一种多形态调节式消防巡检机器人的制作方法
本技术涉及消防机器人领域,具体涉及一种多形态调节式消防巡检机器人。
背景技术:
1、消防机器人是特种机器人的一种,在灭火和抢险救援中瑜伽发挥举足轻重的作用。随着社会经济的迅猛发展各种大型石油化工企业、隧道、地铁等不断增多,油品燃气、毒气泄漏爆炸、隧道、地铁坍塌等灾害隐患不断增加。此类灾害具有突发性强、处置过程复杂、危害巨大、防治困难等特点,已成顽疾。消防机器人能代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行数据采集、处理、反馈,有效地解决消防人员在上述场所面临的人身安全、数据信息采集不足等问题。现场指挥人员可以根据其反馈结果,及时对灾情作出科学判断,并对灾害事故现场工作作出正确、合理的决策。在对消防进行防范时也延伸出相应的消防巡检机器人以进行相应的巡检预防作业。
2、现有技术中常见的消防巡检机器人模式单一,作业高度固定,当遇到一些窄小空间,或是高度较高的位置时无法起到良好的巡检作用。
技术实现思路
1、实用新型目的:提供一种多形态调节式消防巡检机器人,以解决现有技术存在的上述问题。
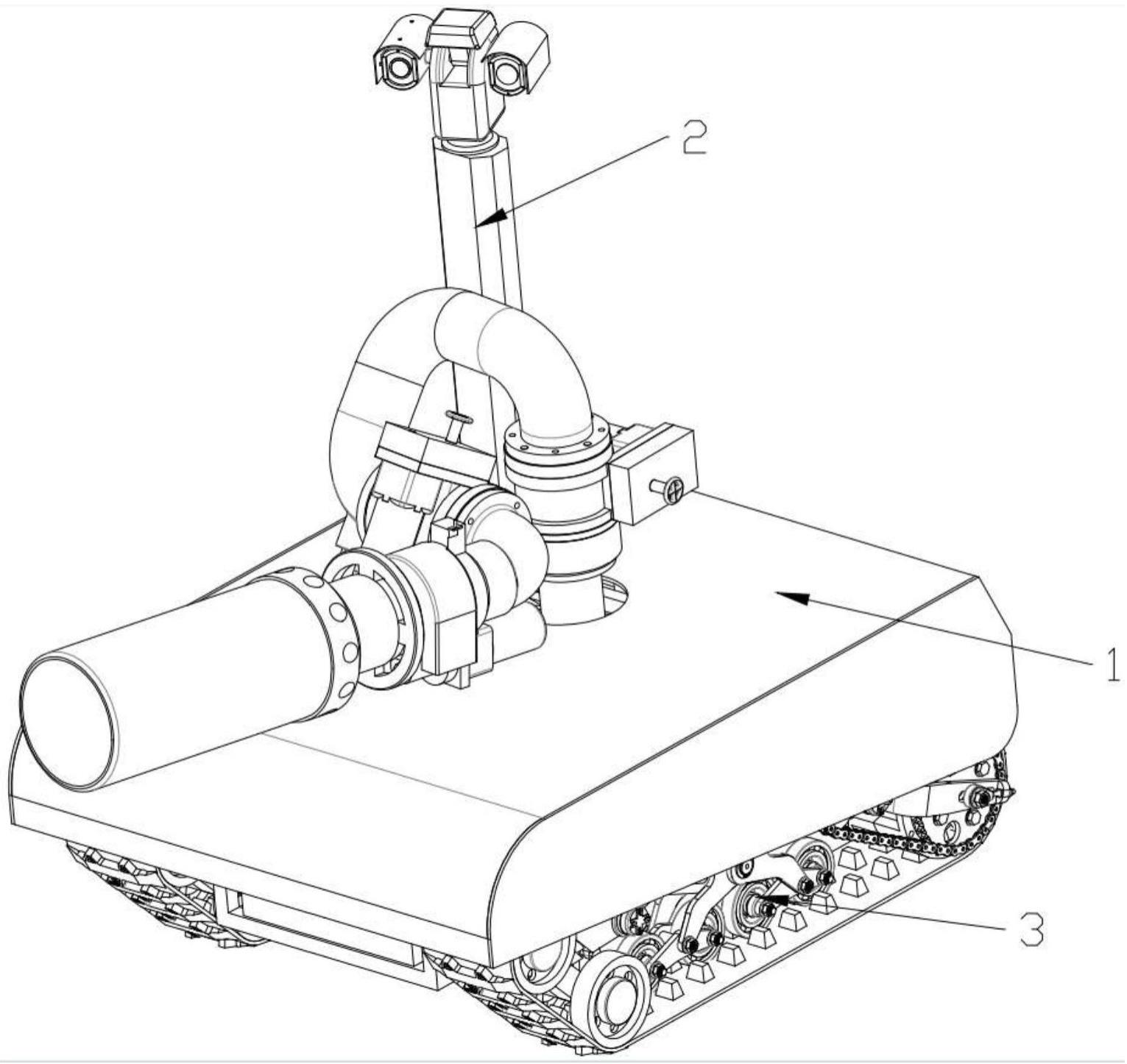
2、技术方案:一种多形态调节式消防巡检机器人,包括具有预定作业尺寸与收容性的基座,进一步还包括巡检组件和调节移动组件两个部分。所述巡检组件置于所述基座作业方向上壁面表面,可进行相应的监测与成像作业;所述调节移动组件置于所述基座作业方向下壁面表面,可进行相应的调节与移动作业。所述调节移动组件设有伸缩调节单元组,可进行预定范围内作业高度的调节。
3、在进一步的实施例中,所述巡检组件包括定位柱、旋转调节台和巡检摄像机三个部分。所述定位柱置于所述基座作业方向上壁面表面,具有预定的作业高度,可进行相应的限位与支撑作业;所述旋转调节台与所述定位柱转动连接,可绕与所述定位柱的连接点进行全方位转动调节作业;所述巡检摄像机与所述旋转调节台相连,可跟随所述旋转调节台的转动而进行相应作业方向的调节。
4、在进一步的实施例中,所述调节移动组件包括伸缩调节单元组和履带移动单元组两个部分。所述伸缩调节单元组与所述基座相连,可进行预定范围内作业高度的伸缩调节;所述履带移动单元组与所述定位调节机构相连,可跟随所述定位调节机构的伸缩调节进行相应作业状态的调节。
5、在进一步的实施例中,所述伸缩调节单元组包括中心定位板、伸缩调节柱和衔接杆三个部分。所述中心定位板中空且具有预定的收容性,与所述履带移动机构通过固定柱相互连通,可进行相应的定位与衔接作业;所述伸缩调节柱一端与所述中心定位板相连,另一端与所述基座相连,可进行预定范围内的伸缩调节作业;所述衔接杆贯穿过所述伸缩调节柱,并延伸出所述伸缩调节柱预定距离,可跟随所述伸缩调节柱的伸缩调节进行相应作业位置的调节。
6、在进一步的实施例中,所述履带移动单元组包括滚轮、定位轮和履带三个部分。所述滚轮通过调节臂与所述固定柱相连,并与所述调节臂转动连接,可绕与所述调节臂的连接点进行全方位转动作业,且所述滚轮为多个;所述定位轮与所述衔接杆转动连接,可绕与所述衔接杆的连接点进行全方位转动作业,并可跟随所述衔接杆进行相应作为位置的调节;所述履带包裹于所述滚轮作业面表面处,可将多个所述滚轮半包裹,并与所述滚轮相啮合,可跟随所述滚轮的转动进行相应作业位置的调节。
7、在进一步的实施例中,所述调节臂作业位置中心位置处与所述固定柱相连,且所述固定柱与所述衔接杆通过支柱相互连通;所述调节臂具有预定的灵活度,可进行相应的活动调节作业。
8、有益效果:本实用新型涉及一种多形态调节式消防巡检机器人,涉及消防机器人领域,包括具有预定作业尺寸与收容性的基座,还包括巡检组件和调节移动组件两个部分。巡检组件置于所述基座作业方向上壁面表面,可进行相应的监测与成像作业;调节移动组件置于所述基座作业方向下壁面表面,可进行相应的调节与移动作业;所述调节移动组件设有伸缩调节单元组,可进行预定范围内作业高度的调节。本申请可通过伸缩调节单元组灵活调节巡检机器人的作业高度与占地面积,能够自主适应更多的应用场景与需求,大幅增加了消防巡检机器人的运用范围,同时降低了巡检盲点与盲区,提高了消防巡检的质量与可靠性。
技术特征:
1.一种多形态调节式消防巡检机器人,包括具有预定作业尺寸与收容性的基座,其特征在于还:
2.根据权利要求1所述的一种多形态调节式消防巡检机器人,其特征在于,所述巡检组件包括:
3.根据权利要求1所述的一种多形态调节式消防巡检机器人,其特征在于:
技术总结
本技术涉及一种多形态调节式消防巡检机器人,涉及消防机器人领域,包括具有预定作业尺寸与收容性的基座,还包括巡检组件和调节移动组件两个部分。巡检组件置于所述基座作业方向上壁面表面,可进行相应的监测与成像作业;调节移动组件置于所述基座作业方向下壁面表面,可进行相应的调节与移动作业;所述调节移动组件设有伸缩调节单元组,可进行预定范围内作业高度的调节。本申请可通过伸缩调节单元组灵活调节巡检机器人的作业高度与占地面积,能够自主适应更多的应用场景与需求,大幅增加了消防巡检机器人的运用范围,同时降低了巡检盲点与盲区,提高了消防巡检的质量与可靠性。
技术研发人员:张利,杨文杰,季珂珂,孙胜利
受保护的技术使用者:徐州鑫科机器人有限公司
技术研发日:20230529
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!