细水雾远程操作机器人的制作方法
本技术涉及消防设备,具体涉及细水雾远程操作机器人。
背景技术:
1、在我国的项目工程中,如地铁、电缆隧道、仓库、体育馆、变电站等场所,都属于无人值守状态,只有传统的消火栓、干粉灭火器系统和报警系统。这些场所一旦出现火情,由于消息传递和距离的原因,消防人员不能在最佳的时间赶到现场,即使赶到现场,由于受到空间和物理环境的影响,也不能快速有效的灭火,最终导致生命和财产的损失发生,我国现有的消防机器人只有在火灾发生后,由消防人员驾驶的消防车辆运送到达火灾现场并连接水管,之后消防人员遥控放出消防机器人进行灭火,但是此时已经错过了最佳灭火时机,并且,一旦消防车由于多种原因无法到达现场,传统的消防机器人更加不能发挥其相应的功能作用,目前,代替消防员进入危险复杂环境的消防机器人应用越来越广泛,尽管人工智能相当成熟,但大喷射流量的遥控水炮面对高温、有毒气体、浓烟的火场很难产生好的灭火效果,而且不及时改善这种环境必将对人员造成巨大的伤害。由于细水雾具有表面冷却、窒息、冲击乳化和稀释,同时具有阻隔热辐射及洗涤烟雾、废气的功能,因此,将细水雾灭火技术与消防机器人的先进技术柔和在一起,研制出细水雾消防机器人,势在必行。针对现有技术存在以下问题:
2、1、现有的细水雾远程操作机器人,火场环境复杂,现有的机器人难以在复杂的火场环境中进行移动,导致机器人的工作效率较差;
3、2、现有的细水雾远程操作机器人,不便于进行多角度调节,不能够满足更多的角度要求,喷洒的范围较小。
技术实现思路
1、为解决上述技术问题,本实用新型所采用的技术方案是:
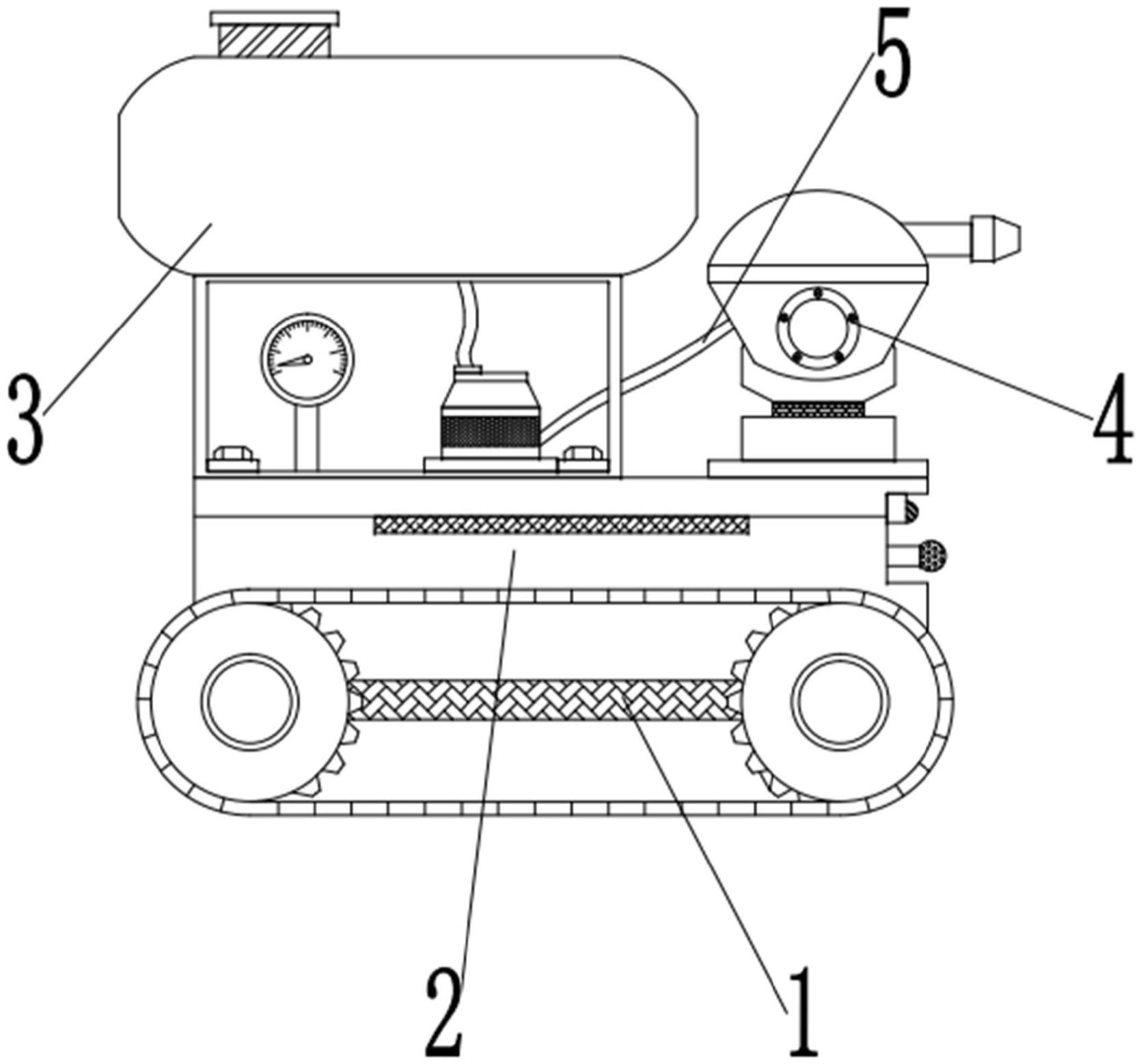
2、细水雾远程操作机器人,包括主体,所述主体的底部设置有动力组件,所述动力组件包括动力控制箱,所述动力控制箱固定安装在主体的顶部,所述动力控制箱的一侧固定安装有摄像头,所述动力控制箱的一侧固定安装有照明灯,所述动力控制箱的正面转动连接有移动齿轮,所述移动齿轮的外部设置有移动履带。
3、本实用新型技术方案的进一步改进在于:所述动力控制箱的顶部设置有供水组件,所述供水组件包括框架,所述框架固定安装在动力控制箱的顶部。
4、本实用新型技术方案的进一步改进在于:所述框架的内部螺纹连接有固定螺栓,所述框架的内部固定安装有压力表。
5、本实用新型技术方案的进一步改进在于:所述框架的内部固定安装有高压泵,所述框架的顶部固定安装有水箱,所述水箱的顶部设置有加水孔,所述高压泵的一侧固定连接有连接管。
6、本实用新型技术方案的进一步改进在于:所述动力控制箱的顶部设置有喷洒组件,所述喷洒组件包括底板,所述底板固定安装在动力控制箱的顶部。
7、本实用新型技术方案的进一步改进在于:所述底板的顶部固定安装有转动座,所述转动座的顶部转动连接有转动架。
8、本实用新型技术方案的进一步改进在于:所述转动架的正面固定安装有自锁电机,所述转动架的顶部固定安装有安装架,所述安装架的一侧固定安装有高压喷头。
9、由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
10、1、本实用新型提供细水雾远程操作机器人,通过摄像头、照明灯和移动履带的共同作用下,照明灯和摄像头均固定安装在动力控制箱的一端,摄像头能够对现场环境进行拍摄,便于工作人员观察地形,灭火后室内光线较暗时照明灯能够提供照明,移动履带通过移动齿轮带动进行移动,能够使机器人在复杂的环境更好的移动,提高机器人的工作效率。
11、2、本实用新型提供细水雾远程操作机器人,通过转动座和转动架的共同作用下,转动座固定安装在底板的顶部,转动座转动能够对高压喷头的方向进行调节,满足更多的方向要求,转动架转动连接在转动座的顶部,转动架通过自锁电机带动能够进行转动,转动架转动能够对高压喷头的角度进行调节,通过转动座和转动架的配合能够将高压喷头调节至更多的角度位置,提高喷洒范围。
技术特征:
1.细水雾远程操作机器人,包括主体(1),其特征在于:所述主体(1)的底部设置有动力组件(2),所述动力组件(2)包括动力控制箱(21),所述动力控制箱(21)固定安装在主体(1)的顶部,所述动力控制箱(21)的一侧固定安装有摄像头(24),所述动力控制箱(21)的一侧固定安装有照明灯(25),所述动力控制箱(21)的正面转动连接有移动齿轮(22),所述移动齿轮(22)的外部设置有移动履带(23)。
2.根据权利要求1所述的细水雾远程操作机器人,其特征在于:所述动力控制箱(21)的顶部设置有供水组件(3),所述供水组件(3)包括框架(31),所述框架(31)固定安装在动力控制箱(21)的顶部。
3.根据权利要求2所述的细水雾远程操作机器人,其特征在于:所述框架(31)的内部螺纹连接有固定螺栓(32),所述框架(31)的内部固定安装有压力表(33)。
4.根据权利要求2所述的细水雾远程操作机器人,其特征在于:所述框架(31)的内部固定安装有高压泵(34),所述框架(31)的顶部固定安装有水箱(35),所述水箱(35)的顶部设置有加水孔(36),所述高压泵(34)的一侧固定连接有连接管(5)。
5.根据权利要求1所述的细水雾远程操作机器人,其特征在于:所述动力控制箱(21)的顶部设置有喷洒组件(4),所述喷洒组件(4)包括底板(41),所述底板(41)固定安装在动力控制箱(21)的顶部。
6.根据权利要求5所述的细水雾远程操作机器人,其特征在于:所述底板(41)的顶部固定安装有转动座(42),所述转动座(42)的顶部转动连接有转动架(43)。
7.根据权利要求6所述的细水雾远程操作机器人,其特征在于:所述转动架(43)的正面固定安装有自锁电机(44),所述转动架(43)的顶部固定安装有安装架(45),所述安装架(45)的一侧固定安装有高压喷头(46)。
技术总结
本技术公开了细水雾远程操作机器人,涉及消防设备技术领域,包括主体,所述主体的底部设置有动力组件,所述动力组件包括动力控制箱,所述动力控制箱固定安装在主体的顶部,所述动力控制箱的一侧固定安装有摄像头,所述动力控制箱的一侧固定安装有照明灯,所述动力控制箱的正面转动连接有移动齿轮,所述移动齿轮的外部设置有移动履带。本技术照明灯和摄像头均固定安装在动力控制箱的一端,摄像头能够对现场环境进行拍摄,便于工作人员观察地形,灭火后室内光线较暗时照明灯能够提供照明,移动履带通过移动齿轮带动进行移动,能够使机器人在复杂的环境更好的移动,提高机器人的工作效率,便于进行多角度调节,提高喷洒范围。
技术研发人员:郭文军
受保护的技术使用者:北京金同泰科技有限公司
技术研发日:20230329
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!