一种消防机器人灭火系统和自动灭火方法
本发明属于消防机器人,具体来说是一种消防机器人灭火系统和自动灭火方法。
背景技术:
1、火灾具有突发性强、处置过程复杂、危害巨大、防治困难等特点,已成顽疾。消防机器人作为特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用,消防机器人可以替代消防员进入高温、有毒、缺氧、浓烟等各种危险复杂的环境进行灭火、救援和搜救工作。然而,目前消防机器人在确认火焰位置并实施灭火行为时,多是消防人员通过手持操控终端远程操作进行灭火。由于火灾现场存在信号干扰,往往容易导致无法及时找到火源,而延误灭火。
技术实现思路
1、为解决上述问题,本发明的目的是提供一种消防机器人灭火系统,灭火系统可基于自动灭火方法及时查找火源并灭火。
2、本发明提供一种自动灭火方法,通过深度学习技术对火灾现场的火焰进行识别,并且通过对水炮的落水点的识别来调整水炮方向,从而实现自动识别火焰并且灭火,克服了现有消防机器人在识别火源和进行灭火时需要人为操纵而导致效率低的问题。
3、本发明一种消防机器人灭火系统,包括消防机器人本体、水炮、摄像机、水炮俯仰调节装置和水炮水平调节装置;所述水炮通过水炮水平调节装置和水炮俯仰调节装置设置在消防机器人本体上;水炮上设置摄像机;水炮与一外部的消防水带连接;
4、所述消防机器人本体用于拖动消防水带到指定灭火位置;所述摄像机用于采集火灾现场的图像,并定位火焰以及水炮的落水点的位置;所述水炮可调整喷射形状,所述水炮俯仰调节装置和水炮水平调节装置用于调节水炮的方向,进而调整水炮的落水点,便于自动灭火。
5、进一步的,所述水炮水平调节装置设置在消防机器人本体,所述水炮俯仰调节装置设置在水炮水平调节装置上,水炮设置在水炮俯仰调节装置上。
6、本发明还提供一种自动灭火方法,所述自动灭火法方法基于消防机器人灭火系统,所述自动灭火方法包括下述步骤:
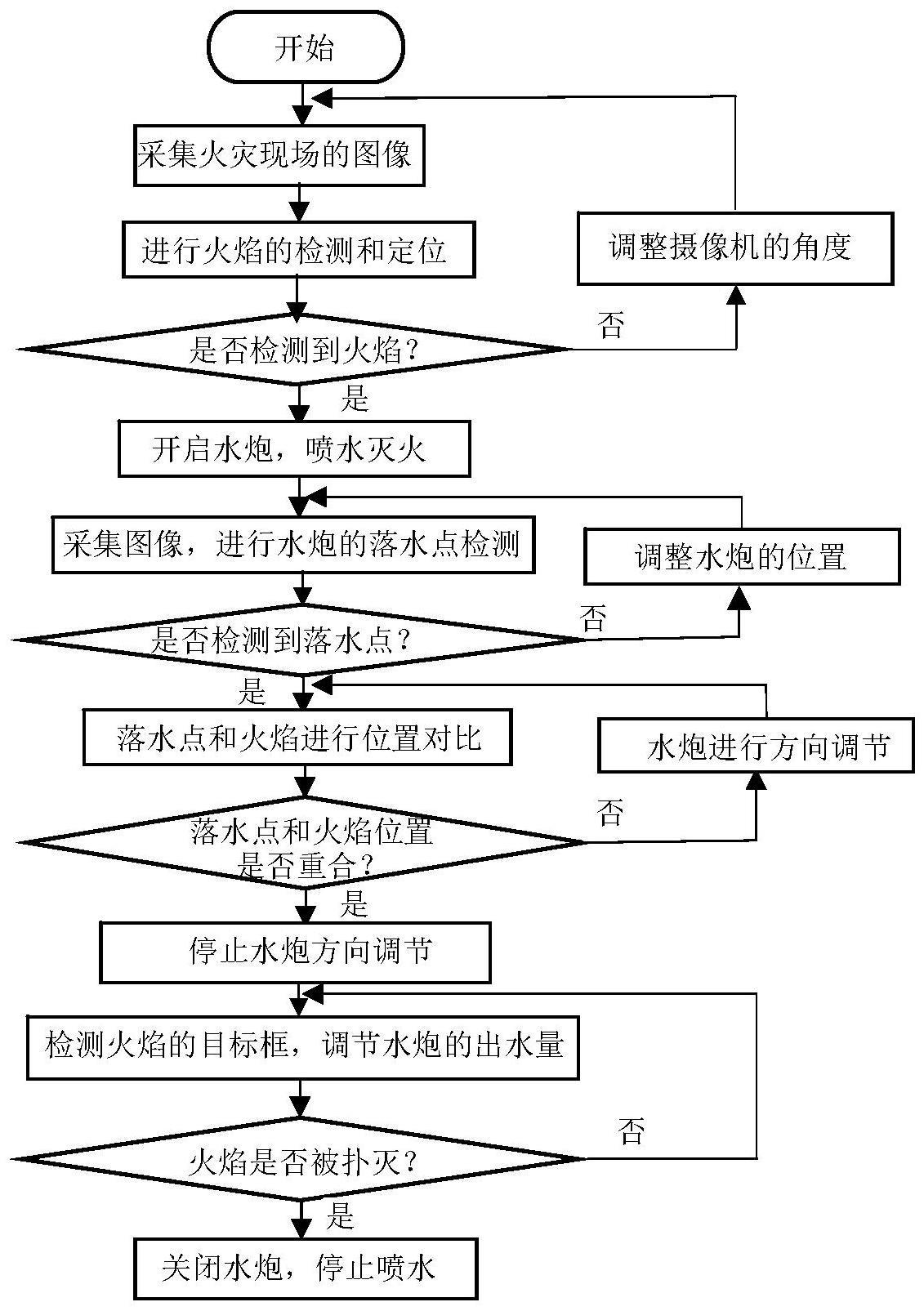
7、步骤s1:通过摄像机采集火灾现场的图像,作为原始图像;
8、步骤s2:通过目标检测算法对原始图像进行火焰的检测和定位;若原始图像没有检测到火焰,则调整摄像机的角度,并返回步骤s1;
9、步骤s3:开启水炮,喷水灭火;
10、步骤s4:通过摄像机连续采集图像,作为灭火图像;通过目标检测算法对灭火图像进行火焰和水炮的落水点的位置检测;
11、若灭火图像上检测到水炮的落水点,进入步骤s5;若灭火图像上未检测到水炮的落水点,则调整水炮的位置,重新进行步骤s4;
12、步骤s5:对灭火图像中水炮的落水点和火焰进行位置比对;
13、若水炮的落水点和火焰的位置不重合,对水炮进行方向调节,使水炮的落水点向火焰靠近,重复步骤s5,直到水炮的落水点和火焰的位置重合;
14、若水炮的落水点和火焰的位置重合,则灭火图像称为重合图像,进入步骤s6;
15、步骤s6:设定水炮的水压调节规则,并通过目标检测算法检测重合图像,得到火焰的目标框,根据火焰的目标框以及水炮的水压调节规则调整水炮的水压从而调节水炮的出水量;
16、步骤s7:检测重合图像中火焰是否被扑灭,若火焰被扑灭,则关闭水炮,停止喷水。
17、进一步的,在步骤s2中,摄像机的角度调整是通过水炮俯仰调节装置和水炮水平调节装置进行的;
18、先通过水炮水平调节装置进行水平方向的调整,再通过水炮俯仰调节装置进行垂直方向的调整;摄像机角度调整的过程中,会采集原始图像,若在水平方向调整过程中,原始图像中检测到火焰,则停止,不再进行垂直方向的调整。
19、进一步的,所述目标检测算法为yolo目标检测算法。
20、进一步的,所述yolo目标检测算法包括第一模块、第二模块、第三模块和第四模块;
21、步骤s4中,yolo目标检测算法对灭火图像进行火焰和水炮的落水点的位置检测的过程如下:
22、第一模块采用数据增强、自动学习包围框锚定、图像缩放对灭火图像进行预处理;
23、第二模块采用焦点下采样、改进的瓶颈层和空间金字塔池化结构对经第一模块处理后的灭火图像内的各个物体进行特征信息的提取;物体包括火焰和水炮的落水点;
24、第三模块采用特征金字塔结构与路径聚合网络结构相结合的方式对物体的特征信息进行传递;
25、第四模块通过损失函数分别计算得到各物体的分类、置信度损失和定位,从物体中选定目标物体,并通过非极大线性抑制来确定目标物体的目标框;当目标物体为火焰时,可得到火焰的目标框,并以此确定火焰的位置,当目标物体为水炮的落水点时,得到水炮的落水点的目标框,并以此确定水炮的落水点的位置。
26、进一步的,第四模块使用二值交叉熵损失函数来计算各个物体的分类和置信度损失,第四模块使用giou损失函数来计算定位。
27、进一步的,步骤五中,通过水炮俯仰调节装置和水炮水平调节装置对水炮进行水平和垂直方向调节,使水炮的落水点向火焰靠近;
28、若水炮的落水点在火焰的下方,则通过水炮俯仰调节装置向上调节水炮;若水炮的落水点在火焰的上方,则通过水炮俯仰调节装置向下调节水炮;若水炮的落水点在火焰的左侧,则通过水炮水平调节装置水平向右调节水炮;
29、若水炮的落水点在火焰的右侧,则通过水炮水平调节装置水平向左调节水炮。
30、进一步的,步骤s6中,根据火焰的目标框得到火焰的目标框的面积;
31、水炮的水压调节规则,包括:设定水炮的最低水压、最高水压以及对应的火焰的目标框的最小面积、最大面积;
32、将火焰的目标框的面积与最小面积以及最大面积进行比对,使水炮的水压维持在最低水压以及最高水压之间;
33、当火焰的目标框的面积小于等于最小面积时,水炮维持最低水压;当火焰的目标框的面积大于最小面积时,每增加x,则水炮的水压增加y;当火焰的目标框的面积大于等于最大面积时,水炮达到最高水压且维持不变。
34、进一步的,x处于4×105平方毫米-6×105平方毫米之间;y处于0.04 mp-0.12mp之间。
35、与现有技术相比,本发明的有益效果是:
36、(1)本发明通过消防机器人自身搭载的摄像机进行采集,自动检测火焰并根据火焰自动调节水炮方向进行灭火。
37、(2)本发明采用yolo目标检测算法,能够准确的检测到火焰和水炮的落水点的位置,并且检测速度能够达到实时要求。
38、(3)本发明采用自适应水炮出水量调节技术,根据火焰的大小改变水炮的出水量,从而可有效进行灭火。
技术特征:
1.一种消防机器人灭火系统,其特征在于,包括消防机器人本体、水炮、摄像机、水炮俯仰调节装置和水炮水平调节装置;所述水炮通过水炮水平调节装置和水炮俯仰调节装置设置在消防机器人本体上;水炮上设置摄像机;水炮与一外部的消防水带连接;
2.根据权利要求1所述的一种消防机器人灭火系统,其特征在于,所述水炮水平调节装置设置在消防机器人本体,所述水炮俯仰调节装置设置在水炮水平调节装置上,水炮设置在水炮俯仰调节装置上。
3.一种自动灭火方法,所述自动灭火法方法基于权利要求1-2任一项所述的消防机器人灭火系统,其特征在于,所述自动灭火方法包括下述步骤:
4.根据权利要求3所述的自动灭火方法,其特征在于,在步骤s2中,摄像机的角度调整是通过水炮俯仰调节装置和水炮水平调节装置进行的;
5.根据权利要求4所述的自动灭火方法,其特征在于,所述目标检测算法为yolo目标检测算法。
6.根据权利要求5所述的自动灭火方法,其特征在于,所述yolo目标检测算法包括第一模块、第二模块、第三模块和第四模块;
7.根据权利要求6所述的自动灭火方法,其特征在于,第四模块使用二值交叉熵损失函数来计算各个物体的分类和置信度损失,第四模块使用giou损失函数来计算定位。
8.根据权利要求3所述的自动灭火方法,其特征在于,步骤五中,通过水炮俯仰调节装置和水炮水平调节装置对水炮进行水平和垂直方向调节,使水炮的落水点向火焰靠近;
9.根据权利要求6所述的自动灭火方法,其特征在于:步骤s6中,根据火焰的目标框得到火焰的目标框的面积;
10.根据权利要求9所述的自动灭火方法,其特征在于:x处于4×105平方毫米-6×105平方毫米之间;y处于0.04 mp-0.12mp之间。
技术总结
本发明一种消防机器人灭火系统和自动灭火方法,自动灭火方法包括下述步骤:步骤S1:通过摄像机采集火灾现场的图像,作为原始图像;步骤S2:通过目标检测算法对原始图像进行火焰的检测和定位;步骤S3:开启水炮,喷水灭火;步骤S4:通过摄像机连续采集图像,作为灭火图像;通过目标检测算法对灭火图像进行火焰和水炮的落水点的位置检测;步骤S5:对灭火图像中水炮的落水点和火焰进行位置比对;步骤S6:设定水炮的水压调节规则,并通过目标检测算法检测重合图像,得到火焰的目标框,根据火焰的目标框以及水炮的水压调节规则调整水炮的水压从而调节水炮的出水量;步骤S7:检测重合图像中火焰是否被扑灭,若火焰被扑灭,则关闭水炮,停止喷水。
技术研发人员:裴文良,华长春
受保护的技术使用者:燕山大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!