明的进一步优化方案,所述收放架设置于水箱上方,且所述管路缠绕设置于收放架表面,所述管路的一端通过对接管与高压泵连接,且所述管路与对接管的连接处通过连管器拆卸式连接,收放架用于在爬树时释放管路。
12、作为本发明的进一步优化方案,所述管路远离对接管的一端与框架固定连接,所述管路靠近框架的一端通过万向转接头与灭火喷头连通。
13、作为本发明的进一步优化方案,所述框架的上端还设置有探测组件,所述探测组件包括视频摄像头以及红外摄像头,所述万向转接头设置有驱动装置,所述驱动装置与探测组件电性连接,用于确定火灾位置和灭火人员远程控制灭火喷头喷射角度和压力。
14、作为本发明的进一步优化方案,所述框架的顶端还设置有与管路连通的雾化喷头,一旦火灾蔓延至近场,用于保护灭火装置。
15、本发明的有益效果在于:
16、(1)本发明通过设置车体与树木攀爬灭火机器人相结合的方式,针对森林的复杂地形,可携带灭火喷头升高灭火喷头的高度,提高水枪的覆盖范围,并且通过视频摄像头提高视野范围,对起火源进行快速精准灭火,节省了救火时间,消除人员安全隐患。
17、(2)本发明通过设置雾化喷头不仅能对装置周围进行降温,提高装置使用的安全性,同时雾化喷头形成的水墙也可以阻挡火势的蔓延。
18、(3)该森林火灾树木攀爬灭火机器人,通过设置视频摄像头和红外摄像头,可以确定火灾位置并对火灾现场进行视频图像采集,方便观察记录火灾实时情况,便于灭火人员远程控制高压喷枪喷射角度和压力,实现远程灭火。
技术特征:
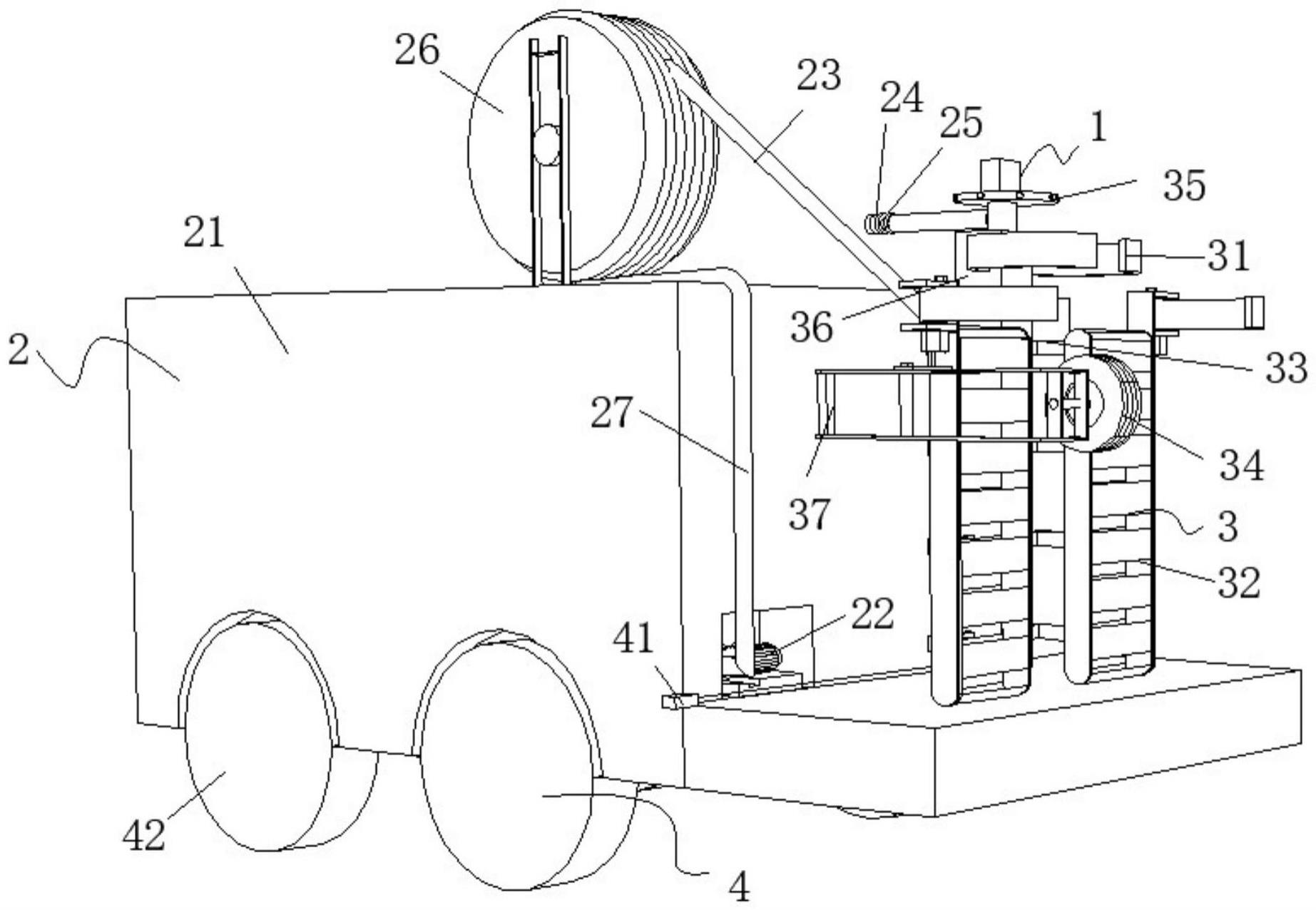
1.一种森林火灾树木攀爬灭火机器人,包括载具组件(4),其特征在于:所述载具组件(4)的上方设置有以下组件:
2.根据权利要求1所述的一种森林火灾树木攀爬灭火机器人,其特征在于:所述载具组件(4)包括带有驱动结构的移动轮毂(42)、以及供电系统(41)。
3.根据权利要求1所述的一种森林火灾树木攀爬灭火机器人,其特征在于:所述框架(36)的表面还设置有用户驱动履带(32)的液压马达(33)。
4.根据权利要求1所述的一种森林火灾树木攀爬灭火机器人,其特征在于:所述切割件(31)为环形刀具或者钢锯。
5.根据权利要求1所述的一种森林火灾树木攀爬灭火机器人,其特征在于:所述动轮(34)通过液压收紧架(37)设置于框架(36)的侧表面。
6.根据权利要求1所述的一种森林火灾树木攀爬灭火机器人,其特征在于:所述收放架(26)设置于水箱(21)上方,且所述管路(23)缠绕设置于收放架(26)表面,所述管路(23)的一端通过对接管(27)与高压泵(22)连接,且所述管路(23)与对接管(27)的连接处通过连管器拆卸式连接。
7.根据权利要求1所述的一种森林火灾树木攀爬灭火机器人,其特征在于:所述管路(23)远离对接管(27)的一端与框架(36)固定连接,所述管路(23)靠近框架(36)的一端通过万向转接头(25)与灭火喷头(24)连通。
8.根据权利要求7所述的一种森林火灾树木攀爬灭火机器人,其特征在于:所述框架(36)的上端还设置有探测组件(1),所述探测组件(1)包括视频摄像头(11)以及红外摄像头(12),所述万向转接头(25)设置有驱动装置,所述驱动装置与探测组件(1)电性连接。
9.根据权利要求1所述的一种森林火灾树木攀爬灭火机器人,其特征在于:所述框架(36)的顶端还设置有与管路(23)连通的雾化喷头(35)。
技术总结
本发明涉及一种森林火灾树木攀爬灭火机器人,包括载具组件,载具组件的上方设置有用于喷射高压水流进行灭火的灭火组件,用于携带灭火喷头爬上树梢进行灭火的树木攀爬组件,用于探测火情的探测组件。本发明通过机器灭火代替人工灭火,消除了人员安全隐患,同时,通过爬树功能可以实现高空灭火,并通过视频监控确定火源位置,利用高压喷枪调整角度对火源进行精准灭火,多组灭火机器人可在高空形成灭火水墙,实现全方位灭火,此外,此灭火机器人可实现长时间供水,灭火机器人的位置也可根据火情随时调整,此灭火机器人可有效缩短了灭火时间,增加灭火效率。
技术研发人员:陶常法,丁静,李睿,余平平,方宇豪
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!